You might also like
- Immigrant Italian Stone CarversDocument56 pagesImmigrant Italian Stone Carversglis7100% (2)
- Module 2 - Resultant of Force SystemDocument17 pagesModule 2 - Resultant of Force SystemErika SiosanNo ratings yet
- MEC420 Mybook Ch2 KineticsParticles STDVDocument126 pagesMEC420 Mybook Ch2 KineticsParticles STDVKamarudinNo ratings yet
- Mechanics Introduction LectureDocument11 pagesMechanics Introduction LectureDr.Risalah A MohammedNo ratings yet
- Physics Forces PDFDocument5 pagesPhysics Forces PDFObed Alonso LlagunoNo ratings yet
- TOM NotesDocument224 pagesTOM NotesGirish SapreNo ratings yet
- 02 - Resolution of ForcesDocument10 pages02 - Resolution of ForcesMehul MunshiNo ratings yet
- Dynamics in Two DimensionsDocument105 pagesDynamics in Two DimensionsBoldie LutwigNo ratings yet
- 02 Class 02 Static Force AnlysisDocument18 pages02 Class 02 Static Force Anlysiskasam santhosh prathikNo ratings yet
- Force AnalysisDocument41 pagesForce Analysiskürşat babulNo ratings yet
- Ch1 Static ForcesDocument19 pagesCh1 Static ForcesSIDDHARTH JHANo ratings yet
- 003 Dynamics of Motion PDFDocument39 pages003 Dynamics of Motion PDFNIEVA LOU ORBOCNo ratings yet
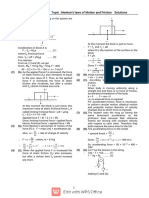
- 5-Chapter Test Newton's Laws of Motion and Friction) - SolutionsDocument3 pages5-Chapter Test Newton's Laws of Motion and Friction) - SolutionsEkendran RNo ratings yet
- Engineering Mechanics NotesDocument25 pagesEngineering Mechanics NotesSameer Sawarkar100% (1)
- 3 DynamicsDocument17 pages3 DynamicsRoselyn CarmenNo ratings yet
- First Condition of Equilibrium (Fce)Document22 pagesFirst Condition of Equilibrium (Fce)Miggy IsbertoNo ratings yet
- ForcesDocument60 pagesForcesDenay JacksonNo ratings yet
- Newtons LawDocument21 pagesNewtons LawRomeo RualesNo ratings yet
- Physics - Statics & Conservation Laws - M.GevorgyanDocument33 pagesPhysics - Statics & Conservation Laws - M.GevorgyanYuri PanosyanNo ratings yet
- Session 4 Force Laws I 20 21Document46 pagesSession 4 Force Laws I 20 21Luc AusterNo ratings yet
- PHY-433 08 Laws of MotionDocument40 pagesPHY-433 08 Laws of MotionKim OpenaNo ratings yet
- AND Classification of ForcesDocument40 pagesAND Classification of ForcesSandeep JaiswalNo ratings yet
- B16 Statics - Force Definition ClassificationDocument40 pagesB16 Statics - Force Definition ClassificationRaymart BulagsacNo ratings yet
- Laws of Motion - KS13 2021Document29 pagesLaws of Motion - KS13 2021pullagalkNo ratings yet
- Force Analysis - Basic ConceptsDocument24 pagesForce Analysis - Basic ConceptsTaylan KaraçelikNo ratings yet
- Es11 - Statics of Rigid Bodies: Prepared By: Engr. Ruth Ann D Maningding 1Document17 pagesEs11 - Statics of Rigid Bodies: Prepared By: Engr. Ruth Ann D Maningding 1Yeon JungNo ratings yet
- Topic 3 - ForceDocument14 pagesTopic 3 - Forceche syakirNo ratings yet
- Lecture Slides 6-7Document26 pagesLecture Slides 6-7themarvelbeastNo ratings yet
- 1.2 Resolution of Forces 2021Document43 pages1.2 Resolution of Forces 2021faisalazah85No ratings yet
- CH 2. Law of Motion (Phy - 1)Document67 pagesCH 2. Law of Motion (Phy - 1)kingstar122004No ratings yet
- Unit 1 Dynamics of MachineryDocument17 pagesUnit 1 Dynamics of Machineryswetha shree chavan mNo ratings yet
- P1-TH-C4-2 Can Bang Cua Vat Ran KG - He Thanh KG - English - Compatibility ModeDocument13 pagesP1-TH-C4-2 Can Bang Cua Vat Ran KG - He Thanh KG - English - Compatibility ModeThành NhanNo ratings yet
- 1 - Statics PDFDocument15 pages1 - Statics PDFAmin PiNo ratings yet
