You might also like
- Structural Stability W.f.chenDocument255 pagesStructural Stability W.f.chenJithin Payyanur100% (8)
- Analysis and Design of Stiffened Raft FoundationDocument270 pagesAnalysis and Design of Stiffened Raft FoundationKemoH0% (1)
- HOBBS (1957) - An Investigation Into The Stress Distribution in Pile Caps With Some Notes On DesignDocument34 pagesHOBBS (1957) - An Investigation Into The Stress Distribution in Pile Caps With Some Notes On DesignVítor FreitasNo ratings yet
- Characterization of Geotechnical Variability PDFDocument18 pagesCharacterization of Geotechnical Variability PDFTrần Quang Huy100% (1)
- CPRF Analysis PDFDocument8 pagesCPRF Analysis PDFMohd FirojNo ratings yet
- Depth of Fixity of Piles in Clay Under Dynamic Lateral Load PDFDocument15 pagesDepth of Fixity of Piles in Clay Under Dynamic Lateral Load PDFRahulKumarSinghNo ratings yet
- Site Specific Ground Response Analysis PDFDocument9 pagesSite Specific Ground Response Analysis PDFSudan ShresthaNo ratings yet
- Design of PileDocument12 pagesDesign of PileAniket DNo ratings yet
- Design and Construction of Mat (Raft) Foundations - BookDocument10 pagesDesign and Construction of Mat (Raft) Foundations - BookbatteekhNo ratings yet
- Designing Piles ForDrag ForceDocument37 pagesDesigning Piles ForDrag ForceReemALMousawiNo ratings yet
- Single Pile Dynamic StiffnessDocument40 pagesSingle Pile Dynamic Stiffnessriz2010No ratings yet
- Is 13063 - 1991 Structural Safety o Fbuildings On Shallow Foundations On Rocks - Code of PracticeDocument19 pagesIs 13063 - 1991 Structural Safety o Fbuildings On Shallow Foundations On Rocks - Code of PracticePrapa KaranNo ratings yet
- Dynamic Interaction of Machine FoundationsDocument262 pagesDynamic Interaction of Machine FoundationsSayed ElarabyNo ratings yet
- RSPile - Laterally Loaded Pile Theory ManualDocument14 pagesRSPile - Laterally Loaded Pile Theory Manualjacs127100% (1)
- Columns and SlabsDocument142 pagesColumns and Slabsk. mohan brothersNo ratings yet
- Behavior of Pile Foundations in Laterally Spreading Ground During Centrifuge TestsDocument16 pagesBehavior of Pile Foundations in Laterally Spreading Ground During Centrifuge TestsmamandaweNo ratings yet
- Lateral Load Pile Scour DepthDocument9 pagesLateral Load Pile Scour DepthPalak ShivhareNo ratings yet
- Steep Reinforced SlopesDocument35 pagesSteep Reinforced SlopesOanaNo ratings yet
- Dynamic Stiffness and Damping of PilesDocument25 pagesDynamic Stiffness and Damping of PilesapirakqNo ratings yet
- 1 Dynamic Analysis of Machine Foundation Using AnsysDocument7 pages1 Dynamic Analysis of Machine Foundation Using AnsysVivek DhutNo ratings yet
- Numerical Study of Lateral PilesDocument8 pagesNumerical Study of Lateral PilesSajid IqbalNo ratings yet
- Analysis On Laterally Loaded Group PilesDocument5 pagesAnalysis On Laterally Loaded Group PileschenNo ratings yet
- Retaining Wall Design WSMDocument14 pagesRetaining Wall Design WSMSaroj BhattaraiNo ratings yet
- ZSoilDay2011 HSmodels-Course v3.1Document104 pagesZSoilDay2011 HSmodels-Course v3.1Mohamed A. El-BadawiNo ratings yet
- Introduction To Ground Modification PDFDocument18 pagesIntroduction To Ground Modification PDFAli naveedNo ratings yet
- Evaluation of Concrete Chimney With Liner: Stack: BrickDocument12 pagesEvaluation of Concrete Chimney With Liner: Stack: Brickcaojin259No ratings yet
- Reinforced Concrete Edge Beam-Column-Slab Connections Subjected To Earthquake Loading PDFDocument20 pagesReinforced Concrete Edge Beam-Column-Slab Connections Subjected To Earthquake Loading PDFPrabu RengarajanNo ratings yet
- Duncan Lateral Load Analysis of Groups of Piles and Drilled Shafts 1994Document17 pagesDuncan Lateral Load Analysis of Groups of Piles and Drilled Shafts 1994myplaxis100% (1)
- Determination of Radial Coefficient of Consolidation Using Log I T I MethodDocument10 pagesDetermination of Radial Coefficient of Consolidation Using Log I T I MethodKlaus HenriqueNo ratings yet
- Seismic Design of Shallow Foundations PDFDocument40 pagesSeismic Design of Shallow Foundations PDFNicon Paul100% (1)
- LInkedIn Discussion On Design of Structures With Transfer Plate and Transfer BeamDocument3 pagesLInkedIn Discussion On Design of Structures With Transfer Plate and Transfer BeamLuisito Sta. InesNo ratings yet
- Site Response AnalysisDocument263 pagesSite Response Analysismark_torreonNo ratings yet
- Deep ExcavationDocument5 pagesDeep Excavationgops1963No ratings yet
- Slope Stability Analysis Report PDFDocument7 pagesSlope Stability Analysis Report PDFPrakash Singh RawalNo ratings yet
