You might also like
- A10VSO Repair ManualDocument29 pagesA10VSO Repair ManualAlexandru Ganziuc97% (30)
- K3V112DT Hydraulic Pump (SH200-3)Document20 pagesK3V112DT Hydraulic Pump (SH200-3)Hai Van92% (13)
- Caterpillar Wheel Loader Service ManualDocument11 pagesCaterpillar Wheel Loader Service ManualالمهندسوليدالطويلNo ratings yet
- CAT th103-2Document2 pagesCAT th103-2adbernego montenegroNo ratings yet
- Section 2 Structure and FunctionDocument21 pagesSection 2 Structure and FunctionالمهندسوليدالطويلNo ratings yet
- Section 2 Structure and FunctionDocument9 pagesSection 2 Structure and FunctionJose SanchezNo ratings yet
- 2 1Document21 pages2 1المهندسوليدالطويلNo ratings yet
- R55-9 1Document57 pagesR55-9 1hungNo ratings yet
- Section 2 Structure and FunctionDocument21 pagesSection 2 Structure and Functionjesus mamani mezaNo ratings yet
- Section 2 Structure and FunctionDocument20 pagesSection 2 Structure and FunctionАлексейNo ratings yet
- R480R520LC-9S 2Document22 pagesR480R520LC-9S 2abbessisayf12345No ratings yet
- Section 2 Structure and FunctionDocument6 pagesSection 2 Structure and FunctionالمهندسوليدالطويلNo ratings yet
- BOMBA HYDO EXCAVADORA HYUNDAI EX02-merged-edited PDFDocument592 pagesBOMBA HYDO EXCAVADORA HYUNDAI EX02-merged-edited PDFDarwin RoseroNo ratings yet
- Section 2 Structure and FunctionDocument20 pagesSection 2 Structure and Functiondeniden2013No ratings yet
- Section 2 Structure and FunctionDocument9 pagesSection 2 Structure and FunctionالمهندسوليدالطويلNo ratings yet
- 2-1. Structure and Function hx85x HyundaiDocument83 pages2-1. Structure and Function hx85x HyundaiAlfonso BerRamNo ratings yet
- Section 2 Structure and FunctionDocument20 pagesSection 2 Structure and FunctionالمهندسوليدالطويلNo ratings yet
- Dispositvo Da Bomba HidraulicaDocument19 pagesDispositvo Da Bomba Hidraulicamarcelo rojasNo ratings yet
- 2 1 PDFDocument20 pages2 1 PDFDavidNo ratings yet
- Section 2 Structure and Function: Group 1 Hydraulic PumpDocument8 pagesSection 2 Structure and Function: Group 1 Hydraulic PumpالمهندسوليدالطويلNo ratings yet
- 2-1 Bomba Hidráulica de Hyundai 330 LC - 9ADocument20 pages2-1 Bomba Hidráulica de Hyundai 330 LC - 9AAbel Ccahuantico champiNo ratings yet
- 2-1 Structure and FunctionDocument107 pages2-1 Structure and FunctionElectromecanica Leon Electromecanica Leon Leon100% (1)
- Enerpac L2596 GDocument108 pagesEnerpac L2596 GGabriel OniszczukNo ratings yet
- 900-DSII Hydraulic System (Oilflow Diagram)Document32 pages900-DSII Hydraulic System (Oilflow Diagram)ramadan ali100% (2)
- Hyundai 250 LCDocument20 pagesHyundai 250 LCLuis Mendez100% (1)
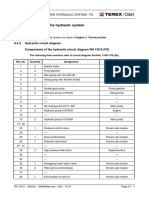
- 8.3 Description of The Hydraulic System: 8.3.1 Technical DataDocument12 pages8.3 Description of The Hydraulic System: 8.3.1 Technical DataFuad JahićNo ratings yet
- SK200-8 Component SystemDocument115 pagesSK200-8 Component Systemrezki miratzuNo ratings yet
- Hydraulic System FullDocument77 pagesHydraulic System FullSamuel Sanchez94% (36)
