You might also like
- 98 Mars Rover SuspensionDocument1 page98 Mars Rover SuspensionDemon slayerNo ratings yet
- MEC 130 Module 4 - PDF 2 Overrunning Clutches and ApplicationsDocument8 pagesMEC 130 Module 4 - PDF 2 Overrunning Clutches and ApplicationsvelmuruganNo ratings yet
- Automation Check List For ConfirmingDocument1 pageAutomation Check List For Confirmingชัชชัย พรายมีNo ratings yet
- ABON RollerscreenDocument6 pagesABON Rollerscreenrajeevup2004No ratings yet
- Bogie-Platform For Electric LocomotivesDocument2 pagesBogie-Platform For Electric LocomotivesДенис НедоступовNo ratings yet
- Um 38e0a 006 00 EngDocument1 pageUm 38e0a 006 00 EngQuincy de KosterNo ratings yet
- Double E - Safety ChucksDocument6 pagesDouble E - Safety ChucksYanci JhoeNo ratings yet
- Retractor Type Flyer by Safe Ride NewsDocument2 pagesRetractor Type Flyer by Safe Ride NewsPetar ArsenijevicNo ratings yet
- 2007 RST Mid Models EnglishDocument1 page2007 RST Mid Models EnglishMaribe TshegoNo ratings yet
- 06JudyManual EnglishDocument5 pages06JudyManual EnglishilbruthumNo ratings yet
- 03 Wheel EoquipmentDocument5 pages03 Wheel Eoquipmentsica1234No ratings yet
- Sidecar InstallationDocument9 pagesSidecar Installationapi-3727287100% (4)
- Performance Through: TechnologyDocument3 pagesPerformance Through: TechnologyMichael TayactacNo ratings yet
- I Reliable/Durable I Ease I - I T - : Motor BuiltDocument16 pagesI Reliable/Durable I Ease I - I T - : Motor Builtjose miguelNo ratings yet
- Performance Through: TechnologyDocument3 pagesPerformance Through: Technologysiva rajaNo ratings yet
- Performance Through: TechnologyDocument3 pagesPerformance Through: TechnologyananNo ratings yet
- Cantilever Axes ELCC TOC Bookmark Cantilever Axes ELCCDocument30 pagesCantilever Axes ELCC TOC Bookmark Cantilever Axes ELCCSysviewNo ratings yet
- Hardinge CatalogDocument8 pagesHardinge CatalogPedro VianaNo ratings yet
- Wheel Balancers - GIULIANO AUTOMOTIVEDocument20 pagesWheel Balancers - GIULIANO AUTOMOTIVEGiulianoNo ratings yet
- Bullet-Proof Transporter K4 (BPT-K4) : - by Shiva Engineering WorksDocument14 pagesBullet-Proof Transporter K4 (BPT-K4) : - by Shiva Engineering WorksSoham DasguptaNo ratings yet
- Bronco Badlands - enDocument1 pageBronco Badlands - entalalNo ratings yet
- Cam Motion S1351 TD - ENGDocument4 pagesCam Motion S1351 TD - ENGSanket SawantNo ratings yet
- Gearboxes Design Guide PDFDocument26 pagesGearboxes Design Guide PDFDracoRodriguezNo ratings yet
- Gearboxes: Motion Design GuideDocument26 pagesGearboxes: Motion Design GuideMohana Rao VabbilireddiNo ratings yet
- MEC 130 Module 4 - PDF 1 Types of ClutchesDocument12 pagesMEC 130 Module 4 - PDF 1 Types of ClutchesvijayNo ratings yet
- Selecting Inching Drives For Mill and KilnDocument5 pagesSelecting Inching Drives For Mill and KilnPierre Castillo AbrilNo ratings yet
- Ficha Tecnica Motoniveladora Caterpillar 130 GDocument16 pagesFicha Tecnica Motoniveladora Caterpillar 130 GNegrittaEzkhobarNo ratings yet
- Double e Safety ChucksDocument6 pagesDouble e Safety Chucksjacobpm2010No ratings yet
- Turning Methods & Machines: Upcoming Chapters Metal RemovalDocument8 pagesTurning Methods & Machines: Upcoming Chapters Metal RemovalburakNo ratings yet
- KUBOTA Mini ExcavatorDocument12 pagesKUBOTA Mini ExcavatorjeslynlimNo ratings yet
