You might also like
- 二極體應用電路Document13 pages二極體應用電路N26094354鐘筠凱No ratings yet
- 電子學重點Document21 pages電子學重點CharlesNo ratings yet
- TD21802 升科大四技基本電學跨越講義詳解-ch03 串聯電路 PDFDocument10 pagesTD21802 升科大四技基本電學跨越講義詳解-ch03 串聯電路 PDF吳昱德No ratings yet
- 16S45 JingdaoDocument3 pages16S45 JingdaoMaria carmoNo ratings yet
- Lab1Document6 pagesLab1yufeng.660205No ratings yet
- 11 變壓器之試驗Document14 pages11 變壓器之試驗Vic ChanNo ratings yet
- 压电 MEMS 器件设计与仿真-讲义1Document33 pages压电 MEMS 器件设计与仿真-讲义1pengb07No ratings yet
- 008 2019春季期末考题Document4 pages008 2019春季期末考题甘甘铠轩No ratings yet
- 正弦波Document7 pages正弦波lsy011114No ratings yet
- 13感應電動機特性Document4 pages13感應電動機特性Zac2 Chris (002)No ratings yet
- PDFDocument289 pagesPDF王信孝No ratings yet
- BR50005L YangjieDocument2 pagesBR50005L YangjieChristian Torres DavilaNo ratings yet
- 10.20 HomeworkDocument9 pages10.20 Homework郭俊志No ratings yet
- 電子學公式集 第三章Document3 pages電子學公式集 第三章Shu Shujaat LinNo ratings yet
- 1電子學公式集 第三章 PDFDocument3 pages1電子學公式集 第三章 PDF張琦讓No ratings yet
- Lab 4Document7 pagesLab 4eric0910160212No ratings yet
- Deyu CaiDocument1 pageDeyu CaiSKYLERNo ratings yet
- Ps817 KentoDocument10 pagesPs817 KentosuppoNo ratings yet
- Bandgap & LDO - 李福乐Document46 pagesBandgap & LDO - 李福乐anonNo ratings yet
- Rubycon寿命计算公式Document12 pagesRubycon寿命计算公式57184522No ratings yet
- Lecture 7 SemiconductorDocument48 pagesLecture 7 SemiconductorShou-Hua HsuNo ratings yet
- Dzexams 1as Techno Ge 20151 427474 (1) RedactedDocument6 pagesDzexams 1as Techno Ge 20151 427474 (1) RedactedMoulay ZoubirNo ratings yet
- Lecture 10Document50 pagesLecture 10Claribel SefiraNo ratings yet
- 011-2014年秋季学期期末考题A卷0 626204940 751806798Document8 pages011-2014年秋季学期期末考题A卷0 626204940 751806798甘甘铠轩No ratings yet
- 1.4 BJT放大器设计与测试Document9 pages1.4 BJT放大器设计与测试Pure DecSecNo ratings yet
- 10 變壓器之連結法Document30 pages10 變壓器之連結法Vic ChanNo ratings yet
- Bandgap and LDODocument46 pagesBandgap and LDOMUCKRAKERNo ratings yet
- OPA重點Document16 pagesOPA重點傑哥王No ratings yet
- 全華_ch01A_傳輸線(電路觀點)Document77 pages全華_ch01A_傳輸線(電路觀點)Bowncat YehNo ratings yet
- RC 充放電暫態現象與電路之分析 RL 充放電暫態現象與電路之分析Document276 pagesRC 充放電暫態現象與電路之分析 RL 充放電暫態現象與電路之分析t111830048No ratings yet
- 第三章 (雷达天线建模仿真)Document38 pages第三章 (雷达天线建模仿真)Yilin ChenNo ratings yet
- pvqc單字Document47 pagespvqc單字wukai375No ratings yet
- exp2克希荷夫Document5 pagesexp2克希荷夫t077762571No ratings yet
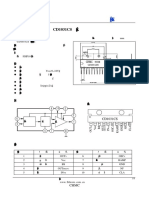
