You might also like
- An Insight Into Magneto Rheological DampersDocument239 pagesAn Insight Into Magneto Rheological DampersashutoshmanchandaNo ratings yet
- BLDC MotorDocument241 pagesBLDC MotorCatalin StefanNo ratings yet
- 01-Thermodynamic Process (Theory)Document35 pages01-Thermodynamic Process (Theory)mechanical_lecturer100% (1)
- Road Load DataDocument146 pagesRoad Load DataacroloidNo ratings yet
- FSAE PowerTrain Phase 4 NNDocument80 pagesFSAE PowerTrain Phase 4 NNAnonymous NK2QBE9oNo ratings yet
- Steering Universal JointsDocument11 pagesSteering Universal JointsAman JainNo ratings yet
- Analysis of Permanent Magnet Synchronous MotorDocument15 pagesAnalysis of Permanent Magnet Synchronous Motormalini72No ratings yet
- Sae Technical Paper Series: Lonny L. Thompson, Jon K. Lampert and E. Harry LawDocument12 pagesSae Technical Paper Series: Lonny L. Thompson, Jon K. Lampert and E. Harry LawSrikanth SridharanNo ratings yet
- Development of An Auto Rickshaw Suspension SystemDocument125 pagesDevelopment of An Auto Rickshaw Suspension Systemmawais15No ratings yet
- Electric DrivesDocument91 pagesElectric DrivesS.m. FerdousNo ratings yet
- T00112 Understanding Startup and Shutdown TransientsDocument20 pagesT00112 Understanding Startup and Shutdown TransientsLe Thanh HaiNo ratings yet
- Design of Synchronous MachinesDocument17 pagesDesign of Synchronous MachinesNiteshNarukaNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- FSAE Drivetrain Final PresentationDocument38 pagesFSAE Drivetrain Final PresentationAndreea CotunNo ratings yet
- All Types of Cable Lugs ManufacturerDocument4 pagesAll Types of Cable Lugs ManufacturerUjjwal ShahNo ratings yet
- Principles of A Permanent-Magnet Axial-Field D.CDocument6 pagesPrinciples of A Permanent-Magnet Axial-Field D.CHoang Hoang LeNo ratings yet
- Plano Schematic 3516 A3 PDFDocument2 pagesPlano Schematic 3516 A3 PDFYessika AliendresNo ratings yet
- Design and Analysis of Crankshaft For Internal Combustion EngineDocument5 pagesDesign and Analysis of Crankshaft For Internal Combustion EngineEditor IJTSRDNo ratings yet
- 2.review of Literature and Statement of ProblemDocument6 pages2.review of Literature and Statement of ProblemsheriabhiNo ratings yet
- Vibration of Marine Diesel Engine Foundation: December 2011Document11 pagesVibration of Marine Diesel Engine Foundation: December 2011acar1100% (1)
- GearboxDocument6 pagesGearboxedhy_03No ratings yet
- Function GeneratorDocument12 pagesFunction Generatordineshpadhiyar0% (1)
- ANSYS Tutorial Design OptimizationDocument9 pagesANSYS Tutorial Design OptimizationSimulation CAE100% (4)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Analysis of Exhaust Manifold Using Computational Fluid Dynamics Fmoa 1000129Document16 pagesAnalysis of Exhaust Manifold Using Computational Fluid Dynamics Fmoa 1000129Andrés Edisson Águila100% (1)
- Current Signature AnalysisDocument2 pagesCurrent Signature AnalysisbejomindNo ratings yet
- Hexply 8552 DatasheetDocument6 pagesHexply 8552 DatasheetMuhammad KhyzerNo ratings yet
- 1 Electric Motor BasicsDocument13 pages1 Electric Motor BasicsPandaGendutNo ratings yet
- Cjob TutorialDocument28 pagesCjob TutorialCelia ThomasNo ratings yet
- Rotor Dynamics v14 Open Days Feb 2012Document46 pagesRotor Dynamics v14 Open Days Feb 2012Sunil VermaNo ratings yet
- Man Instr DPS110Document100 pagesMan Instr DPS110Agus SulistioNo ratings yet
