You might also like
- P1-TH-C3-2 Can Bang Cua Vat Ran Phang - English - Compatibility ModeDocument20 pagesP1-TH-C3-2 Can Bang Cua Vat Ran Phang - English - Compatibility ModeThành NhanNo ratings yet
- P1-TH-C3-2 Can Bang Cua Vat Ran Phang - English - Compatibility ModeDocument20 pagesP1-TH-C3-2 Can Bang Cua Vat Ran Phang - English - Compatibility ModeBắc Kỳ LònNo ratings yet
- P1-TH-C3-1 He Luc Phang - English - Compatibility ModeDocument11 pagesP1-TH-C3-1 He Luc Phang - English - Compatibility ModeThành NhanNo ratings yet
- Equations of EquilibriumDocument18 pagesEquations of EquilibriumSamawat AhsanNo ratings yet
- Module 2 - Force and Their CharacteristicsDocument5 pagesModule 2 - Force and Their CharacteristicsraiNo ratings yet
- P1-TH-C2 He Luc Dong Quy - CB Cua Diem - English - Compatibility ModeDocument11 pagesP1-TH-C2 He Luc Dong Quy - CB Cua Diem - English - Compatibility ModeThành NhanNo ratings yet
- Chapter 7 Statics CheckedDocument8 pagesChapter 7 Statics CheckedWan WenNo ratings yet
- P1-TH-C4-1 He Luc Khong Gian - English - Compatibility ModeDocument16 pagesP1-TH-C4-1 He Luc Khong Gian - English - Compatibility ModeThành NhanNo ratings yet
- Statics of Rigid BodiesDocument57 pagesStatics of Rigid BodiesAnna Louise WyNo ratings yet
- Moments of Forces: Vector Mechanics For Engineers: StaticsDocument32 pagesMoments of Forces: Vector Mechanics For Engineers: StaticsV-academy MathsNo ratings yet
- Engineering Mechanics 11 and 12Document97 pagesEngineering Mechanics 11 and 12Michael Vincent MirafuentesNo ratings yet
- Exportar Páginas Meriam Kraige Engineering Mechanics Statics 7th txtbk1Document1 pageExportar Páginas Meriam Kraige Engineering Mechanics Statics 7th txtbk1abrahamrv44No ratings yet
- ST 7Document13 pagesST 7yyNo ratings yet
- 2D ResultantsDocument18 pages2D Resultantsmesh.donebltchNo ratings yet
- 3.1 Basic Theory of Structural SystemDocument15 pages3.1 Basic Theory of Structural Systemyayus irmansyahNo ratings yet
- Mechanics of SolidsDocument25 pagesMechanics of Solids김정규No ratings yet
- Session 4 Force Laws I 20 21Document46 pagesSession 4 Force Laws I 20 21Luc AusterNo ratings yet
- ST 8Document12 pagesST 8yyNo ratings yet
- 1 - Statics PDFDocument15 pages1 - Statics PDFAmin PiNo ratings yet
- Engineering Mechanics - I-: Statics byDocument33 pagesEngineering Mechanics - I-: Statics byRzgar KamalNo ratings yet
- Engineering Science: StaticsDocument52 pagesEngineering Science: StaticsDRAGON LAMNo ratings yet
- 02 Class 02 Static Force AnlysisDocument18 pages02 Class 02 Static Force Anlysiskasam santhosh prathikNo ratings yet
- Correl 2 Lecture PDFDocument40 pagesCorrel 2 Lecture PDFHarf Jucoy MirandaNo ratings yet
- Chapter Four Class 9thDocument11 pagesChapter Four Class 9thAliNo ratings yet
- Damped Forced Oscillations Coupled OscillationsDocument80 pagesDamped Forced Oscillations Coupled OscillationsIrfan HadirNo ratings yet
- 161 Moments Slides AssignmentDocument30 pages161 Moments Slides AssignmentAlexander Appiah OkoreNo ratings yet
- Chapter Ii PDFDocument12 pagesChapter Ii PDFDiane Joy Fojas PanganibanNo ratings yet
- Equilibrium of Rigid BodiesDocument4 pagesEquilibrium of Rigid Bodiesjoshua villeranNo ratings yet
- Ch1 Static ForcesDocument19 pagesCh1 Static ForcesSIDDHARTH JHANo ratings yet
- L4C2 MEC420 Kinetics of Particle EOM FS2 PDFDocument14 pagesL4C2 MEC420 Kinetics of Particle EOM FS2 PDFMuhammad Danial Hakim Bin JohariNo ratings yet
- Engineering Mechanics - Unit1 - RADocument53 pagesEngineering Mechanics - Unit1 - RAgmailarun0% (1)
- Resultant of Forces SystemDocument14 pagesResultant of Forces SystemStephen ByaruhangaNo ratings yet
- Plane Motion of Rigid BodiesDocument21 pagesPlane Motion of Rigid BodiesmariaNo ratings yet
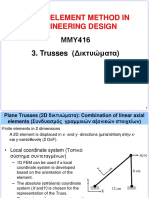
