You might also like
- Technology VisionDocument289 pagesTechnology VisionPrabhat KumarNo ratings yet
- USDA Wetland Restoration, Enhancement and ManagementDocument375 pagesUSDA Wetland Restoration, Enhancement and Managementga_trailblazer100% (2)
- Battery-Free Wireless Imaging of Underwater EnvironmentsDocument9 pagesBattery-Free Wireless Imaging of Underwater EnvironmentsDeepak Singh YadavNo ratings yet
- Math 5Document2 pagesMath 5jilliancavanllagasNo ratings yet
- EH612 - Ocean & Global ChangeDocument9 pagesEH612 - Ocean & Global Changebiswas.sayanNo ratings yet
- Deep Sea RestorationDocument9 pagesDeep Sea RestorationSandra KloffNo ratings yet
- 007 Learning Instrument Invariant Characteristics For GeneratingDocument8 pages007 Learning Instrument Invariant Characteristics For GeneratingVINESSE JUMAWIDNo ratings yet
- Development of A Simulation Method For The Subsea Production SystemDocument14 pagesDevelopment of A Simulation Method For The Subsea Production Systemthlim19078656No ratings yet
- Seagrass Watch Bali Workshop May09 PDFDocument56 pagesSeagrass Watch Bali Workshop May09 PDFJuraij BawazierNo ratings yet
- Yusup 2020 IOP Conf. Ser. Earth Environ. Sci. 429 012046Document9 pagesYusup 2020 IOP Conf. Ser. Earth Environ. Sci. 429 012046Rhaiza PabelloNo ratings yet
- Marine GeologyDocument1 pageMarine GeologyHartford CourantNo ratings yet
- NASA 175739main 05-03-07Document1 pageNASA 175739main 05-03-07NASAdocumentsNo ratings yet
- Pedersen Detection of Marine Animals in A New Underwater Dataset With CVPRW 2019 PaperDocument9 pagesPedersen Detection of Marine Animals in A New Underwater Dataset With CVPRW 2019 Papermahalekshmi anilNo ratings yet
- Ocean TechnologyDocument23 pagesOcean TechnologypatricknotrickstarNo ratings yet
- Research MethodsDocument2 pagesResearch MethodsIvar VillarojoNo ratings yet
- UC Davis Previously Published WorksDocument15 pagesUC Davis Previously Published WorksSara ItssaraNo ratings yet
- Bathymetry DS BATHDocument2 pagesBathymetry DS BATHPorche GtrNo ratings yet
- Coral Reef Remote Sensing: James A. Goodman Samuel J. Purkis Stuart R. Phinn EditorsDocument446 pagesCoral Reef Remote Sensing: James A. Goodman Samuel J. Purkis Stuart R. Phinn Editorsallu aaNo ratings yet
- 1 s2.0 S0034425721003084 MainDocument26 pages1 s2.0 S0034425721003084 MainjsmnlzcNo ratings yet
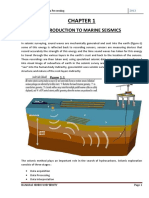
- Final Dissertation Introduction To Marine Seismics PDFDocument66 pagesFinal Dissertation Introduction To Marine Seismics PDFjast5No ratings yet
- Seabed Resident Event Driven Profiling (SREP) System For Monsoon StudiesDocument2 pagesSeabed Resident Event Driven Profiling (SREP) System For Monsoon StudiesmauryapkNo ratings yet
- Medical Knowledge From The SeaDocument21 pagesMedical Knowledge From The SeaamandaNo ratings yet
- DT 11 122Document123 pagesDT 11 122Carlo AltieriNo ratings yet
- Design, Analysis and Installation of Offshore Instrumented Moored Data Buoy SystemDocument14 pagesDesign, Analysis and Installation of Offshore Instrumented Moored Data Buoy SystemJowin JosephNo ratings yet
- Energetic Power Estimation of Swells and Orbital Marine Currents in Benin Coastal Zone (Gulf of Guinea)Document17 pagesEnergetic Power Estimation of Swells and Orbital Marine Currents in Benin Coastal Zone (Gulf of Guinea)IJAR JOURNALNo ratings yet
- Thesis Macmillan-LawlerDocument233 pagesThesis Macmillan-LawlerAntonius SatrioNo ratings yet
- Architects of The Coral Reef: 2006 Laser Line Scan ExpeditionDocument8 pagesArchitects of The Coral Reef: 2006 Laser Line Scan ExpeditionSOUMIL SENAPATINo ratings yet
- The Gulf of Mexico Hydrates Research ConsortiumDocument2 pagesThe Gulf of Mexico Hydrates Research ConsortiumDAT ESQUIVELNo ratings yet
- Plant Science: A Researcher's Guide ToDocument50 pagesPlant Science: A Researcher's Guide ToCoimbra RojasNo ratings yet
- 2023 MATE ROV Competition Briefing 5Document11 pages2023 MATE ROV Competition Briefing 5Omar MedhatNo ratings yet
