You might also like
- 3D Dynamics: Presented By: Amir Patel PHD (Mechatronics) Cape TownDocument23 pages3D Dynamics: Presented By: Amir Patel PHD (Mechatronics) Cape TownDaniel JonesNo ratings yet
- Lagrange Mechanics I: Presented By: Amir Patel PHD (Mechatronics) Cape TownDocument29 pagesLagrange Mechanics I: Presented By: Amir Patel PHD (Mechatronics) Cape TownDaniel JonesNo ratings yet
- Lagrange Mechanics II: 20 February 2023Document31 pagesLagrange Mechanics II: 20 February 2023Daniel JonesNo ratings yet
- TD_Mover_solutionDocument13 pagesTD_Mover_solution69iichNo ratings yet
- 课件1Document17 pages课件1Alex WangNo ratings yet
- 9 - ParameterizationDocument48 pages9 - Parameterizationandriusjaya787No ratings yet
- Course 4 Modeling of Dynamic Systems in FDDocument23 pagesCourse 4 Modeling of Dynamic Systems in FDCend AkhinovNo ratings yet
- R4-Forward and Inverse KinematicsDocument31 pagesR4-Forward and Inverse Kinematicsahmod202120No ratings yet
- Dynamics FULL Equation SheetDocument2 pagesDynamics FULL Equation SheetZachNo ratings yet
- 6 Root LocusDocument52 pages6 Root LocusDogukan KarabeyinNo ratings yet
- Checklist of Learning and Understanding: Chapter 1: AlgebraDocument9 pagesChecklist of Learning and Understanding: Chapter 1: AlgebraNazmul HassanNo ratings yet
- CHAPTER 3 KINEMATICS OF RIGID BODIES 2DDocument55 pagesCHAPTER 3 KINEMATICS OF RIGID BODIES 2D2021839932No ratings yet
- Elementary Functions and Transformation of Functions: Bernadeth C. VillanuevaDocument38 pagesElementary Functions and Transformation of Functions: Bernadeth C. Villanuevabernadeth villanuevaNo ratings yet
- Rigid BodiesDocument68 pagesRigid BodiesAmon RoyNo ratings yet
- The Nonholonomy of the Rolling SphereDocument25 pagesThe Nonholonomy of the Rolling SphereAmino fileNo ratings yet
- 1.0 Atomic StructureDocument37 pages1.0 Atomic StructureRustin PurplemanNo ratings yet
- Physics 210: Solution of The Nonlinear Pendulum Equation Using FdasDocument40 pagesPhysics 210: Solution of The Nonlinear Pendulum Equation Using Fdaschaimae daliNo ratings yet
- Exam Examples Questions With SolutionDocument9 pagesExam Examples Questions With Solutionteektak1No ratings yet
- Course 10 - Laplace 2Document32 pagesCourse 10 - Laplace 2ali fulanNo ratings yet
- Physic 1 Midterm Review - By Mr NamDocument30 pagesPhysic 1 Midterm Review - By Mr Nam11Sinh1-16-Nguyễn Phúc QuangNo ratings yet
- Motion in A Straight Line JEE EnzzDocument64 pagesMotion in A Straight Line JEE EnzzfailurewasteworthlessNo ratings yet
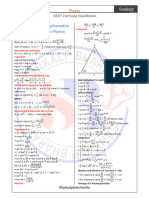
- Physics Formula Handbook (1)Document54 pagesPhysics Formula Handbook (1)3198chethaNo ratings yet
- Rigid Body Dynamics SimulationDocument5 pagesRigid Body Dynamics SimulationstevecraigNo ratings yet
- SHM VJSir 08Document74 pagesSHM VJSir 08Atharva WatekarNo ratings yet
- AM-4 FinalDocument45 pagesAM-4 FinalChandan KumarNo ratings yet
- ES386 Slides 06 n DOF lecture (2)Document28 pagesES386 Slides 06 n DOF lecture (2)jimawsd569No ratings yet
- Chapter 5 SHMDocument67 pagesChapter 5 SHMaiman khuzairiNo ratings yet
- Rotational Systems LabDocument4 pagesRotational Systems LabAlejandra M. AvilaNo ratings yet
- Simon Chapter 3Document12 pagesSimon Chapter 3shreyas srNo ratings yet
- Calculating Kinds of IntegralsDocument8 pagesCalculating Kinds of IntegralsBún CáNo ratings yet
- Continuous Stochastic ProcessDocument9 pagesContinuous Stochastic ProcessSoumya Sankar ChakrabortyNo ratings yet
- Short Notes of Mechanical Metallurgy Lyst1252Document9 pagesShort Notes of Mechanical Metallurgy Lyst1252harsh khawasNo ratings yet
- Robotics Course: LR02.3:: 3 Dimensional Homogenous TransformationDocument17 pagesRobotics Course: LR02.3:: 3 Dimensional Homogenous TransformationThiha Ye ThwayNo ratings yet
- Energy and Reaction ForcesDocument9 pagesEnergy and Reaction ForcesPhilani XabaNo ratings yet
