You might also like
- Aplicaciones MilitaresDocument4 pagesAplicaciones MilitaresMabel NúñezNo ratings yet
- Sensors 2016Document20 pagesSensors 2016Sergey SokolovNo ratings yet
- Kaylee Wu - Literature ReviewDocument12 pagesKaylee Wu - Literature Reviewapi-684597989No ratings yet
- Sandino U2Document14 pagesSandino U2OM SARDESAI225286No ratings yet
- Waypoint and Autonomous Flying Control of An Indoor Drone For GPS-denied EnvironmentsDocument17 pagesWaypoint and Autonomous Flying Control of An Indoor Drone For GPS-denied EnvironmentsIAES International Journal of Robotics and AutomationNo ratings yet
- Remote Surveillance of Enclosed and Open Architectures Using Unmanned Vehicle With Advanced SecurityDocument7 pagesRemote Surveillance of Enclosed and Open Architectures Using Unmanned Vehicle With Advanced SecurityIJRES teamNo ratings yet
- Kulkarni 2019Document6 pagesKulkarni 2019sathish sathish h gNo ratings yet
- IJMTST7010Document8 pagesIJMTST7010Rehman ChNo ratings yet
- Sei Daliy Eva 2020Document19 pagesSei Daliy Eva 2020parashar88No ratings yet
- DroneDocument102 pagesDronePrashanth RajannaNo ratings yet
- Identitas JurnalDocument15 pagesIdentitas JurnalihsanNo ratings yet
- Prototype of Implementation of RadarDocument11 pagesPrototype of Implementation of RadarASHOK KUMAR RANANo ratings yet
- Improving Real-Time Drone Detection For Counter-Drone SystemsDocument26 pagesImproving Real-Time Drone Detection For Counter-Drone SystemsJU BCSE 2019-23No ratings yet
- Drone Detection Through Live Camera Using YOLOv3Document8 pagesDrone Detection Through Live Camera Using YOLOv3Ayapilla Sri hari PranavNo ratings yet
- Paper (INTELLIGENT NIGHT SURVELLIANCE USING DRONE)Document7 pagesPaper (INTELLIGENT NIGHT SURVELLIANCE USING DRONE)Lohit DalalNo ratings yet
- Autonomous Uavs Wildlife Detection Using Thermal Imaging, Predictive Navigation and Computer VisionDocument8 pagesAutonomous Uavs Wildlife Detection Using Thermal Imaging, Predictive Navigation and Computer VisionWylieNo ratings yet
- Automatic Quadcopter Control Avoiding Obstacle UsiDocument7 pagesAutomatic Quadcopter Control Avoiding Obstacle Usimathan mariNo ratings yet
- A Survey On Unmanned Vehicles Techniques For Terrain Detection in 3D EnvironmentDocument3 pagesA Survey On Unmanned Vehicles Techniques For Terrain Detection in 3D EnvironmentInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Synopsis For Mini Project DraftDocument7 pagesSynopsis For Mini Project DraftGiri GowdaNo ratings yet
- Isprsarchives XXXVIII 1 C22 107 2011Document6 pagesIsprsarchives XXXVIII 1 C22 107 2011Abhay GuptaNo ratings yet
- IJRPR12924Document8 pagesIJRPR12924Lohit DalalNo ratings yet
- Infrared Range Sensor Array For 3D Sensing in Robotic ApplicationsDocument9 pagesInfrared Range Sensor Array For 3D Sensing in Robotic Applicationshabib_archillaNo ratings yet
- Swarm Exploration of Unknown Areas On Mars Using SLAMDocument7 pagesSwarm Exploration of Unknown Areas On Mars Using SLAMhbhbhb hbhbhbNo ratings yet
- Drones 07 00174 With CoverDocument21 pagesDrones 07 00174 With CovermeenakshiNo ratings yet
- Drone With Image Processing: Structure and Design of DroneDocument3 pagesDrone With Image Processing: Structure and Design of DroneHamzahNo ratings yet
- Radar Guided Missile SystemDocument3 pagesRadar Guided Missile SystemVS JayarajNo ratings yet
- Journal Pone 0268834Document18 pagesJournal Pone 0268834Kris TestNo ratings yet
- Sensor Amien ToDocument18 pagesSensor Amien ToDante MelendezNo ratings yet
- Drone Detection Using Visual AnalysisDocument2 pagesDrone Detection Using Visual AnalysisArunav Jyoti OjahNo ratings yet
- Unmanned Arial System For Medical EmergenciesDocument5 pagesUnmanned Arial System For Medical Emergenciesknb1990No ratings yet