- Artificial Island: SDM College of Engineering and Technology, Dhavalagiri, DharwadDocument17 pagesArtificial Island: SDM College of Engineering and Technology, Dhavalagiri, DharwadYogesh KhanapurNo ratings yet
- Oceans PDFDocument94 pagesOceans PDFDaniel CadenaNo ratings yet
- World-Wide Status For Harnessing OceanDocument3 pagesWorld-Wide Status For Harnessing OceanGhaleb AL-DuhniNo ratings yet
- Ihr 29 2 N04Document6 pagesIhr 29 2 N04janatb027No ratings yet
- Bathymetry Mapping For Pioneer Ship Voyages UsingDocument11 pagesBathymetry Mapping For Pioneer Ship Voyages UsinggeorgesapuleteNo ratings yet
- Scope and Sequence High School Science Marine ScienceDocument15 pagesScope and Sequence High School Science Marine SciencesaifurNo ratings yet
- Cent Rode MasaDocument11 pagesCent Rode Masamarcelo carroNo ratings yet
- AI-driven Remote Sensing Enhances Mediterranean SeDocument19 pagesAI-driven Remote Sensing Enhances Mediterranean Senadya111No ratings yet
- SAR Speckle Dependence On Ocean Surface Wind FieldDocument9 pagesSAR Speckle Dependence On Ocean Surface Wind FieldRodrigo VasconcelosNo ratings yet
- 1978-Oceanic Fronts in Coastal Processes - Proceedings of A WorkshopDocument123 pages1978-Oceanic Fronts in Coastal Processes - Proceedings of A WorkshopHsien-wen ChenNo ratings yet
- Mooring DesignDocument100 pagesMooring DesignnardjiNo ratings yet
- Biology SHE TaskDocument4 pagesBiology SHE TaskNATHASHA LAZARUSNo ratings yet
- Marine Geodesy-Karl Rinner PDFDocument50 pagesMarine Geodesy-Karl Rinner PDFFirNo ratings yet
- Mini Project: Environmental Impact Assessment of Holy Head Deep ProjectDocument13 pagesMini Project: Environmental Impact Assessment of Holy Head Deep ProjectOmike ChimaNo ratings yet
- Idea Tree Template - A172790Document1 pageIdea Tree Template - A172790Caren JasonNo ratings yet
- Papier Valentin Paru HALDocument9 pagesPapier Valentin Paru HALbarbara nicolasNo ratings yet
- ECO UN Decade SMART 20210517 PublishedDocument4 pagesECO UN Decade SMART 20210517 PublishedMichael Andreas PurwoadiNo ratings yet
- Resilient Architecture: Adaptive Community Living in Coastal LocationsDocument11 pagesResilient Architecture: Adaptive Community Living in Coastal LocationsLabdhi ShahNo ratings yet
- ProjectDocument75 pagesProjectaksht5331No ratings yet
- DAS Submarine Structural CharacterizationDocument14 pagesDAS Submarine Structural Characterizationhoniwi3818No ratings yet
- Harnessing Marine Energy by Horizontal Axis Marine TurbinesDocument8 pagesHarnessing Marine Energy by Horizontal Axis Marine TurbinesPhyo ThihabookNo ratings yet
- Energies 15 04367 v2Document28 pagesEnergies 15 04367 v2Arnaldo NMNo ratings yet
- Ocean Odyssey Educators GuideDocument90 pagesOcean Odyssey Educators Guideguinsteicy05No ratings yet
- Modeling Coral Reef Susceptibility Using GIS Multi-Criteria AnalysisDocument5 pagesModeling Coral Reef Susceptibility Using GIS Multi-Criteria Analysisabdul basitNo ratings yet
- The Advantages and Disadvantages of Space ExplorationDocument1 pageThe Advantages and Disadvantages of Space ExplorationazzouzNo ratings yet
- Srnivas ProjectDocument6 pagesSrnivas ProjectMeenugu SrinivasNo ratings yet
- Implementation of Low-Powered Multi-Sensor Buoy System For Coastal EnvironmentsDocument6 pagesImplementation of Low-Powered Multi-Sensor Buoy System For Coastal EnvironmentsTJPRC PublicationsNo ratings yet
- Coral Reef Damage Caused by The Indinurmatalia07 Grounding in Cross-Over Reef, Lemon Island of Manokwari Papua Barat ProvinceDocument8 pagesCoral Reef Damage Caused by The Indinurmatalia07 Grounding in Cross-Over Reef, Lemon Island of Manokwari Papua Barat ProvinceErsa Berliana ZanubaNo ratings yet
- Eustasy, High-Frequency Sea Level Cycles and Habitat HeterogeneityFrom EverandEustasy, High-Frequency Sea Level Cycles and Habitat HeterogeneityNo ratings yet
- Eckert Et Al 1999 General ResearchDocument12 pagesEckert Et Al 1999 General ResearchThe Science Exchange International Sea Turtle InternshipsNo ratings yet