- CD1031 DatasheetDocument4 pagesCD1031 DatasheetJose BenavidesNo ratings yet
- 2020ese启蒙第一期题目a题 (硬件)Document32 pages2020ese启蒙第一期题目a题 (硬件)Jasper WangNo ratings yet
- 實驗三 Kirchhoff電壓及電流定律Document4 pages實驗三 Kirchhoff電壓及電流定律Karen LanNo ratings yet
- Fourier 990301Document21 pagesFourier 990301劉燕明No ratings yet
- 2021 - 電工實驗講義 - NEWDocument38 pages2021 - 電工實驗講義 - NEW林峻緯No ratings yet
- 電晶體Document19 pages電晶體謝秉儒No ratings yet
- Data SheetDocument3 pagesData SheetWilliam ZeledonNo ratings yet
- DatasheetDocument4 pagesDatasheetАндрей СолошенкоNo ratings yet
- 適用於輔助繞阻或永磁式無刷式發電機 與 Leroy Somer R448*相容 與 IVT-1260 / IVT-2460 勵磁輔助電源轉換器搭配使用可有效提昇 發電機起動馬達能力Document5 pages適用於輔助繞阻或永磁式無刷式發電機 與 Leroy Somer R448*相容 與 IVT-1260 / IVT-2460 勵磁輔助電源轉換器搭配使用可有效提昇 發電機起動馬達能力謝玉順No ratings yet
- 實驗五Document5 pages實驗五c24106032No ratings yet
- Phy Formulae CDocument2 pagesPhy Formulae CpeterNo ratings yet
- KP 1400 52Document4 pagesKP 1400 52mahmoodalmotamize1No ratings yet
- 天线原理与设计 (王建) 4PDF版Document72 pages天线原理与设计 (王建) 4PDF版mingwei sunNo ratings yet
- 03&04 變壓器 PDFDocument31 pages03&04 變壓器 PDFleung ka kitNo ratings yet
- 3DD1545-Huajing MicroelectronicsDocument2 pages3DD1545-Huajing Microelectronicsdavid folosaNo ratings yet
- DDSC I 00023 09 基本電學總複習第9章Document26 pagesDDSC I 00023 09 基本電學總複習第9章吳昱德No ratings yet
- KP 800 42Document4 pagesKP 800 42Sina MehrabafiNo ratings yet
- 17-單元十七 基本交流電路Document6 pages17-單元十七 基本交流電路hhlinkyNo ratings yet
- 基本電學Document17 pages基本電學李秉勳No ratings yet
- 電子學 09 PDFDocument16 pages電子學 09 PDF安王No ratings yet
- 實習21史密特觸發電路V2Document9 pages實習21史密特觸發電路V2許崴翔No ratings yet
- 實習21史密特觸發電路V2Document9 pages實習21史密特觸發電路V2許崴翔No ratings yet
- D13009 EtcDocument1 pageD13009 EtcBaharak BaghiNo ratings yet
- JPC817Document6 pagesJPC817Felipe CostaNo ratings yet
- 戶政事務所通報身分資料變更或遺失換發健保卡作業QA 1070611Document4 pages戶政事務所通報身分資料變更或遺失換發健保卡作業QA 1070611kungchineseNo ratings yet
- 健保卡認證元件 安裝手冊Mac版Document5 pages健保卡認證元件 安裝手冊Mac版kungchineseNo ratings yet
- 健保卡網路註冊問答集 (承保) FAQDocument4 pages健保卡網路註冊問答集 (承保) FAQkungchineseNo ratings yet
- 公寓大廈(社區)申請報備書Document19 pages公寓大廈(社區)申請報備書kungchineseNo ratings yet
- 东芝电梯基板说明Document4 pages东芝电梯基板说明邵波No ratings yet
- 02 直流電動機之原理及構造Document34 pages02 直流電動機之原理及構造Vic ChanNo ratings yet
- 馬達特性與選用Document40 pages馬達特性與選用Brian HuangNo ratings yet
- 單元二 Ch3 給排水衛生設備工程品質管理實務 定稿版(Word格式)Document109 pages單元二 Ch3 給排水衛生設備工程品質管理實務 定稿版(Word格式)KHNo ratings yet
- 交流电控技术Document27 pages交流电控技术Handy LeeNo ratings yet