- ME 563 HOMEWORK # 1 (Solutions) Fall 2010: PROBLEM 1: (40%)Document11 pagesME 563 HOMEWORK # 1 (Solutions) Fall 2010: PROBLEM 1: (40%)M Willy TarmidziNo ratings yet
- Orbital Mechanics Cheat SheetDocument3 pagesOrbital Mechanics Cheat SheetRodolfo SotoNo ratings yet
- Rotational MotionDocument4 pagesRotational MotionWraith KingNo ratings yet
- Mathematics NotesDocument3 pagesMathematics Notespicnic dayNo ratings yet
- Symmetry and Conservation LawsDocument48 pagesSymmetry and Conservation Lawshjprast7591No ratings yet
- Neo Neet 11 p1 Phy H Motion in 1d s08Document67 pagesNeo Neet 11 p1 Phy H Motion in 1d s08gecbchebbecbebvebNo ratings yet
- ME 212 Dynamics Lecture Notes: Part A: Particle KinematicsDocument21 pagesME 212 Dynamics Lecture Notes: Part A: Particle KinematicsIan Van SciverNo ratings yet
- Civil Lect 3 - Propert of Plane Area 2017Document29 pagesCivil Lect 3 - Propert of Plane Area 2017Abdelhay Mohamed HassanNo ratings yet
- Math Study Group (1)Document13 pagesMath Study Group (1)JustinNo ratings yet
- FD Lab4Document13 pagesFD Lab4Carlos RodríguezNo ratings yet
- Equation SheetDocument2 pagesEquation SheetStevenNo ratings yet
- Linear Algebra Unit 2Document61 pagesLinear Algebra Unit 2Scout opNo ratings yet
- MDR PDFDocument34 pagesMDR PDFJohnNo ratings yet
- QAB SSN 1 Updated For StudentsDocument31 pagesQAB SSN 1 Updated For Studentslyw3178No ratings yet
- Robot DesignDocument37 pagesRobot DesignengineerNo ratings yet
- Setting VPO in FNDocument13 pagesSetting VPO in FNThavanayagam EalasukanthanNo ratings yet
- Math Fundamentals: 1. Conventions and Definitions 2. Matrices 3. Fundamentals of Rigid TransformsDocument29 pagesMath Fundamentals: 1. Conventions and Definitions 2. Matrices 3. Fundamentals of Rigid TransformsZaidKhanNo ratings yet
- Lec 18Document15 pagesLec 18stathiss11No ratings yet
- S7 BetDocument12 pagesS7 BetNicolas Grajales MontotaNo ratings yet
- Mechanics V: Rotation: 1 2D Rotational KinematicsDocument15 pagesMechanics V: Rotation: 1 2D Rotational Kinematics66 SB jay gotiNo ratings yet
- Lecture 37Document11 pagesLecture 37Shahbaz AhmadNo ratings yet
- Mass Transfer Equations in Solids and LiquidsDocument16 pagesMass Transfer Equations in Solids and LiquidsRadwan Ayman100% (1)
- Transverse and Longitudinal Vibration: The Equation of Motion Becomes: ̈ + 0 ̈ + 0Document7 pagesTransverse and Longitudinal Vibration: The Equation of Motion Becomes: ̈ + 0 ̈ + 0Mugdho HossainNo ratings yet
- Deflection of Beams: Geometric MethodDocument47 pagesDeflection of Beams: Geometric MethodfrancessichNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- CML4607F 2019 Test 1 - ONLY QUESTIONSDocument9 pagesCML4607F 2019 Test 1 - ONLY QUESTIONSDaniel JonesNo ratings yet
- CML4607F 2022 Scenario AnswersDocument24 pagesCML4607F 2022 Scenario AnswersDaniel JonesNo ratings yet
- CML4607F 2022 Test 1Document10 pagesCML4607F 2022 Test 1Daniel JonesNo ratings yet
- CML4607F 2021 Test - ONLY QUESTIONSDocument13 pagesCML4607F 2021 Test - ONLY QUESTIONSDaniel JonesNo ratings yet
- CML4607F 2022 Test 1 SolutionsDocument1 pageCML4607F 2022 Test 1 SolutionsDaniel JonesNo ratings yet
- Numerical Integration: Presented By: Amir Patel PHD (Mechatronics) Cape TownDocument40 pagesNumerical Integration: Presented By: Amir Patel PHD (Mechatronics) Cape TownDaniel JonesNo ratings yet
- Lecture 2a Automation Scope 2023 KSBDocument21 pagesLecture 2a Automation Scope 2023 KSBDaniel JonesNo ratings yet
- Lecture 2b P - ID 2023Document34 pagesLecture 2b P - ID 2023Daniel JonesNo ratings yet
- EEE4118 Lecture 3 Control and Operability 2023Document37 pagesEEE4118 Lecture 3 Control and Operability 2023Daniel JonesNo ratings yet
- Lecture 1 Automation Intro 2023Document11 pagesLecture 1 Automation Intro 2023Daniel JonesNo ratings yet
