You might also like
- Ham Radio For The New Ham What To Do The Minute You Get Your Amateur Radio License - Stan MerrillDocument137 pagesHam Radio For The New Ham What To Do The Minute You Get Your Amateur Radio License - Stan Merrillteletim482050% (2)
- WirelessHART - Implementation and Evaluation On Wireless SensorsDocument51 pagesWirelessHART - Implementation and Evaluation On Wireless Sensorstanathos18No ratings yet
- Switch Mode Multi Level Power AmplifierDocument56 pagesSwitch Mode Multi Level Power AmplifierLuiz Clemente PimentaNo ratings yet
- Siemens TelecomDocument60 pagesSiemens TelecomsisfNo ratings yet
- Radar Pulse Compression Using Stepped Frequency Train of PulsesDocument19 pagesRadar Pulse Compression Using Stepped Frequency Train of Pulsesavinashgiri99No ratings yet
- AAU3910 Technical Specifications (V100R016C10 - 02) (PDF) - enDocument70 pagesAAU3910 Technical Specifications (V100R016C10 - 02) (PDF) - enISSAMNo ratings yet
- Module 8 - Optical Link DesignDocument5 pagesModule 8 - Optical Link Designdereje seyoum100% (1)
- ch4 p2 Optimum Receivers For Awgn ChannelsDocument17 pagesch4 p2 Optimum Receivers For Awgn ChannelsHoàng ZioNo ratings yet
- DC-04-Optimum Receivers For AWGN ChannelsDocument112 pagesDC-04-Optimum Receivers For AWGN ChannelsNguyễn Quang MinhNo ratings yet
- Statistical Channel ModellingDocument18 pagesStatistical Channel ModellingGabriel KiarieNo ratings yet
- Direct-Sequence Spread-Spectrum: Basic PrincipleDocument16 pagesDirect-Sequence Spread-Spectrum: Basic PrincipleSarath ChandraNo ratings yet
- Digital Communication Chapter 3Document37 pagesDigital Communication Chapter 3aarushibawejajiNo ratings yet
- Power Spectral DensityDocument8 pagesPower Spectral DensityANIRUDDHA PAULNo ratings yet
- Statistical MIMO RadarDocument34 pagesStatistical MIMO RadarVanidevi ManiNo ratings yet
- Chapter 4Document57 pagesChapter 4Krishna Rana MagarNo ratings yet
- EE3101 - 4 Chapter 1-2 Baseband Transmission - r0Document24 pagesEE3101 - 4 Chapter 1-2 Baseband Transmission - r0fishkantNo ratings yet
- Optimal Channel Estimation For Capacity Maximization in OFDM SystemsDocument20 pagesOptimal Channel Estimation For Capacity Maximization in OFDM Systemsabda3737No ratings yet
- Mod 5 - 1Document43 pagesMod 5 - 1anuNo ratings yet
- Lecture 3 Image Digitization 2Document45 pagesLecture 3 Image Digitization 2Muhammad SubhanNo ratings yet
- Chapter-4 Line CodesDocument43 pagesChapter-4 Line CodesPriya KrishnanNo ratings yet
- Chapter 7: Spread Spectrum: Frequency Hopping Direct Sequence Spread Spectrum Code Division Multiple Access (CDMA)Document40 pagesChapter 7: Spread Spectrum: Frequency Hopping Direct Sequence Spread Spectrum Code Division Multiple Access (CDMA)Noel KeakedaNo ratings yet
- TSKS14: Multiple Antenna CommunicationsDocument26 pagesTSKS14: Multiple Antenna CommunicationsnitishNo ratings yet
- Digital Signal Processing & Applications: Subject Code - ECN-312Document24 pagesDigital Signal Processing & Applications: Subject Code - ECN-312surendra parlaNo ratings yet
- Lectures 7-8 Winter 2012Document73 pagesLectures 7-8 Winter 2012wellhellothere123No ratings yet
- Chapter 6 - Mobile BasicsDocument26 pagesChapter 6 - Mobile Basicsn2hj2nNo ratings yet
- Selected Topics in DSP For Wireless: Jean-Paul M.G. Linnartz Nat - Lab., Philips ResearchDocument42 pagesSelected Topics in DSP For Wireless: Jean-Paul M.G. Linnartz Nat - Lab., Philips Researchamrefat77No ratings yet
- Intro Lecture NotesDocument15 pagesIntro Lecture NotesKevin DanyNo ratings yet
- Orthogonal Biorthogonal and Simplex SignalsDocument17 pagesOrthogonal Biorthogonal and Simplex Signalsindameantime5655No ratings yet