- N Vasilesco-Karpen - Pile Permanente - FR577087A en PDFDocument3 pagesN Vasilesco-Karpen - Pile Permanente - FR577087A en PDFAlexandru DragomirNo ratings yet
- A Review of Structural and Thermal Analysis of Traction MotorsDocument11 pagesA Review of Structural and Thermal Analysis of Traction MotorsGari PastranaNo ratings yet
- Ansys NVH Solutions For Electric Vehicles Whitepaper PDFDocument6 pagesAnsys NVH Solutions For Electric Vehicles Whitepaper PDFRajeshNo ratings yet
- Wound Rotor Motor TestingDocument5 pagesWound Rotor Motor Testingbige1911No ratings yet
- ABB - General Purpose Motors Cast Iron - GB 092003Document49 pagesABB - General Purpose Motors Cast Iron - GB 092003ivanjaviergutierrezoNo ratings yet
- Unit 3 SRMDocument66 pagesUnit 3 SRMDr SriNo ratings yet
- Thesis On Ball BearingsDocument196 pagesThesis On Ball BearingsSudheer Reddy TenaliNo ratings yet
- DynamometerDocument4 pagesDynamometerMohammad Zia Nasir BhuttaNo ratings yet
- MEC322 Chapter 7 - TORQUE & POWER MEASUREMENTDocument19 pagesMEC322 Chapter 7 - TORQUE & POWER MEASUREMENTAiman ArhamNo ratings yet
- Structural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyDocument3 pagesStructural Analysis of Three Stage Coupled Planetary Gear Train and Determination of EfficiencyInnovative Research PublicationsNo ratings yet
- PMBLDC Motor DriveDocument55 pagesPMBLDC Motor DriveSushant SinghNo ratings yet
- Vehicul HybridDocument89 pagesVehicul Hybridmihai_1957No ratings yet
- Gearbox RadiationDocument44 pagesGearbox RadiationTheLizardKingNo ratings yet
- Rotordynamic Analysis Using ANSYS Mechanical APDL With The Rotor Modeled by Beam ElementDocument7 pagesRotordynamic Analysis Using ANSYS Mechanical APDL With The Rotor Modeled by Beam Elementmick.pride81No ratings yet
- ISO 10816 6 1995 en PreviewDocument5 pagesISO 10816 6 1995 en Previewblacx_rzkyNo ratings yet
- TOMAS UsersManualDocument94 pagesTOMAS UsersManualrodruren01No ratings yet
- POWERTRAINDocument15 pagesPOWERTRAINIan Harvey MendozaNo ratings yet
- Design Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEADocument5 pagesDesign Optimization of Brushless Permanent Magnet Hub Motor Drive Using FEASuman SahaNo ratings yet
- DynamometerDocument7 pagesDynamometerGaurav S PatilNo ratings yet
- Test Rig For Shock AbsorberDocument15 pagesTest Rig For Shock AbsorberRajaSekarsajja100% (1)
- 101 Ways Extract Modal Parameters Which Is One Me PDFDocument13 pages101 Ways Extract Modal Parameters Which Is One Me PDFValentino de GeorgeNo ratings yet
- Regenerative Braking SystemDocument6 pagesRegenerative Braking SystemVivek SinghNo ratings yet
- Engine Mounts and Powertrain Mounting SystemsDocument22 pagesEngine Mounts and Powertrain Mounting SystemsErdiner ParmaksızNo ratings yet
- Bump TestDocument3 pagesBump TestPiu BhaNo ratings yet
- Structural and Thermal Analysis of An Exhaust Manifold of A Multi Cylinder Engine IJERTCONV3IS10016 PDFDocument4 pagesStructural and Thermal Analysis of An Exhaust Manifold of A Multi Cylinder Engine IJERTCONV3IS10016 PDFKarthikNo ratings yet
- The Physics of Suspensions Using Computer SimulationDocument7 pagesThe Physics of Suspensions Using Computer SimulationEric TendianNo ratings yet
- Lipo PDFDocument11 pagesLipo PDFjalilemadiNo ratings yet
- Gearbox Health Condition Monitoring A Brief ExpositionDocument11 pagesGearbox Health Condition Monitoring A Brief ExpositionSetti SureshNo ratings yet
- Bma4723 Vehicle Dynamics Chap 5Document31 pagesBma4723 Vehicle Dynamics Chap 5Fu HongNo ratings yet