- CBSE Class 11 Physics Newton's Laws of MotionDocument79 pagesCBSE Class 11 Physics Newton's Laws of MotionMadhav LohchabNo ratings yet
- 11 Physics Notes 03 Law of MotionDocument55 pages11 Physics Notes 03 Law of MotionLokanath MishraNo ratings yet
- Module 2 - Force and Their CharacteristicsDocument5 pagesModule 2 - Force and Their CharacteristicsraiNo ratings yet
- Forces and The Laws of Motion: G9-AthsDocument25 pagesForces and The Laws of Motion: G9-AthsSalma 7assanNo ratings yet
- Mechanical Engineering Dynamics-Of-Machines Introduction NotesDocument17 pagesMechanical Engineering Dynamics-Of-Machines Introduction NotesL04 BHÀRÁTHÏ KÀÑÑÁÑNo ratings yet
- Laws of MotionDocument14 pagesLaws of MotionSiva Chaitanya SunkuNo ratings yet
- FrictionDocument10 pagesFrictionSaileen FernandesNo ratings yet
- Newton's Law of MotionDocument55 pagesNewton's Law of MotionYash WanthNo ratings yet
- OCW SKAA1213 02 Resultant and Resolution of Forces Part 1Document23 pagesOCW SKAA1213 02 Resultant and Resolution of Forces Part 1ailyn joi rodilNo ratings yet
- 學生版 Applied Mechanics II - Ch13 Force and Acceleration (Particle)Document12 pages學生版 Applied Mechanics II - Ch13 Force and Acceleration (Particle)LLANo ratings yet
- Lecture 1 Forces, Stress and StrainDocument40 pagesLecture 1 Forces, Stress and StrainKeran DiasNo ratings yet
- 15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsDocument21 pages15MEC302 Dynamics of Machines Static Force Analysis Solved ProblemsAashrith VNo ratings yet
- Chapter 4momentDocument24 pagesChapter 4momentCrisdenmar S. Dela CruzNo ratings yet
- Engineering Science: StaticsDocument52 pagesEngineering Science: StaticsDRAGON LAMNo ratings yet
- Resultant of Forces SystemDocument14 pagesResultant of Forces SystemStephen ByaruhangaNo ratings yet
- DOM M1 Ktunotes - in - PDFDocument34 pagesDOM M1 Ktunotes - in - PDFSarath HaridasNo ratings yet
- Laws of MotionDocument57 pagesLaws of MotionakinaasirNo ratings yet
- Important Terms in FrictionDocument7 pagesImportant Terms in FrictionIrmaNo ratings yet
- Summary of Chapter 6: 6.1 FrictionDocument3 pagesSummary of Chapter 6: 6.1 FrictionNano SuyatnoNo ratings yet
- 3-Dynamics of Particles A-Forces: BibliographyDocument14 pages3-Dynamics of Particles A-Forces: BibliographymaitesecoNo ratings yet
- P1-TH-C3-1 He Luc Phang - English - Compatibility ModeDocument11 pagesP1-TH-C3-1 He Luc Phang - English - Compatibility ModeThành NhanNo ratings yet
- CMCH 05Document39 pagesCMCH 05cychan410No ratings yet
- Ampli-Fire Classes (: Laws of MotionDocument53 pagesAmpli-Fire Classes (: Laws of MotionAditya PathakNo ratings yet
- DOM Airwalk Module 1 PDFDocument34 pagesDOM Airwalk Module 1 PDFMuhammed SabeehNo ratings yet
- Lecture 2 - Supp SlidesDocument1 pageLecture 2 - Supp SlidesCATIA BACKUPNo ratings yet
- Statics - Chapter 5Document12 pagesStatics - Chapter 5Abdulraof MatturNo ratings yet
- L5C2 MEC420 Kinetics of Particle Energy FS2 PDFDocument21 pagesL5C2 MEC420 Kinetics of Particle Energy FS2 PDFMuhammad Danial Hakim Bin JohariNo ratings yet
- L6C2 MEC420 Kinetics of Particle Momentum FS2 PDFDocument15 pagesL6C2 MEC420 Kinetics of Particle Momentum FS2 PDFMuhammad Danial Hakim Bin JohariNo ratings yet
- L2C1 MEC420 1D Kinematics of Particle FS2 PDFDocument30 pagesL2C1 MEC420 1D Kinematics of Particle FS2 PDFMuhammad Danial Hakim Bin JohariNo ratings yet
- MEC411 Chapter 1 Stress Strain ConceptDocument26 pagesMEC411 Chapter 1 Stress Strain ConceptMuhammad Danial Hakim Bin JohariNo ratings yet
- Assignment 1Document3 pagesAssignment 1farhang_tNo ratings yet