- Uav Ugv 1Document20 pagesUav Ugv 1Mauricio DIAZNo ratings yet
- Applsci 10 06945Document25 pagesApplsci 10 06945gurkanbasogluuNo ratings yet
- Project Funding ProposalDocument4 pagesProject Funding Proposalapi-376989569No ratings yet
- Monostatic and Bistatic Radar Measurements of Birds and Micro-DroneDocument5 pagesMonostatic and Bistatic Radar Measurements of Birds and Micro-DroneMarius CheroiuNo ratings yet
- Decision Process of Autonomous Drones For Environmental MonitoringDocument6 pagesDecision Process of Autonomous Drones For Environmental MonitoringPeterPanNo ratings yet
- Ijetae 1214 100Document5 pagesIjetae 1214 100akula pranathiNo ratings yet
- Intelligent Fire Monitor For Fire Robot Based On Infrared Image Feedback ControlDocument21 pagesIntelligent Fire Monitor For Fire Robot Based On Infrared Image Feedback ControlTemitayo Olutimi EjidokunNo ratings yet
- TS01F Phan Thi Takahashi 9871Document13 pagesTS01F Phan Thi Takahashi 9871Mihai Madalin SuicaNo ratings yet
- Human Controlled Search and Rescue Robot With BLE-based Victim LocalizationDocument8 pagesHuman Controlled Search and Rescue Robot With BLE-based Victim LocalizationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Plagrasim ReportDocument4 pagesPlagrasim ReportRahul RakhadeNo ratings yet
- Air TO Air UAV DETECTIONDocument3 pagesAir TO Air UAV DETECTIONthinkableofficialhandleNo ratings yet
- Notes 3Document82 pagesNotes 3sarvo singhNo ratings yet
- An Alternative Technique To Reduce Time, Cost and Human Effort During Natural or Manufactured DisastersDocument11 pagesAn Alternative Technique To Reduce Time, Cost and Human Effort During Natural or Manufactured DisastersIAES International Journal of Robotics and AutomationNo ratings yet
- Arduino Based Ultrasonic Range Finder - AbstractDocument3 pagesArduino Based Ultrasonic Range Finder - AbstractVIKAS PANDEYNo ratings yet
- Alive Human Body Detection and Tracking System Using An Autonomous PC Controlled Rescue RobotDocument4 pagesAlive Human Body Detection and Tracking System Using An Autonomous PC Controlled Rescue RobotrajatpreetNo ratings yet
- AIRCSIDocument6 pagesAIRCSICherrybelle ParuchelNo ratings yet
- Ir 1Document4 pagesIr 1yanivNo ratings yet
- Or Jin Alma KaleDocument5 pagesOr Jin Alma Kaleibrahim durmuşNo ratings yet
- Bun de IntroducereDocument15 pagesBun de IntroducereElena JelerNo ratings yet
- Remotesensing 12 03035Document28 pagesRemotesensing 12 03035đạt lê viếtNo ratings yet
- Sensor - Fusion - Using - Model - Predictive - Control - For - D 4Document12 pagesSensor - Fusion - Using - Model - Predictive - Control - For - D 4Nguyen Phan LamNo ratings yet
- Onboard Detection and Localization of Drones Using Depth MapsDocument11 pagesOnboard Detection and Localization of Drones Using Depth MapskumamennaNo ratings yet
- Quadcopter - Obstacle Detection and Collision Avoidance: Prathamesh Salaskar, Saee Paranjpe, Jagdish Reddy, Arish ShahDocument4 pagesQuadcopter - Obstacle Detection and Collision Avoidance: Prathamesh Salaskar, Saee Paranjpe, Jagdish Reddy, Arish ShahRyan FebrianNo ratings yet
- SM873Document12 pagesSM873Petar BajsićNo ratings yet
- European Journal of Theoretical and Applied SciencesDocument6 pagesEuropean Journal of Theoretical and Applied SciencesEJTAS journalNo ratings yet
- A UAV Detection Algorithm Based On An Artificial Neural NetworkDocument9 pagesA UAV Detection Algorithm Based On An Artificial Neural NetworkanjulNo ratings yet
- Design and ImplementationDocument4 pagesDesign and ImplementationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automated Detection, Locking and Hitting A Fast Moving Aerial Object by Image Processing (Suitable For Guided Missile)Document10 pagesAutomated Detection, Locking and Hitting A Fast Moving Aerial Object by Image Processing (Suitable For Guided Missile)mahmoudNo ratings yet