- Ch1-DSP IntroductionDocument70 pagesCh1-DSP IntroductionPhạm ThắngNo ratings yet
- EE-432 Wireless Communications (3+0) : Instructor Dr. Shahryar Saleem Week 11 Lecture 3Document26 pagesEE-432 Wireless Communications (3+0) : Instructor Dr. Shahryar Saleem Week 11 Lecture 3Akira MannahelNo ratings yet
- Microsoft PowerPoint - Spread Spectrum System Part 01Document16 pagesMicrosoft PowerPoint - Spread Spectrum System Part 01hadeer.hNo ratings yet
- Concepts & Information TheoryDocument68 pagesConcepts & Information TheorybiruckNo ratings yet
- Unit 4Document58 pagesUnit 4Sugumar Sar DuraiNo ratings yet
- Critical Density Thresholds For Coverage in Wireless Sensor NetworksDocument24 pagesCritical Density Thresholds For Coverage in Wireless Sensor NetworksRasha ZiyadNo ratings yet
- Digital Communications (Chapter 2)Document76 pagesDigital Communications (Chapter 2)Irfan YounasNo ratings yet
- Line Coding TechniquesDocument13 pagesLine Coding TechniquesSahilPrabhakarNo ratings yet
- QuantizationDocument89 pagesQuantizationannanndhiii100% (1)
- Lecture 2Document19 pagesLecture 2elmzyonasaraNo ratings yet
- Qos of Wireless Sensor Network: ExposureDocument12 pagesQos of Wireless Sensor Network: ExposureBhima HarshaNo ratings yet
- SCI. Tema 3Document40 pagesSCI. Tema 3laylaestrelladaNo ratings yet
- Adaptive Echo Cancellation: The LMS AlgorithmDocument12 pagesAdaptive Echo Cancellation: The LMS AlgorithmMourad BenzianeNo ratings yet
- TIES328 Matlab Exercise 1: Zhdizhan@student - Jyu.fiDocument42 pagesTIES328 Matlab Exercise 1: Zhdizhan@student - Jyu.fiNacho ReyesNo ratings yet
- Unit IDocument98 pagesUnit IVENU VNo ratings yet
- Review On ELEC333: Spring 2011 Nico & WilberDocument63 pagesReview On ELEC333: Spring 2011 Nico & WilberKevin ChenNo ratings yet
- Sample Research Paper 1 PDFDocument11 pagesSample Research Paper 1 PDFMr. N. Aravindkumar Asst Prof MECHNo ratings yet
- Week 4Document21 pagesWeek 4usmanshah1998.usNo ratings yet
- Review of Vibration Analysis Techniques 05chapter4Document25 pagesReview of Vibration Analysis Techniques 05chapter4Nuno HenriquesNo ratings yet
- CE I - Module 4 - Part 2Document31 pagesCE I - Module 4 - Part 2Renjeesh bklNo ratings yet
- Communication Through Fading ChannelsDocument8 pagesCommunication Through Fading Channelspoonam_goyal26No ratings yet
- Robust Pitch Detection Using DCT Based Spectral AutocorrelationDocument20 pagesRobust Pitch Detection Using DCT Based Spectral Autocorrelationsudhakar raiNo ratings yet
- DCT 5Document43 pagesDCT 5syed02No ratings yet
- Digital Signal Processing Fundamentals: Shree Prasad MDocument21 pagesDigital Signal Processing Fundamentals: Shree Prasad MShashi KiranNo ratings yet
- Introduction To Diversity Motivation: BranchesDocument6 pagesIntroduction To Diversity Motivation: BranchesDaniel MarosNo ratings yet
- Hayward Green VGDocument28 pagesHayward Green VGsumasuthanNo ratings yet
- 13 - ECE 3125 ECE 3242 - Nov 21 2012 - Baseband Demodulation and DetectionDocument18 pages13 - ECE 3125 ECE 3242 - Nov 21 2012 - Baseband Demodulation and DetectionEng-Ahmed ShabellNo ratings yet
- Unit-I Radar EngineeringDocument49 pagesUnit-I Radar Engineeringamarendra.jadda100% (1)
- Data Communications & Computer NetworksDocument31 pagesData Communications & Computer NetworksNeo IctNo ratings yet
- DC-04-Optimum Receivers For AWGN ChannelsDocument112 pagesDC-04-Optimum Receivers For AWGN ChannelsHaripriya RadhakrishnanNo ratings yet
- Digital Signal Processing & Applications: Subject Code - ECN-312Document24 pagesDigital Signal Processing & Applications: Subject Code - ECN-312Saurabh YadavNo ratings yet
- Tailieu RadarDocument37 pagesTailieu RadarbinhmaixuanNo ratings yet