- Group 4 Travel Device: 1. StructureDocument17 pagesGroup 4 Travel Device: 1. Structurejefferson silvaNo ratings yet
- Section 2 Structure and Function: Group 1 Pump DeviceDocument11 pagesSection 2 Structure and Function: Group 1 Pump DeviceDado OgameNo ratings yet
- Torque Converter - Transmission PDFDocument80 pagesTorque Converter - Transmission PDFMax K.100% (1)
- L2082 Rev. G 01/20 P-80, 1006 Models With Date Code Beginning With The Letter "D". P-84 Models With Date Code Beginning With The Letter "A". IndexDocument8 pagesL2082 Rev. G 01/20 P-80, 1006 Models With Date Code Beginning With The Letter "D". P-84 Models With Date Code Beginning With The Letter "A". Indexbayo96No ratings yet
- Hino 700 Brake EquipmentDocument42 pagesHino 700 Brake Equipmentjoki marzuki100% (1)
- Hyundai R290lc-7Document7 pagesHyundai R290lc-7Elmanxd Proh100% (2)
- O-233-A1, O-235 O-235-A,-B,-Ap,-Bp-C,-C1,-C1a,-C1b,-C1c,-C2a,-C2b,-C2cDocument7 pagesO-233-A1, O-235 O-235-A,-B,-Ap,-Bp-C,-C1,-C1a,-C1b,-C1c,-C2a,-C2b,-C2csandyNo ratings yet
- Hyundai HX225S-L 2-1. Estructura y FuncionDocument97 pagesHyundai HX225S-L 2-1. Estructura y FuncionCristiam QuispeNo ratings yet
- SL 910Document4 pagesSL 910Yarisa VangeNo ratings yet
- Section 3 Power Train SystemDocument47 pagesSection 3 Power Train SystemAndré TarginoNo ratings yet
- Section 6 Work EquipmentDocument34 pagesSection 6 Work EquipmentJuan Felipe Garza GNo ratings yet
- Section 5 Steering SystemDocument13 pagesSection 5 Steering Systemoficina.eletrica65No ratings yet
- E-223 Rev22Document7 pagesE-223 Rev22Nathaniel LuraNo ratings yet
- Section 6 Work EquipmentDocument31 pagesSection 6 Work EquipmentMarco OlivettoNo ratings yet
- RENR5846 00cDocument12 pagesRENR5846 00cPauk HseinNo ratings yet
- 22A Manual TransaxleDocument14 pages22A Manual TransaxleRolly CebanesNo ratings yet
- 2-1 - BombaDocument19 pages2-1 - BombaLuis BertaoNo ratings yet
- Comatrol Catalogo MVB10 Mar18Document40 pagesComatrol Catalogo MVB10 Mar18Felipe Doria RibeiroNo ratings yet
- Ciruitos de Boom, Stick y Bucket - TextoDocument46 pagesCiruitos de Boom, Stick y Bucket - Textolalo11715100% (2)
- Technical Service Information: Nissan Re4Fo4A or Villager 4F20EDocument6 pagesTechnical Service Information: Nissan Re4Fo4A or Villager 4F20EAranza SuNo ratings yet
- NA3 AND NA4 - PARTS LISTING INDEX (p114)Document28 pagesNA3 AND NA4 - PARTS LISTING INDEX (p114)Julio BacilioNo ratings yet
- 900-DSII Hydraulic Systems Oil-Flow DiagramDocument32 pages900-DSII Hydraulic Systems Oil-Flow DiagramHdmq Parts100% (2)
- P-80 Hand Pump Parts PDFDocument8 pagesP-80 Hand Pump Parts PDFJustinNo ratings yet
- HTTP WWW - Documentation.emer... Bulletins 0029en VSFL BulDocument8 pagesHTTP WWW - Documentation.emer... Bulletins 0029en VSFL BulRktBatamNo ratings yet
- Hydraulic System.Document95 pagesHydraulic System.zae nurdinNo ratings yet
- 2-1. Structure and FunctionDocument91 pages2-1. Structure and Functionmarcelo rojas100% (1)
- Supra 1994 - 1998 S7PlusDocument5 pagesSupra 1994 - 1998 S7PlusRajibNo ratings yet