- How Do Fixed and Pinned Connections Between Piles and Pile Caps Affect The Load Carrying Capacity of PilesDocument1 pageHow Do Fixed and Pinned Connections Between Piles and Pile Caps Affect The Load Carrying Capacity of PilesthakrarhitsNo ratings yet
- 14 Comparison of Geotechnic Softwares Geo FEM Plaxis Z-SoilDocument6 pages14 Comparison of Geotechnic Softwares Geo FEM Plaxis Z-SoilWondwosen BelayNo ratings yet
- Bearing Capacity of Shallow FoundationDocument46 pagesBearing Capacity of Shallow FoundationPranavaDart100% (1)
- Semi-Empirical Procedures For Evaluating Liquefaction Potential, Idriss & Boulanger, 2004Document26 pagesSemi-Empirical Procedures For Evaluating Liquefaction Potential, Idriss & Boulanger, 2004hugojameswoodNo ratings yet
- 546 Standard Asce/Sei 7-16Document11 pages546 Standard Asce/Sei 7-16Demi CalderonNo ratings yet
- A Brief Overview of 2 Order (Or P-Delta) Analysis: ObjectiveDocument8 pagesA Brief Overview of 2 Order (Or P-Delta) Analysis: Objectiveanimesh91No ratings yet
- Finite Element Analysis of Soil Bearing Capacity Using PlaxisDocument5 pagesFinite Element Analysis of Soil Bearing Capacity Using PlaxisRehan HakroNo ratings yet
- Simpli Ed Approach For Design of Raft Foundations Against Fault Rupture. Part II: Soil-Structure InteractionDocument15 pagesSimpli Ed Approach For Design of Raft Foundations Against Fault Rupture. Part II: Soil-Structure Interactionshare4learnNo ratings yet
- Usace - Response Spectra & Seismic Analysis For Concrete Hyd StructDocument248 pagesUsace - Response Spectra & Seismic Analysis For Concrete Hyd StructOmar ElioNo ratings yet
- Visual Introduction To SAP2000Document154 pagesVisual Introduction To SAP2000henrengNo ratings yet
- Lateral Deflection of Rigid PilesDocument7 pagesLateral Deflection of Rigid PilesCelal ÜnalNo ratings yet
- FEM in Geotech EngineeringDocument21 pagesFEM in Geotech Engineeringtsuak100% (1)
- SSE Sheet Pile Analysis Sheet v1.10Document3 pagesSSE Sheet Pile Analysis Sheet v1.10SES DESIGNNo ratings yet
- A Comprehensive Database of Tests on Axially Loaded Piles Driven in SandFrom EverandA Comprehensive Database of Tests on Axially Loaded Piles Driven in SandNo ratings yet
- Model Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionFrom EverandModel Analysis of Plane Structures: The Commonwealth and International Library: Structures and Solid Body Mechanics DivisionNo ratings yet
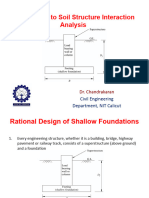
- Introduction To Soil Structure Interaction AnalysisDocument101 pagesIntroduction To Soil Structure Interaction AnalysisANJALI SNo ratings yet
- Soil-Foundation-Structure Interaction Analysis: Tahmeed M. Al-HussainiDocument14 pagesSoil-Foundation-Structure Interaction Analysis: Tahmeed M. Al-HussainiANITHA PG20ANo ratings yet
- Chapter 2 Elastic Foundation BeamDocument157 pagesChapter 2 Elastic Foundation BeamyangNo ratings yet
- Effect of Soil Nonlinearity On AnalysisDocument9 pagesEffect of Soil Nonlinearity On AnalysisArjun PaudelNo ratings yet
- Chapter 1: Introduction: 1.1 BackgroundDocument13 pagesChapter 1: Introduction: 1.1 BackgroundAswain TamrakarNo ratings yet
- (PART I) An Introduction To Retaining Walls DesignDocument12 pages(PART I) An Introduction To Retaining Walls DesignPankaj KapilNo ratings yet
- The Importance of A Sound FoundationDocument5 pagesThe Importance of A Sound Foundationsantosh kumarNo ratings yet
- Chapter 1. Module 144aDocument9 pagesChapter 1. Module 144aligabaNo ratings yet
- Contribution of Soil-Structure Interaction To Seismic Response of BuildingsDocument36 pagesContribution of Soil-Structure Interaction To Seismic Response of BuildingsHectoreRodriguezlNo ratings yet
- Ijrras 16 3 06Document10 pagesIjrras 16 3 06Rajkumar KarmegamNo ratings yet
- Structural DampersDocument78 pagesStructural DampersJithin PayyanurNo ratings yet
- Basic Structural Steel Design: Rupen GoswamiDocument55 pagesBasic Structural Steel Design: Rupen GoswamiJithin PayyanurNo ratings yet
- 1 s2.0 S1350630713002768 MainDocument17 pages1 s2.0 S1350630713002768 MainJithin PayyanurNo ratings yet
- Base IsolationDocument27 pagesBase IsolationJithin PayyanurNo ratings yet
- Alain Pecker - Rion Antirion (Presentation)Document78 pagesAlain Pecker - Rion Antirion (Presentation)Jithin PayyanurNo ratings yet
- Basha Soil Structure Interaction IntroductionDocument62 pagesBasha Soil Structure Interaction IntroductionJithin PayyanurNo ratings yet
- Technical Manual 1Document118 pagesTechnical Manual 1Homero Silva100% (14)
- Ashwin D: Curriculum VitaeDocument2 pagesAshwin D: Curriculum VitaeJithin PayyanurNo ratings yet
- Jibin V: Career ObjectiveDocument3 pagesJibin V: Career ObjectiveJithin PayyanurNo ratings yet
- Sujai TCS RESumeDocument3 pagesSujai TCS RESumeJithin Payyanur80% (5)