- Orthogonal Frequency Division Multiplexing Ofdm A PrimerDocument105 pagesOrthogonal Frequency Division Multiplexing Ofdm A PrimerKiruba KNo ratings yet
- CSE3213 05 AnalogDigitalSignals F2015 Posted Part3Document8 pagesCSE3213 05 AnalogDigitalSignals F2015 Posted Part3zahra bsharaNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- ch4 p3 Optimum Receivers For Awgn ChannelsDocument20 pagesch4 p3 Optimum Receivers For Awgn ChannelsHoàng ZioNo ratings yet
- ch3 Digital Modulation SchemesDocument24 pagesch3 Digital Modulation SchemesHoàng ZioNo ratings yet
- ch1 IntroductionDocument24 pagesch1 IntroductionHoàng ZioNo ratings yet
- ch2 Deterministic and Random Signal AnalysisDocument32 pagesch2 Deterministic and Random Signal AnalysisHoàng ZioNo ratings yet
- Chapter 1 - C - Reverse Breakdown and Zener Diodes - Revised - 1Document16 pagesChapter 1 - C - Reverse Breakdown and Zener Diodes - Revised - 1Hoàng ZioNo ratings yet
- Chapter 1 - A - Semiconductor Physics - Part A - Revised 7Document50 pagesChapter 1 - A - Semiconductor Physics - Part A - Revised 7Hoàng ZioNo ratings yet
- Project 5 Superheterodyne AM Receiver Design in ADS June 2014 PDFDocument4 pagesProject 5 Superheterodyne AM Receiver Design in ADS June 2014 PDFBayu AziNo ratings yet
- Receiver Sensitivity 1Document5 pagesReceiver Sensitivity 1Nahum SetuNo ratings yet
- L4 Random Signals and Noise PDFDocument55 pagesL4 Random Signals and Noise PDFcriscab12345No ratings yet
- RRC Admission Control FailuresDocument3 pagesRRC Admission Control FailuresNuru J. HauleNo ratings yet
- Acs Assignment-1Document21 pagesAcs Assignment-1ravindrasskNo ratings yet
- Product Specifications: Beta 58A Supercardioid Dynamic Vocal MicrophoneDocument1 pageProduct Specifications: Beta 58A Supercardioid Dynamic Vocal MicrophoneIva RenićNo ratings yet
- RF Applications in Digital Signal Processing: T. SchilcherDocument35 pagesRF Applications in Digital Signal Processing: T. SchilcherswjangNo ratings yet
- Basic Op-Amp Circuit AnalysisDocument13 pagesBasic Op-Amp Circuit AnalysisItoroItaNo ratings yet
- Space Segment SubsystemsDocument12 pagesSpace Segment SubsystemsThembelanienkosini ChikhambiNo ratings yet
- MlriDocument328 pagesMlriSridhar BolliNo ratings yet
- Topical Test 1 F5Document6 pagesTopical Test 1 F5Rachael HoNo ratings yet
- Signals and SystemsDocument122 pagesSignals and SystemsBikshu11No ratings yet
- A Compact, Low-Phase Noise Fractional-N PLL For Global Navigation ReceiverDocument4 pagesA Compact, Low-Phase Noise Fractional-N PLL For Global Navigation ReceiverRizwan SPNo ratings yet
- Foster Seeley DiscriminatorDocument2 pagesFoster Seeley DiscriminatorDebesh Bar100% (1)
- Exercise 4 - Ans - OnlyDocument2 pagesExercise 4 - Ans - OnlyEng AbdiRahim Khalif AliNo ratings yet
- Tl15 CatalogDocument80 pagesTl15 CatalogJonathan MinorsNo ratings yet
- The IBODocument11 pagesThe IBOIshtiaq Ahmed100% (1)
- DmeDocument30 pagesDmeMalakonda ReddyNo ratings yet
- CHP 1 (Completed)Document61 pagesCHP 1 (Completed)Ronaldo KmeNo ratings yet
- Time-Frequency Analysis of Long Range UltrasonicDocument8 pagesTime-Frequency Analysis of Long Range UltrasonicNguyễn Tường MinhNo ratings yet
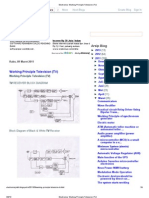
- Electronics - Working Principle Television (TV)Document9 pagesElectronics - Working Principle Television (TV)Suman DasNo ratings yet
- BaudDocument93 pagesBaudMurali Mohan ReddyNo ratings yet
- A Dual Wideband Bandpass Filter For WLAN and 5G Wi-Fi ApplicationsDocument4 pagesA Dual Wideband Bandpass Filter For WLAN and 5G Wi-Fi Applicationsnassimo nassimoNo ratings yet
- GP320B Operator's Manual B2 1-13-11Document20 pagesGP320B Operator's Manual B2 1-13-11Mario FerreiraNo ratings yet