- EEE4118 Lecture 4 PLC and SCADA 2023Document46 pagesEEE4118 Lecture 4 PLC and SCADA 2023Daniel JonesNo ratings yet
- SPM 097Document2 pagesSPM 097Benito CelestinNo ratings yet
- Minimum Learning Material (XII)Document6 pagesMinimum Learning Material (XII)Abhi VarnaNo ratings yet
- Valve Market Report ESADocument53 pagesValve Market Report ESAAshwin KumarNo ratings yet
- Distribution System Engineering ECE668Document56 pagesDistribution System Engineering ECE668Chan DavidNo ratings yet
- Notes On EnergyDocument5 pagesNotes On EnergyMoodely RuskynNo ratings yet
- Direct Injection and Ignition System (4-Cyl 1 8 LTR 2 0 LTR 4-Valve Turbo - Generation III)Document70 pagesDirect Injection and Ignition System (4-Cyl 1 8 LTR 2 0 LTR 4-Valve Turbo - Generation III)ergdegNo ratings yet
- 2016 Summer Model Answer PaperDocument17 pages2016 Summer Model Answer PaperAbhishek ChavanNo ratings yet
- Fuaadi 1991Document19 pagesFuaadi 1991jalestNo ratings yet
- 100% Clean, Renewable Energy and Storage For Everything: Mark Z. Jacobson Stanford UniversityDocument79 pages100% Clean, Renewable Energy and Storage For Everything: Mark Z. Jacobson Stanford UniversityYama AsEelNo ratings yet
- Learn CBSE: Social Science Class 10 Important Questions Geography Chapter 1 Resources and DevelopmentDocument27 pagesLearn CBSE: Social Science Class 10 Important Questions Geography Chapter 1 Resources and DevelopmentAnalytical Fincon Pvt. Ltd.No ratings yet
- Energy Recharge Calculator - Energy Recharge CalculatorDocument12 pagesEnergy Recharge Calculator - Energy Recharge Calculatorsubit timalsinaNo ratings yet
- Access, Read & Erase Engine Trouble Codes 2.7tdiDocument3 pagesAccess, Read & Erase Engine Trouble Codes 2.7tdimorusNo ratings yet
- Phy c3.1-3.5 Past PaperDocument53 pagesPhy c3.1-3.5 Past Papersap15whcNo ratings yet
- FulltextDocument113 pagesFulltextColleen MurphyNo ratings yet
- SF350M (BF) 60-CELL LINE MADE IN ITALY MONOCRYSTALLINE SOLAR PANELDocument2 pagesSF350M (BF) 60-CELL LINE MADE IN ITALY MONOCRYSTALLINE SOLAR PANELAntoine BainNo ratings yet
- DraftDocument1 pageDraftAmmar Lateef GakharNo ratings yet
- Ahya - PK Issue Brief 2023Document36 pagesAhya - PK Issue Brief 2023saad.ahmed00012No ratings yet
- SUPER 1803-3 EN 2509980 MPW 1117Document22 pagesSUPER 1803-3 EN 2509980 MPW 1117chintia nugraheniNo ratings yet
- For Turbine: T T T T T TDocument1 pageFor Turbine: T T T T T TZakir HussainNo ratings yet
- MYP 4 Physics Syllabus 2022-2023Document1 pageMYP 4 Physics Syllabus 2022-2023azypazzyNo ratings yet
- Steam Turbine Equipment List and StatusDocument6 pagesSteam Turbine Equipment List and StatusFarooq Ahmed Amir ChaudhryNo ratings yet
- Example 1: P =10ηQH = 10 (0.83) (0.01) (25) = 2.075 P=2.1 kWDocument4 pagesExample 1: P =10ηQH = 10 (0.83) (0.01) (25) = 2.075 P=2.1 kWmartazemeduNo ratings yet
- View All Callouts: Function Isolation ToolsDocument9 pagesView All Callouts: Function Isolation Toolselectroautomotriz electroNo ratings yet
- MTK MID SEM-2 ReviewDocument16 pagesMTK MID SEM-2 ReviewSubhodeep SadhuNo ratings yet
- Shell and Tube Heat ExchangerDocument6 pagesShell and Tube Heat Exchangeradil alameenNo ratings yet
- Owner Manual Welding Machine Mil - 800 Duo AirpackDocument104 pagesOwner Manual Welding Machine Mil - 800 Duo AirpackRifki Dwi ArdiantoNo ratings yet
- Weatherford Casing PatchDocument8 pagesWeatherford Casing PatchhijoetigreNo ratings yet
- Specification and Maintenance Manual: Sequence Flashing Lights (SFL)Document13 pagesSpecification and Maintenance Manual: Sequence Flashing Lights (SFL)Javier Eduardo Alzate BogotaNo ratings yet
- CR4000 Series Service Regulators: Technical BulletinDocument5 pagesCR4000 Series Service Regulators: Technical BulletinFRANKLIN RAMIREZNo ratings yet
- FIMSUP Double Rows Graphite Sealing For Rotary KilnDocument4 pagesFIMSUP Double Rows Graphite Sealing For Rotary KilnFurqan ShabbirNo ratings yet