- 2.structure and FunctionDocument6 pages2.structure and FunctionDanny Reyes BohorquezNo ratings yet
- Section 5 Steering SystemDocument19 pagesSection 5 Steering SystemMarco OlivettoNo ratings yet
- Plug & & Play Play: Product ProfileDocument2 pagesPlug & & Play Play: Product Profiledavid messierNo ratings yet
- Nissan Re4Fo4A, Ford 4F20E: Accumulator Valve KitDocument2 pagesNissan Re4Fo4A, Ford 4F20E: Accumulator Valve Kitflash_24014910No ratings yet
- Fuzzy Control Systems Design and Analysis: A Linear Matrix Inequality ApproachFrom EverandFuzzy Control Systems Design and Analysis: A Linear Matrix Inequality ApproachNo ratings yet
- 3406E 550hpDocument2 pages3406E 550hpالمهندسوليدالطويلNo ratings yet
- HD 2 109c Caterpillar 3406eDocument2 pagesHD 2 109c Caterpillar 3406eالمهندسوليدالطويلNo ratings yet
- Transmicion Hyundai H439CDocument17 pagesTransmicion Hyundai H439CYoel Flores LipaNo ratings yet
- Group 2 Tightening Torque: 1. Major ComponentsDocument3 pagesGroup 2 Tightening Torque: 1. Major ComponentsالمهندسوليدالطويلNo ratings yet
- Rexroth A2VDocument20 pagesRexroth A2VالمهندسوليدالطويلNo ratings yet
- Komatsu AcronymsDocument7 pagesKomatsu Acronymsالمهندسوليدالطويل100% (4)
- Maintenance IntervalsDocument67 pagesMaintenance IntervalsHector Sanchez Garcia100% (1)
- Komatsu PW130 PDFDocument24 pagesKomatsu PW130 PDFالمهندسوليدالطويلNo ratings yet
- Putzmeister Wareparts Offer UAEDocument1 pagePutzmeister Wareparts Offer UAEالمهندسوليدالطويلNo ratings yet
- Breakout Forces Vs ConvDocument1 pageBreakout Forces Vs ConvالمهندسوليدالطويلNo ratings yet
- BP 2632 GBDocument24 pagesBP 2632 GBالمهندسوليدالطويلNo ratings yet
- BSF52 XXDocument2 pagesBSF52 XXالمهندسوليدالطويلNo ratings yet
- Komatsu PW130 PDFDocument24 pagesKomatsu PW130 PDFالمهندسوليدالطويلNo ratings yet
- BSF52 XXDocument2 pagesBSF52 XXالمهندسوليدالطويلNo ratings yet
- ZF SolenoidsDocument4 pagesZF SolenoidsDavid Rosado100% (3)
- Section 1 GeneralDocument10 pagesSection 1 GeneralالمهندسوليدالطويلNo ratings yet
- Zl60H Wheel Loader Specifications: Changlin Company LimitedDocument5 pagesZl60H Wheel Loader Specifications: Changlin Company LimitedالمهندسوليدالطويلNo ratings yet
- 4. نظام الميكاترونيكDocument30 pages4. نظام الميكاترونيكالمهندسوليدالطويلNo ratings yet
- BSF52 XXDocument2 pagesBSF52 XXالمهندسوليدالطويلNo ratings yet
- Group 4 Main Control Valve: 1. Removal and Install of MotorDocument14 pagesGroup 4 Main Control Valve: 1. Removal and Install of MotorالمهندسوليدالطويلNo ratings yet
- 1060290-The Secrets of Skyhorn Lighthouse V5-3 PDFDocument23 pages1060290-The Secrets of Skyhorn Lighthouse V5-3 PDFKevin100% (2)
- Cis 2Document6 pagesCis 2Balaji SampathNo ratings yet
- Gang of Four Java Design Patterns Gof ExamDocument76 pagesGang of Four Java Design Patterns Gof ExamsaravanaseNo ratings yet
- PLG Doctors Titles Explained PDFDocument14 pagesPLG Doctors Titles Explained PDFCamelia CalugariciNo ratings yet
- Automated Sign Language InterpreterDocument5 pagesAutomated Sign Language Interpretersruthi 98No ratings yet