- Clutch Assymbly PDFDocument28 pagesClutch Assymbly PDFAnkit SharmaNo ratings yet
- Complete Drivetrain Solutions: Quality Marine Equipment Since 1981Document11 pagesComplete Drivetrain Solutions: Quality Marine Equipment Since 1981promaraNo ratings yet
- Rope GripperDocument12 pagesRope GripperFERNSNo ratings yet
- Cycling Aids For Arm AmputeesDocument4 pagesCycling Aids For Arm AmputeesRafik ArifNo ratings yet
- CBC Couplers: A Report On LHB and Wagon CbcsDocument10 pagesCBC Couplers: A Report On LHB and Wagon CbcsWheel Bogie Parel WSNo ratings yet
- Module 2 - CouplingsDocument18 pagesModule 2 - CouplingsthandonksNo ratings yet
- Re2005 12Document100 pagesRe2005 12Pablo Molina GallurNo ratings yet
- S40 Drive Manual BVh2082gbDocument7 pagesS40 Drive Manual BVh2082gbJean EssmannNo ratings yet
- Houdini: Rigging GuideDocument36 pagesHoudini: Rigging GuideAhmad TantawyNo ratings yet
- DIFLOK 4 BDocument1 pageDIFLOK 4 BdeepakmudgilNo ratings yet
- Centre Buffer CouplerDocument51 pagesCentre Buffer Couplersaurabh kumar100% (1)
- Rod BearingsDocument29 pagesRod BearingsDaniel SarmientoNo ratings yet
- Cryogenic Nano-Actuator: ProceedingsDocument14 pagesCryogenic Nano-Actuator: ProceedingsAmirNo ratings yet
- BackdrivabilityDocument6 pagesBackdrivabilityMarcoFernandoAullaNo ratings yet
- Versant 4100 PressDocument44 pagesVersant 4100 PressLuisFelipeCruzMarNo ratings yet
- Agile Flexibility: Ability MFG Agility FromDocument5 pagesAgile Flexibility: Ability MFG Agility Fromniharika khannaNo ratings yet
- AEDK0627 CAT Truck Body Operation and Maitenance Guide PDFDocument9 pagesAEDK0627 CAT Truck Body Operation and Maitenance Guide PDFCarlos Lobo100% (2)
- Racecar Engineering 2005 04 PDFDocument100 pagesRacecar Engineering 2005 04 PDFfreddyonnimiNo ratings yet
- (CarrLane) Fullproductcatalogpdf-2017Document701 pages(CarrLane) Fullproductcatalogpdf-2017Diogo_23No ratings yet
- Felt Compulsion Manual 27.5 V1Document15 pagesFelt Compulsion Manual 27.5 V1Diogo SilvaNo ratings yet
- Sko Cool Smart Executive PlusDocument2 pagesSko Cool Smart Executive Plusnikos.spanakakisNo ratings yet
- 2011 Ops-Core CatalogDocument21 pages2011 Ops-Core Catalogsolsys100% (1)
- Monarch Lathes 60 Series Op and Parts Manual20140206Document106 pagesMonarch Lathes 60 Series Op and Parts Manual20140206farid said errahmaniNo ratings yet
- Ijser: Design Aspects of A Motorised Travelling TripperDocument8 pagesIjser: Design Aspects of A Motorised Travelling TripperBiranchi DasNo ratings yet
- Stryker SV1: Versatile Patient Care BedDocument2 pagesStryker SV1: Versatile Patient Care BedDiana VegaNo ratings yet
- Summary of Mecanic DomainDocument13 pagesSummary of Mecanic DomainNelson KemdengNo ratings yet
- Operations and Maintenance Manual: February 2019Document16 pagesOperations and Maintenance Manual: February 2019Krishna N H100% (1)
- The Instant Handbook of Boat Handling, Navigation, and Seamanship: A Quick-Reference Guide for Sail and PowerFrom EverandThe Instant Handbook of Boat Handling, Navigation, and Seamanship: A Quick-Reference Guide for Sail and PowerRating: 5 out of 5 stars5/5 (1)
- MKL 3 ReportDocument9 pagesMKL 3 ReportMatthew NelsonNo ratings yet
- VL2 ReportDocument25 pagesVL2 ReportMatthew NelsonNo ratings yet
- Solar Desalination Graphene Oxide StalkDocument11 pagesSolar Desalination Graphene Oxide StalkMatthew NelsonNo ratings yet