- VBAC MCQsDocument3 pagesVBAC MCQsHanaNo ratings yet
- Assignment 2 Mat435Document2 pagesAssignment 2 Mat435Arsene LupinNo ratings yet
- Curriculum Vitae - RadikaDocument3 pagesCurriculum Vitae - RadikaradikahendryNo ratings yet
- Crouse Hinds XPL Led BrochureDocument12 pagesCrouse Hinds XPL Led BrochureBrayan Galaz BelmarNo ratings yet
- Data Bulletin Group Motor Installations:: Understanding National Electrical Code (NEC) 430.53 RequirementsDocument8 pagesData Bulletin Group Motor Installations:: Understanding National Electrical Code (NEC) 430.53 RequirementsshoaibNo ratings yet
- Module 1 Notes The White Bird Reading The Image Painting Analysis PDFDocument4 pagesModule 1 Notes The White Bird Reading The Image Painting Analysis PDFMelbely Rose Apigo BaduaNo ratings yet
- Hopeless PlacesDocument1,304 pagesHopeless Placesmoreblessingmarvellous659No ratings yet
- Mahindra & MahindraDocument13 pagesMahindra & MahindraAbhishek DharmadhikariNo ratings yet
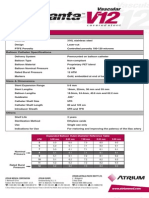
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiNo ratings yet
- Murata High Voltage CeramicDocument38 pagesMurata High Voltage CeramictycristinaNo ratings yet
- Ensemble Averaging (Machine Learning)Document3 pagesEnsemble Averaging (Machine Learning)emma698No ratings yet
- Assignment Booklet July 2021Document22 pagesAssignment Booklet July 2021Saksham TiwariNo ratings yet
- Contemporary Philippine Arts From The Regions: Quarter 2 - Module 9 Different Contemporary Art Techniques and PerformanceDocument25 pagesContemporary Philippine Arts From The Regions: Quarter 2 - Module 9 Different Contemporary Art Techniques and PerformanceGrace06 Labin100% (7)
- Fyp-Hydraulic Brakes CompleteDocument32 pagesFyp-Hydraulic Brakes CompleteRishabh JainNo ratings yet
- Provision of EPCI Services For EPCIC Sidayu Wellhead Platforms and Pipelines Sidayu Field DevelopmentDocument7 pagesProvision of EPCI Services For EPCIC Sidayu Wellhead Platforms and Pipelines Sidayu Field Developmentriandi100% (1)
- Curing Obesity, WorldwideDocument6 pagesCuring Obesity, WorldwideHernán SanabriaNo ratings yet
- Kindergarten Math Problem of The Day December ActivityDocument5 pagesKindergarten Math Problem of The Day December ActivityiammikemillsNo ratings yet
- Basic Geriatric Nursing 6th Edition Williams Test BankDocument10 pagesBasic Geriatric Nursing 6th Edition Williams Test Bankmaryrodriguezxsntrogkwd100% (49)
- Shandong Baoshida Cable Co, LTD.: Technical ParameterDocument3 pagesShandong Baoshida Cable Co, LTD.: Technical ParameterkmiqdNo ratings yet
- Pediatric EmergenciesDocument47 pagesPediatric EmergenciesahmedNo ratings yet
- Module-4 (PDFDrive)Document67 pagesModule-4 (PDFDrive)Divya priya KNo ratings yet
- De Vault 1996Document22 pagesDe Vault 1996Harumi OONo ratings yet
- Piriformis Syndrome: Hardi Adiyatma, Shahdevi Nandar KusumaDocument6 pagesPiriformis Syndrome: Hardi Adiyatma, Shahdevi Nandar Kusumaismael wandikboNo ratings yet
- Dual Op Amp and Voltage Reference Ap4310/ADocument12 pagesDual Op Amp and Voltage Reference Ap4310/AМихаил ЯненкоNo ratings yet
- Presentation On 4G TechnologyDocument23 pagesPresentation On 4G TechnologyFresh EpicNo ratings yet
- Combined Shear and TensionDocument16 pagesCombined Shear and TensionDAN MARK OPONDANo ratings yet
- RACI Matrix Design For Managing Stakeholders in PRDocument12 pagesRACI Matrix Design For Managing Stakeholders in PRRheza Nugraha Prabareswara100% (1)
- Soldier of Fortune PDFDocument208 pagesSoldier of Fortune PDFNixel SpielNo ratings yet