- Komposisi Dan Pola Sebaran Makroalga Di Perairan Desa Mantang Baru, Kabupaten Bintan, Kepulauan RiauDocument10 pagesKomposisi Dan Pola Sebaran Makroalga Di Perairan Desa Mantang Baru, Kabupaten Bintan, Kepulauan RiauAlpin NtelokNo ratings yet
- HurricanesDocument25 pagesHurricanesSwayamjit MohapatraNo ratings yet
- Sea (With The Definite Article) Is The Interconnected System of The Earth'sDocument2 pagesSea (With The Definite Article) Is The Interconnected System of The Earth'sPei LingNo ratings yet
- CPL Review 01Document11 pagesCPL Review 01Plane driverNo ratings yet
- Pub. 182 North and West Coasts of Norway (Enroute), 12th Ed 2013Document271 pagesPub. 182 North and West Coasts of Norway (Enroute), 12th Ed 2013cavrisNo ratings yet
- Indian ClimateDocument7 pagesIndian ClimatePrakash Kumar Kumar100% (1)
- Cheng, Et Al 2023 Another Year of Record Heat For The OceansDocument12 pagesCheng, Et Al 2023 Another Year of Record Heat For The Oceans7leaguebootsNo ratings yet
- GomezDocument7 pagesGomezYJLNo ratings yet
- Heat Index Chart: by Temperature (F) and Relative Humidity (%)Document1 pageHeat Index Chart: by Temperature (F) and Relative Humidity (%)Olga KardashNo ratings yet
- Rosa de Viento - Madre de Dios - 08 - 2022Document1 pageRosa de Viento - Madre de Dios - 08 - 2022DAVID FREDY CHAVEZ HUERTONo ratings yet
- Hydrometeorological HazardDocument48 pagesHydrometeorological HazardMar ArizalaNo ratings yet
- LPCG Sections 1-3 PDFDocument154 pagesLPCG Sections 1-3 PDFAxyNo ratings yet
- Diversity of Macroalgae - The Journal of Tropical Life ScienceDocument4 pagesDiversity of Macroalgae - The Journal of Tropical Life ScienceOkto SupratmanNo ratings yet
- Analysis of Extreme Summers and Prior Late Winter/spring Conditions in Central EuropeDocument15 pagesAnalysis of Extreme Summers and Prior Late Winter/spring Conditions in Central EuropeMonica Ionita-ScholzNo ratings yet
- AAR-Ch02 PhysicalGeographical Characteristics of The ArcticDocument16 pagesAAR-Ch02 PhysicalGeographical Characteristics of The ArcticDavid SNo ratings yet
- CLIMATEREASONSDocument3 pagesCLIMATEREASONSBBBBNo ratings yet
- Tide Times and Charts For Bushehr, Iran and Weather Forecast For Fishing in Bushehr in 2021Document1 pageTide Times and Charts For Bushehr, Iran and Weather Forecast For Fishing in Bushehr in 2021alireza khoshnoodNo ratings yet
- Introduction To Paleoclimatic and Paleoceanographic Records in Mediterranean Sapropels and Mesozoic Black Shales'Document8 pagesIntroduction To Paleoclimatic and Paleoceanographic Records in Mediterranean Sapropels and Mesozoic Black Shales'Akrem SoltaniNo ratings yet
- Familiar Weather TopicsDocument17 pagesFamiliar Weather Topicsapi-217675974No ratings yet
- Protection of Coral Reefs in Andaman and NicobarDocument7 pagesProtection of Coral Reefs in Andaman and NicobarKavya RajuNo ratings yet
- Sea Breeze - Causes, Diagram and Effects - JotscrollDocument5 pagesSea Breeze - Causes, Diagram and Effects - JotscrollnadeemuzairNo ratings yet
- DRUMWALL A Stack of Black, Water-Filled Drums PlacedDocument3 pagesDRUMWALL A Stack of Black, Water-Filled Drums PlacedEliza Mae AquinoNo ratings yet
- Ce 7 Hydrology Precipitation QuizDocument2 pagesCe 7 Hydrology Precipitation QuizJino MancaoNo ratings yet
- Geography MA2 PPT Team EDocument15 pagesGeography MA2 PPT Team Esb210164No ratings yet
- Student Exploration: Coral Reefs 1 - Abiotic FactorsDocument13 pagesStudent Exploration: Coral Reefs 1 - Abiotic FactorsangieNo ratings yet
- Is 4651-1 - 2020Document26 pagesIs 4651-1 - 2020Kishore ChandrasekarNo ratings yet
- Climatology: Coordinator:-Asst. Prof. Gaurav GoyalDocument25 pagesClimatology: Coordinator:-Asst. Prof. Gaurav GoyalMansaNo ratings yet
- Tropical Design Module 1 PDFDocument8 pagesTropical Design Module 1 PDFgwyneth janniel syNo ratings yet
- Payao PDFDocument18 pagesPayao PDFleila DNo ratings yet
- l1 - Cold Climates and CharacteristicsDocument18 pagesl1 - Cold Climates and Characteristicsapi-253104811No ratings yet