- Matthew Nelson - ME103 Lab Report #1Document21 pagesMatthew Nelson - ME103 Lab Report #1Matthew NelsonNo ratings yet
- MKL3 PresentationDocument10 pagesMKL3 PresentationMatthew NelsonNo ratings yet
- Research EvolutionDocument21 pagesResearch EvolutionMatthew NelsonNo ratings yet
- Deconstructing Solar Cells in Desalination PraxisDocument17 pagesDeconstructing Solar Cells in Desalination PraxisMatthew NelsonNo ratings yet
- Byer Square - SF Campus For Jewish LivingDocument16 pagesByer Square - SF Campus For Jewish LivingMatthew NelsonNo ratings yet
- CombinepdfDocument11 pagesCombinepdfMatthew NelsonNo ratings yet
- FungFellowship Final Report SFCJLDocument20 pagesFungFellowship Final Report SFCJLMatthew NelsonNo ratings yet
- Purple Asparagus ComicDocument3 pagesPurple Asparagus ComicMatthew NelsonNo ratings yet
- Developing Bio-Inspired Condensers To Facilitate Solar Desalination (ReNUWIt)Document13 pagesDeveloping Bio-Inspired Condensers To Facilitate Solar Desalination (ReNUWIt)Matthew NelsonNo ratings yet
- ME101 Project - Oral ReportDocument33 pagesME101 Project - Oral ReportMatthew NelsonNo ratings yet
- ME110 T#8 - Product Concept Cluster - ConceptsDocument9 pagesME110 T#8 - Product Concept Cluster - ConceptsMatthew NelsonNo ratings yet
- Video Setup Guidelines!Document1 pageVideo Setup Guidelines!Matthew NelsonNo ratings yet
- ME110 I#7 - Potential Concept DesignDocument7 pagesME110 I#7 - Potential Concept DesignMatthew NelsonNo ratings yet
- ME110 T#9 - Pugh Concept Selection - Concept SelectionsDocument2 pagesME110 T#9 - Pugh Concept Selection - Concept SelectionsMatthew NelsonNo ratings yet
- Team 7 Purple ASP Final DeliverableDocument20 pagesTeam 7 Purple ASP Final DeliverableMatthew NelsonNo ratings yet
- ME110 T#11 - Prototype Features - Results & DiscussionDocument5 pagesME110 T#11 - Prototype Features - Results & DiscussionMatthew NelsonNo ratings yet
- ME110 T#3 - Team PresentationDocument10 pagesME110 T#3 - Team PresentationMatthew NelsonNo ratings yet
- YE's IP SurveyDocument4 pagesYE's IP SurveyMatthew NelsonNo ratings yet
- ME110 T#9 - Pugh Concept Selection - Pugh MethodDocument1 pageME110 T#9 - Pugh Concept Selection - Pugh MethodMatthew NelsonNo ratings yet
- Final Report SFCJL - Fung FellowshipDocument20 pagesFinal Report SFCJL - Fung FellowshipMatthew NelsonNo ratings yet
- FF - AI Graphic Novel SketchDocument5 pagesFF - AI Graphic Novel SketchMatthew NelsonNo ratings yet
- ME102B Final ReportDocument10 pagesME102B Final ReportMatthew NelsonNo ratings yet
- The Watch ListDocument106 pagesThe Watch ListMatthew NelsonNo ratings yet
- NEWron (AI) - Presentation DeckDocument25 pagesNEWron (AI) - Presentation DeckMatthew NelsonNo ratings yet
- C Ovid-19 Forecast - Final Report: Mechanical Engineering 101/221 To Lean Manufacturing Sara Mcmains May 5, 2021Document34 pagesC Ovid-19 Forecast - Final Report: Mechanical Engineering 101/221 To Lean Manufacturing Sara Mcmains May 5, 2021Matthew NelsonNo ratings yet
- ME103 Final Presentation - Group 10Document21 pagesME103 Final Presentation - Group 10Matthew NelsonNo ratings yet
- E26 Body ReportDocument16 pagesE26 Body ReportMatthew NelsonNo ratings yet
- Local Balloon Professional Earns Recognition As Certified Balloon ArtistDocument2 pagesLocal Balloon Professional Earns Recognition As Certified Balloon ArtistPR.comNo ratings yet