- Mm-Pose Real-Time Human Skeletal Posture Estimation Using Mmwave Radars and CNNsDocument13 pagesMm-Pose Real-Time Human Skeletal Posture Estimation Using Mmwave Radars and CNNsSatnam SinghNo ratings yet
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlFrom EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlNo ratings yet
- The Use of Artificial Intelligence in Interrogation: Lies and TruthDocument9 pagesThe Use of Artificial Intelligence in Interrogation: Lies and TruthIAES International Journal of Robotics and AutomationNo ratings yet
- CURe-Mi Mobile Manipulator Robot For Contact-Less COVID-19 Patients Serving MissionsDocument12 pagesCURe-Mi Mobile Manipulator Robot For Contact-Less COVID-19 Patients Serving MissionsIAES International Journal of Robotics and AutomationNo ratings yet
- Object Distance Estimation Using A Monovision CameraDocument7 pagesObject Distance Estimation Using A Monovision CameraIAES International Journal of Robotics and AutomationNo ratings yet
- Robotic Inspection and Automated Analysis System For Advanced ManufacturingDocument13 pagesRobotic Inspection and Automated Analysis System For Advanced ManufacturingIAES International Journal of Robotics and AutomationNo ratings yet
- Traffic Lights Time Strategy For T-Junctions of Toll Road GateDocument10 pagesTraffic Lights Time Strategy For T-Junctions of Toll Road GateIAES International Journal of Robotics and AutomationNo ratings yet
- Vector-Logic Computing For Faults-As-Address Deductive SimulationDocument15 pagesVector-Logic Computing For Faults-As-Address Deductive SimulationIAES International Journal of Robotics and AutomationNo ratings yet
- Competition On The Medical Robotics Markets For ElderlyDocument10 pagesCompetition On The Medical Robotics Markets For ElderlyIAES International Journal of Robotics and Automation100% (1)
- Development of Image Super-Resolution FrameworkDocument5 pagesDevelopment of Image Super-Resolution FrameworkIAES International Journal of Robotics and AutomationNo ratings yet
- Fuzzy-Proportional-Integral-Derivative Hybrid Controller Design For Ultra-High Temperature Milk ProcessingDocument11 pagesFuzzy-Proportional-Integral-Derivative Hybrid Controller Design For Ultra-High Temperature Milk ProcessingIAES International Journal of Robotics and AutomationNo ratings yet
- Water Level Control of Small-Scale Recirculating Aquaculture System With Protein Skimmer Using Fuzzy Logic ControllerDocument15 pagesWater Level Control of Small-Scale Recirculating Aquaculture System With Protein Skimmer Using Fuzzy Logic ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Smart Factory For Future Industry DevelopmentDocument5 pagesSmart Factory For Future Industry DevelopmentIAES International Journal of Robotics and AutomationNo ratings yet
- Position Control of AX-12 Servo Motor Using Proportional-Integral-Derivative Controller With Particle Swarm Optimization For Robotic Manipulator ApplicationDocument8 pagesPosition Control of AX-12 Servo Motor Using Proportional-Integral-Derivative Controller With Particle Swarm Optimization For Robotic Manipulator ApplicationIAES International Journal of Robotics and AutomationNo ratings yet
- Pick-And-Place Application Using A Dual Arm Collaborative Robot and An RGB-D Camera With YOLOv5Document14 pagesPick-And-Place Application Using A Dual Arm Collaborative Robot and An RGB-D Camera With YOLOv5IAES International Journal of Robotics and AutomationNo ratings yet
- Semi-Active Structural Vibration Control With Magnetorheological Damper Based On Hybrid Fuzzy Sliding Mode ControllerDocument12 pagesSemi-Active Structural Vibration Control With Magnetorheological Damper Based On Hybrid Fuzzy Sliding Mode ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Real-Time Microreaction Recognition SystemDocument10 pagesReal-Time Microreaction Recognition SystemIAES International Journal of Robotics and AutomationNo ratings yet