- Tutorial 4Document3 pagesTutorial 4snoozermanNo ratings yet
- Study For Design of Magneto Rheological DamperDocument8 pagesStudy For Design of Magneto Rheological DamperAnonymous lPvvgiQjRNo ratings yet
- Crankshaft Torsional Vibration ReferenceDocument3 pagesCrankshaft Torsional Vibration ReferenceSakthiVel RamuNo ratings yet
- Configuring STPDocument4 pagesConfiguring STPFrija011No ratings yet
- Lavadora LG WD-3274RHD Manual de ServicioDocument43 pagesLavadora LG WD-3274RHD Manual de Serviciogandaras69832653No ratings yet
- Vijayaniki Aidu Metlu PDFDocument4 pagesVijayaniki Aidu Metlu PDFSandeep KarriNo ratings yet
- Philips 715g3308-1 32pfl5404 PsuDocument4 pagesPhilips 715g3308-1 32pfl5404 PsuFonos ServisNo ratings yet
- TCM3.1L LA 32PFL3404''77 - 32PFL3404''78 - 42PFL3604''77 - 42PFL3604''78 - Esquema Elétrico de Fonte PDFDocument3 pagesTCM3.1L LA 32PFL3404''77 - 32PFL3404''78 - 42PFL3604''77 - 42PFL3604''78 - Esquema Elétrico de Fonte PDFcarlosNo ratings yet
- PCBs Layout Guidelines For RF & Mixed-Signal - Analog DevicesDocument10 pagesPCBs Layout Guidelines For RF & Mixed-Signal - Analog DevicesSB GAYENNo ratings yet
- Inductive & Magnetic Type Electrical Speed Sensor Complete ConceptDocument3 pagesInductive & Magnetic Type Electrical Speed Sensor Complete ConceptПетр СотниковNo ratings yet
- Knee Point Voltage of Current Transformer PS ClassDocument4 pagesKnee Point Voltage of Current Transformer PS ClassMang PorongNo ratings yet
- Multi-Core Processor PDFDocument6 pagesMulti-Core Processor PDFFaiqa mehboobNo ratings yet
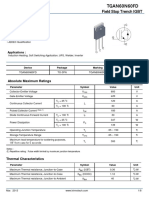
- Field Stop Trench IGBT: Absolute Maximum RatingsDocument8 pagesField Stop Trench IGBT: Absolute Maximum RatingsHeru susantoNo ratings yet
- Rele 5vDocument5 pagesRele 5vinma58633No ratings yet
- Alstom Grid Micom S1 Agile V1.1 Upgrade Available - 261113Document7 pagesAlstom Grid Micom S1 Agile V1.1 Upgrade Available - 261113abdulyunus_amirNo ratings yet
- Problem Set Solutions Chapter 7, Quantum Chemistry, 5 Ed., LevineDocument10 pagesProblem Set Solutions Chapter 7, Quantum Chemistry, 5 Ed., LevineSabellano Loven RalphNo ratings yet
- Twin Disc - EC250 - 2016-227Document2 pagesTwin Disc - EC250 - 2016-227Funda HandasNo ratings yet
- Datasheet Vikram Solar Multi Crystalline 72 Cell IndiaDocument2 pagesDatasheet Vikram Solar Multi Crystalline 72 Cell Indiasteffi subaNo ratings yet
- Summary of Routine TestsDocument1 pageSummary of Routine TestsLuis AndradeNo ratings yet
- M04-004 RevC NetworkManagement Brochure 17x11Document2 pagesM04-004 RevC NetworkManagement Brochure 17x11Víctor MayaNo ratings yet
- Mps LGDocument178 pagesMps LGkikiuNo ratings yet
- Source Free RL CircuitDocument5 pagesSource Free RL CircuitAnonymous yO7rcec6vuNo ratings yet
- Electric Plugs Per Country PDFDocument4 pagesElectric Plugs Per Country PDFandrei_bertea7771No ratings yet
- Product Catalogue: 1 Subject To Change Without NoticeDocument35 pagesProduct Catalogue: 1 Subject To Change Without NoticeKassou ZakNo ratings yet
- 4c AlfaRomeo Spec Sheet UsDocument5 pages4c AlfaRomeo Spec Sheet UsSashi VelnatiNo ratings yet
- Lead-Acid Fast-Charge IC: FeaturesDocument17 pagesLead-Acid Fast-Charge IC: FeaturesmoannaNo ratings yet
- Rfic Unit 3: BY Blessina Preethi R, Asso, Professor, SvpcetDocument31 pagesRfic Unit 3: BY Blessina Preethi R, Asso, Professor, SvpcetBlessina PreethiNo ratings yet