- 3 MMY416 Trusses English 2Document30 pages3 MMY416 Trusses English 2Pavlos YioukkasNo ratings yet
- Module 1.domDocument16 pagesModule 1.domAhmet ÖlmezNo ratings yet
- Equilibrium of A Rigid BodyDocument55 pagesEquilibrium of A Rigid BodyGregNo ratings yet
- Rectangular Components of ForceDocument6 pagesRectangular Components of ForceAgri EngNo ratings yet
- Equilibrium of A Rigid BodyDocument24 pagesEquilibrium of A Rigid BodyselvaNo ratings yet
- Statics 1Document2 pagesStatics 1Zack ThiemNo ratings yet
- EngineeringmechanicsDocument61 pagesEngineeringmechanicsparameshNo ratings yet
- Fundamental Principles of Mechanics: ME231: Solid Mechanics-IDocument14 pagesFundamental Principles of Mechanics: ME231: Solid Mechanics-IRohan sharmaNo ratings yet
- Theorem of The Translation of A Force To A Parallel PositionDocument3 pagesTheorem of The Translation of A Force To A Parallel Positioniko856No ratings yet
- Chapter One 1:1 Definitions: P P F FDocument47 pagesChapter One 1:1 Definitions: P P F FMohammad AbboudNo ratings yet
- ME 161 Basic Mechanics: KN US&T Kumasi-Ghana Instructor: Dr. Joshua AmpofoDocument30 pagesME 161 Basic Mechanics: KN US&T Kumasi-Ghana Instructor: Dr. Joshua AmpofosamuelNo ratings yet
- Lecture Slides 6-7Document26 pagesLecture Slides 6-7themarvelbeastNo ratings yet
- Model Formulation: MZ CZ KZ KZ MyDocument7 pagesModel Formulation: MZ CZ KZ KZ MyDiabloNo ratings yet
- MoS Lecture NotesDocument111 pagesMoS Lecture NotesMuhammad Rizwan Khan Nazir ShahNo ratings yet
- EN3: Introduction To Engineering and Statics: Force System BDocument14 pagesEN3: Introduction To Engineering and Statics: Force System BkarthikaNo ratings yet
- StaticsDocument44 pagesStaticsgangadharansridharan608No ratings yet
- Static Force AnalysisDocument56 pagesStatic Force Analysissri kiranNo ratings yet
- Chapter1 - COLYTHUYETDocument111 pagesChapter1 - COLYTHUYETTùng NguyễnNo ratings yet
- Equilibrium II: Physics 106 Lecture 8Document20 pagesEquilibrium II: Physics 106 Lecture 8riyantrin_552787272No ratings yet
- Exportar Páginas Meriam Kraige Engineering Mechanics Statics 7th Txtbk4Document1 pageExportar Páginas Meriam Kraige Engineering Mechanics Statics 7th Txtbk4abrahamrv44No ratings yet
- Pertemuan - 2: Mata Kuliah: Statika Kode: CVL - 104 SKS: 3 SksDocument26 pagesPertemuan - 2: Mata Kuliah: Statika Kode: CVL - 104 SKS: 3 Sksmufratul muslimNo ratings yet
- Equivalent Force-Couple Systems: ObjectivesDocument19 pagesEquivalent Force-Couple Systems: ObjectivesMohamaadNo ratings yet
- Equlibrium of Strings, Circular Bodies and FrictionDocument15 pagesEqulibrium of Strings, Circular Bodies and FrictionShahin MominNo ratings yet
- Lesson 1 COMPONENTSDocument6 pagesLesson 1 COMPONENTSKristine PanlilioNo ratings yet
- DOM M1 Ktunotes - in - PDFDocument34 pagesDOM M1 Ktunotes - in - PDFSarath HaridasNo ratings yet
- Unit07 Basis of A Vector Space - Part 1Document12 pagesUnit07 Basis of A Vector Space - Part 1Thành NhanNo ratings yet
- Unit03 Matrices and DeterminantsDocument34 pagesUnit03 Matrices and DeterminantsThành NhanNo ratings yet
- Unit12 Euclidean SpaceDocument18 pagesUnit12 Euclidean SpaceThành NhanNo ratings yet
- Exercises On Linear Algebra MI1036Document12 pagesExercises On Linear Algebra MI1036Thành NhanNo ratings yet
- Unit01 SetsDocument22 pagesUnit01 SetsThành NhanNo ratings yet
- P1-TH-C4-1 He Luc Khong Gian - English - Compatibility ModeDocument16 pagesP1-TH-C4-1 He Luc Khong Gian - English - Compatibility ModeThành NhanNo ratings yet
- P1-TH-C5 Ma Sat Giua Cac Vat Ran - English - Compatibility Mode PDFDocument13 pagesP1-TH-C5 Ma Sat Giua Cac Vat Ran - English - Compatibility Mode PDFThành NhanNo ratings yet
- P1-TH-C3-3 Phan Tich He Thanh Phang - English - Compatibility ModeDocument9 pagesP1-TH-C3-3 Phan Tich He Thanh Phang - English - Compatibility ModeThành NhanNo ratings yet