- 000guidesl18456823 GSSG DCJLCDocument7 pages000guidesl18456823 GSSG DCJLCPio BilazonNo ratings yet
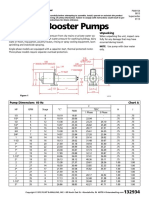
- FWPB Booster Pumps InstructionsDocument15 pagesFWPB Booster Pumps InstructionsRamadanNo ratings yet
- Ultima Underworld 2 - Player's GuideDocument40 pagesUltima Underworld 2 - Player's GuideThea_VatarNo ratings yet
- Process Design and Control: Course Code Monday & FridayDocument37 pagesProcess Design and Control: Course Code Monday & FridayElia SaadNo ratings yet
- KHOBBY SimHelper ManualDocument3 pagesKHOBBY SimHelper Manualtedi mardetaNo ratings yet
- Speaker Testing Using AccelerometerDocument8 pagesSpeaker Testing Using Accelerometergama100% (1)
- Quiz 1 Primer IntentoDocument9 pagesQuiz 1 Primer IntentoMiguel JtmcNo ratings yet
- ONTAP 90 Network Management Guide PDFDocument155 pagesONTAP 90 Network Management Guide PDFJoy MukherjeeNo ratings yet
- Oel Lab 1Document4 pagesOel Lab 1dzikrydsNo ratings yet
- MYSQL MCQ Term2 SujanDocument3 pagesMYSQL MCQ Term2 SujanSujan KNo ratings yet
- Xray2Go Manual Portable X-Ray SystemDocument36 pagesXray2Go Manual Portable X-Ray SystemEbb Bay100% (1)
- Breter RM EngDocument21 pagesBreter RM EngAndres GarciaNo ratings yet
- Traverse Type C - 1015568Document1 pageTraverse Type C - 1015568Loki TroliNo ratings yet
- CDS VAM TOP ® 3.5in. 9.2lb-ft L80 Type 1 API Drift 2.867in. 87.5%Document1 pageCDS VAM TOP ® 3.5in. 9.2lb-ft L80 Type 1 API Drift 2.867in. 87.5%anon_798581734100% (1)
- 1 CAP 8100 Operations Manual Apr 22 PDFDocument114 pages1 CAP 8100 Operations Manual Apr 22 PDFSanjay MittalNo ratings yet
- Tales of A Security GuardDocument127 pagesTales of A Security GuardAlexNo ratings yet
- 2023PO3372. Eurofins. Pesticides + Heavy Metal Testing + Nutritive Values Ecofruit 2023Document20 pages2023PO3372. Eurofins. Pesticides + Heavy Metal Testing + Nutritive Values Ecofruit 2023felman ruizNo ratings yet
- EET223-W22-EXP 1 - Uncontrolled RectifiersDocument8 pagesEET223-W22-EXP 1 - Uncontrolled Rectifiersjohnathan.donnellyNo ratings yet
- Preca Solutions BrochureDocument16 pagesPreca Solutions BrochurePMC - PRECANo ratings yet
- CV For Civil EngineerDocument6 pagesCV For Civil EngineerRAREEENo ratings yet
- "Title": Design and Fabrication of Bluetooth Controlled Robotic Cleaning MachineDocument26 pages"Title": Design and Fabrication of Bluetooth Controlled Robotic Cleaning MachineSrushti KatkarNo ratings yet
- Wind Load: K Z S Z 0Document1 pageWind Load: K Z S Z 0MechanicalNo ratings yet
- Mainframe Architecture Product Overview 1218153498319609 9Document69 pagesMainframe Architecture Product Overview 1218153498319609 9Santosh Reddy100% (1)
- 2 Maps TypesDocument22 pages2 Maps TypesSiphumeze TitiNo ratings yet
- 3 ERP Software RFP Exhibit GDocument575 pages3 ERP Software RFP Exhibit GJacob YeboaNo ratings yet
- Part 1 - Design: Water Supply Code of Australia Agency RequirementsDocument12 pagesPart 1 - Design: Water Supply Code of Australia Agency RequirementsTailieukythuat DataNo ratings yet
- Week1 - Introduction To Data Structures AlgorithmsDocument33 pagesWeek1 - Introduction To Data Structures Algorithmsmoraaloureen006No ratings yet
- Getachew Yimer PDFDocument119 pagesGetachew Yimer PDFAmos Korme100% (1)
- Lab - Visualizing The Black Hats: ObjectivesDocument3 pagesLab - Visualizing The Black Hats: ObjectivesRahmat DhanyNo ratings yet