- A Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsDocument14 pagesA Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsIAES International Journal of Robotics and AutomationNo ratings yet
- Aerial Robot Swarms: A ReviewDocument9 pagesAerial Robot Swarms: A ReviewIAES International Journal of Robotics and AutomationNo ratings yet
- Model-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceDocument14 pagesModel-Based and Machine Learning-Based High-Level Controller For Autonomous Vehicle Navigation: Lane Centering and Obstacles AvoidanceIAES International Journal of Robotics and AutomationNo ratings yet
- Assembling, Simulating, and Recording Robot Videos As An Effort To Motivate Middle School Students and Teachers of Science in Bengkulu ProvinceDocument11 pagesAssembling, Simulating, and Recording Robot Videos As An Effort To Motivate Middle School Students and Teachers of Science in Bengkulu ProvinceIAES International Journal of Robotics and AutomationNo ratings yet
- Self-Organization of A Wheeled Robotic Swarm Using Virtual Spring-Damper MeshDocument16 pagesSelf-Organization of A Wheeled Robotic Swarm Using Virtual Spring-Damper MeshIAES International Journal of Robotics and AutomationNo ratings yet
- 3D Human Hands Rendering by A Six Degrees of Freedom Collaborative Robot and A Single 2D CameraDocument12 pages3D Human Hands Rendering by A Six Degrees of Freedom Collaborative Robot and A Single 2D CameraIAES International Journal of Robotics and AutomationNo ratings yet
- Modeling and Performance Analysis of Open-Loop Remotely Operated Vehicles ORCADocument17 pagesModeling and Performance Analysis of Open-Loop Remotely Operated Vehicles ORCAIAES International Journal of Robotics and AutomationNo ratings yet
- Conceptual Design and Simulation Study of An Autonomous Indoor Medical Waste Collection RobotDocument12 pagesConceptual Design and Simulation Study of An Autonomous Indoor Medical Waste Collection RobotIAES International Journal of Robotics and Automation100% (1)
- Design of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlDocument10 pagesDesign of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlIAES International Journal of Robotics and AutomationNo ratings yet
- On Solving The Kinematics and Controlling of Origami Box-Shaped RobotsDocument13 pagesOn Solving The Kinematics and Controlling of Origami Box-Shaped RobotsIAES International Journal of Robotics and AutomationNo ratings yet
- Mechanism Design For Walking Typed Solar Panel-Cleaning Robot Using Triple Driving LinesDocument19 pagesMechanism Design For Walking Typed Solar Panel-Cleaning Robot Using Triple Driving LinesIAES International Journal of Robotics and AutomationNo ratings yet
- Modeling and Performance Analysis of Open-Loop Remotely Operated Vehicles ORCADocument17 pagesModeling and Performance Analysis of Open-Loop Remotely Operated Vehicles ORCAIAES International Journal of Robotics and AutomationNo ratings yet
- A Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsDocument14 pagesA Model-Free Continuous Integral Sliding Mode Controller For Robust Control of Robotic ManipulatorsIAES International Journal of Robotics and AutomationNo ratings yet
- Microexpression Recognition RobotDocument9 pagesMicroexpression Recognition RobotIAES International Journal of Robotics and AutomationNo ratings yet
- Design of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlDocument10 pagesDesign of A Fuzzy Logic Proportional Integral Derivative Controller of Direct Current Motor Speed ControlIAES International Journal of Robotics and AutomationNo ratings yet