- P1-TH-C1 Cac Khai Niem Co Ban - English - Compatibility ModeDocument12 pagesP1-TH-C1 Cac Khai Niem Co Ban - English - Compatibility ModeThành NhanNo ratings yet
- P1-TH-C2 He Luc Dong Quy - CB Cua Diem - English - Compatibility ModeDocument11 pagesP1-TH-C2 He Luc Dong Quy - CB Cua Diem - English - Compatibility ModeThành NhanNo ratings yet
- Pneumatic Fly Ash Conveying0 PDFDocument1 pagePneumatic Fly Ash Conveying0 PDFnjc6151No ratings yet
- Ts Us Global Products Accesories Supplies New Docs Accessories Supplies Catalog916cma - PDFDocument308 pagesTs Us Global Products Accesories Supplies New Docs Accessories Supplies Catalog916cma - PDFSRMPR CRMNo ratings yet
- Test & Drain Valve Model 1000Document2 pagesTest & Drain Valve Model 1000saifahmed7No ratings yet
- CIR Vs PAL - ConstructionDocument8 pagesCIR Vs PAL - ConstructionEvan NervezaNo ratings yet
- Cryo EnginesDocument6 pagesCryo EnginesgdoninaNo ratings yet
- Oem Functional Specifications For DVAS-2810 (810MB) 2.5-Inch Hard Disk Drive With SCSI Interface Rev. (1.0)Document43 pagesOem Functional Specifications For DVAS-2810 (810MB) 2.5-Inch Hard Disk Drive With SCSI Interface Rev. (1.0)Farhad FarajyanNo ratings yet
- Apm p5 Course NotesDocument267 pagesApm p5 Course NotesMusumbulwe Sue MambweNo ratings yet
- SPH4U Assignment - The Wave Nature of LightDocument2 pagesSPH4U Assignment - The Wave Nature of LightMatthew GreesonNo ratings yet
- Rebar Coupler: Barlock S/CA-Series CouplersDocument1 pageRebar Coupler: Barlock S/CA-Series CouplersHamza AldaeefNo ratings yet
- MMC Pipe Inspection RobotDocument2 pagesMMC Pipe Inspection RobotSharad Agrawal0% (1)
- HRO (TOOLS 6-9) : Tool 6: My Family and My Career ChoicesDocument6 pagesHRO (TOOLS 6-9) : Tool 6: My Family and My Career ChoicesAkosi EtutsNo ratings yet
- HSBC in A Nut ShellDocument190 pagesHSBC in A Nut Shelllanpham19842003No ratings yet
- Specialty Arc Fusion Splicer: FSM-100 SeriesDocument193 pagesSpecialty Arc Fusion Splicer: FSM-100 SeriesSFTB SoundsFromTheBirdsNo ratings yet
- Level 3 Repair: 8-1. Block DiagramDocument30 pagesLevel 3 Repair: 8-1. Block DiagramPaulo HenriqueNo ratings yet
- Sweet Biscuits Snack Bars and Fruit Snacks in MexicoDocument17 pagesSweet Biscuits Snack Bars and Fruit Snacks in MexicoSantiagoNo ratings yet
- Draft Contract Agreement 08032018Document6 pagesDraft Contract Agreement 08032018Xylo SolisNo ratings yet
- Missouri Courts Appellate PracticeDocument27 pagesMissouri Courts Appellate PracticeGeneNo ratings yet
- Hotel ManagementDocument34 pagesHotel ManagementGurlagan Sher GillNo ratings yet
- Polytropic Process1Document4 pagesPolytropic Process1Manash SinghaNo ratings yet
- 450i User ManualDocument54 pages450i User ManualThượng Lê Văn0% (2)
- SM Land Vs BCDADocument68 pagesSM Land Vs BCDAelobeniaNo ratings yet
- Cabling and Connection System PDFDocument16 pagesCabling and Connection System PDFLyndryl ProvidoNo ratings yet
- Jerome4 Sample Chap08Document58 pagesJerome4 Sample Chap08Basil Babym100% (7)
- Engineering Management (Final Exam)Document2 pagesEngineering Management (Final Exam)Efryl Ann de GuzmanNo ratings yet
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 pageMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VNo ratings yet
- Abu Hamza Al Masri Wolf Notice of Compliance With SAMs AffirmationDocument27 pagesAbu Hamza Al Masri Wolf Notice of Compliance With SAMs AffirmationPaulWolfNo ratings yet
- Digital LiteracyDocument19 pagesDigital Literacynagasms100% (1)
- Microsoft Word - Claimants Referral (Correct Dates)Document15 pagesMicrosoft Word - Claimants Referral (Correct Dates)Michael FourieNo ratings yet
- Form Three Physics Handbook-1Document94 pagesForm Three Physics Handbook-1Kisaka G100% (1)
- What Caused The Slave Trade Ruth LingardDocument17 pagesWhat Caused The Slave Trade Ruth LingardmahaNo ratings yet