- An Assessment of Fatal and Nonfatal Opioid Overdoses in Massachusetts (2011 - 2015)Document105 pagesAn Assessment of Fatal and Nonfatal Opioid Overdoses in Massachusetts (2011 - 2015)Greg SaulmonNo ratings yet
- Carti FilelistDocument260 pagesCarti FilelistBogdan Andrei TurcuNo ratings yet
- 7.62x51 Cartridge Case Feasibility Study SCAMP 1981Document118 pages7.62x51 Cartridge Case Feasibility Study SCAMP 1981Anonymous jIzz7woS6No ratings yet
- Homebrew Items - GM BinderDocument19 pagesHomebrew Items - GM BinderJhonexNo ratings yet
- Pratical 1 - MicrosDocument7 pagesPratical 1 - MicrosanthorNo ratings yet
- English Grade X Learning Activity Sheet Module 4 Lesson 1.1Document19 pagesEnglish Grade X Learning Activity Sheet Module 4 Lesson 1.1MildredNo ratings yet
- Law Course ExpectationsDocument2 pagesLaw Course ExpectationsMissKuoNo ratings yet
- Green World: The Myth of DeliveranceDocument3 pagesGreen World: The Myth of Deliveranceyathreb cherniNo ratings yet
- Design and Development of Basic Ladder Logic Programming For PLCDocument2 pagesDesign and Development of Basic Ladder Logic Programming For PLCvamkrishnaNo ratings yet
- Roots of Psychology: Ancient Greek EraDocument2 pagesRoots of Psychology: Ancient Greek Eraمہر علی حیدرNo ratings yet
- Premarital Counseling ManualDocument29 pagesPremarital Counseling ManualKwabena OtchereNo ratings yet
- Production of Acetic Acid by Methanol CarbonalyzationDocument139 pagesProduction of Acetic Acid by Methanol CarbonalyzationNoman Aslam100% (2)
- Lwe180, 200, 250Document4 pagesLwe180, 200, 250MA TotalforkliftNo ratings yet
- Bicycle Computer: ManualDocument24 pagesBicycle Computer: ManualWinexNo ratings yet
- Jeppview For Windows: General Information General InformationDocument4 pagesJeppview For Windows: General Information General InformationAfner OtnielNo ratings yet
- Full Chapter Basics of Behavior Change in Primary Care Patricia J Robinson PDFDocument53 pagesFull Chapter Basics of Behavior Change in Primary Care Patricia J Robinson PDFana.means709100% (2)
- Gianna Cordingley Module 003 229897 47915899Document2 pagesGianna Cordingley Module 003 229897 47915899api-665193969No ratings yet
- Shostakovich-Symphony No. 14 - Ang.Document9 pagesShostakovich-Symphony No. 14 - Ang.Dr. Victor Adolfo RochaNo ratings yet
- Why Is God Laughing? by Deekak Chopra - ExcerptDocument20 pagesWhy Is God Laughing? by Deekak Chopra - ExcerptCrown Publishing Group36% (22)
- Astm A376 A376m 2012Document7 pagesAstm A376 A376m 2012prabuharan89No ratings yet
- 9-Step Lesson Plan Based On Robert Gagne's ConditionsDocument14 pages9-Step Lesson Plan Based On Robert Gagne's Conditionsgisela castrellonNo ratings yet
- M-3-Formalism IDocument10 pagesM-3-Formalism ISumathi NNo ratings yet
- Media Concepts and Terminologies - REDocument17 pagesMedia Concepts and Terminologies - REManvikaNo ratings yet
- Changes in AdolescentDocument35 pagesChanges in AdolescentJunior FelipzNo ratings yet
- Post-Processing Your OVM/UVM Simulation ResultsDocument7 pagesPost-Processing Your OVM/UVM Simulation ResultsGudipalii Ravi KumarNo ratings yet