- Remote SensingDocument17 pagesRemote Sensingyadanar shineNo ratings yet
- Design and Numerical Analysis of A Circular SPR Based PCF Biosensor For Aqueous EnvironmentsDocument7 pagesDesign and Numerical Analysis of A Circular SPR Based PCF Biosensor For Aqueous Environmentsid.danlard5282No ratings yet
- MNAV100CA Users ManualDocument50 pagesMNAV100CA Users ManualYirui TangNo ratings yet
- Vds Tits 2007Document218 pagesVds Tits 2007Julio César AlcarazNo ratings yet
- MANUALE ARCHIMEDE 1000 ENG LauraDocument41 pagesMANUALE ARCHIMEDE 1000 ENG LauraAngelNo ratings yet
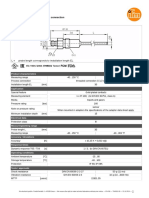
- Temperature Sensor With Process Connection: L Probe Length Corresponds To Installation Length ELDocument2 pagesTemperature Sensor With Process Connection: L Probe Length Corresponds To Installation Length ELImad YahyaNo ratings yet
- Wheatstone Bridge Participant GuideDocument41 pagesWheatstone Bridge Participant GuideFabian Eduardo FlorezNo ratings yet
- Refrigeration Tools PDFDocument34 pagesRefrigeration Tools PDFOtman Othman100% (1)
- L2665 Rev 7Document6 pagesL2665 Rev 7Surendra PatamsettyNo ratings yet
- Humalyte UserDocument188 pagesHumalyte UserAyaovi JorlauNo ratings yet
- Technical Code Reference Toshiba 166Document268 pagesTechnical Code Reference Toshiba 166Morteza JalalyNo ratings yet
- Sequential Multipoint Injection 3-4 Cyl: Beltrami MarcoDocument13 pagesSequential Multipoint Injection 3-4 Cyl: Beltrami MarcoDenis Alexander Ibañez GonzalesNo ratings yet
- O & M Manual - FA System - Speed FireDocument117 pagesO & M Manual - FA System - Speed FireArfaz HussainNo ratings yet
- 307 161-02 Ta-Cmi GBDocument21 pages307 161-02 Ta-Cmi GBAhmed SherifNo ratings yet
- W 27Document8 pagesW 27Cris LopesNo ratings yet
- YELLOW JACKET Refrigeration System Analyzer User ManualDocument16 pagesYELLOW JACKET Refrigeration System Analyzer User ManualambuenaflorNo ratings yet
- BST - B303 - Web Guiding - EN - CompactadoDocument32 pagesBST - B303 - Web Guiding - EN - CompactadojovemrafinhaNo ratings yet
- Plastic Optical Fiber SensorsDocument27 pagesPlastic Optical Fiber SensorsammihaescNo ratings yet
- Vaisala DM70 DatasheetDocument2 pagesVaisala DM70 Datasheetpetr kubicekNo ratings yet
- 3 Fire Extinguisher SystemsDocument29 pages3 Fire Extinguisher SystemsLikaaNo ratings yet
- EAC3016 - FUNDAMENTALS-OF-SENSORS-AND-IOT - LT - 1.0 - 37 - Fundamentals of Sensors and IoTDocument3 pagesEAC3016 - FUNDAMENTALS-OF-SENSORS-AND-IOT - LT - 1.0 - 37 - Fundamentals of Sensors and IoTPickle RickNo ratings yet
- Electronic Instrument Handbook Third EditionDocument1,217 pagesElectronic Instrument Handbook Third Editionhashemowida100% (39)
- Automation Basics - Combustible Gas Detector Sensor Drift - Catalytic vs. Infrared - ISA PDFDocument1 pageAutomation Basics - Combustible Gas Detector Sensor Drift - Catalytic vs. Infrared - ISA PDFAnas AzzedineNo ratings yet
- Manual 975mr Multi Spectrum Infrared Flame Detector en 72960Document80 pagesManual 975mr Multi Spectrum Infrared Flame Detector en 72960Patita PerezNo ratings yet
- Design and Analysis of Automated Guided VehicleDocument11 pagesDesign and Analysis of Automated Guided Vehiclevyshnavipalutla56No ratings yet
- M Hac120 (E01)Document40 pagesM Hac120 (E01)omar tlebNo ratings yet
- Water PH +EC Sensor (Rail Type) (PH Ordinary Electrode, EC Stainless Steel 10.0 Electrode)Document9 pagesWater PH +EC Sensor (Rail Type) (PH Ordinary Electrode, EC Stainless Steel 10.0 Electrode)zoids tdbNo ratings yet
- S KEVCY 24 AEDocument4 pagesS KEVCY 24 AEMahyar MashayekhiNo ratings yet
- Team FourDocument9 pagesTeam Fourapi-700601122No ratings yet
- CondutivimetroDocument108 pagesCondutivimetroTalles CursoNo ratings yet