You might also like
- DeltaV FunctionDocument542 pagesDeltaV FunctionEphraem Kalis75% (8)
- Axial, Radial TurbinesDocument91 pagesAxial, Radial TurbinesAkshay Deshpande100% (2)
- JedecDocument29 pagesJedecYugandhar TannidiNo ratings yet
- Three-Phase Rectifiers: Principles of Operation, Analysis and Performance EvaluationDocument24 pagesThree-Phase Rectifiers: Principles of Operation, Analysis and Performance EvaluationLu'ay AlmassriNo ratings yet
- Aec - U-3Document21 pagesAec - U-3kelamkiranmai265No ratings yet
- TransmissionLine Model and Performance ReDocument10 pagesTransmissionLine Model and Performance ReMushtaq Najeeb AhmedNo ratings yet
- The DSB-SCDocument21 pagesThe DSB-SCmhww9jqqpjNo ratings yet
- ACE 311 Engineering Utilities. QUIZ FOR TODAY 6.24.2022 From WLBDocument3 pagesACE 311 Engineering Utilities. QUIZ FOR TODAY 6.24.2022 From WLBDharlyn Mae ErojoNo ratings yet
- Clarke and Park TransformationDocument14 pagesClarke and Park TransformationathbeljoeNo ratings yet
- Induction MachineDocument16 pagesInduction MachineUsama RaoNo ratings yet
- Simulink Modelling of The Transient CaseDocument39 pagesSimulink Modelling of The Transient CaseMUSAIB UL FAYAZ 2022 17No ratings yet
- Chapter8s 1-UnlockedDocument19 pagesChapter8s 1-Unlockedjohn wallaceNo ratings yet
- Test2 - Sem1 - 15 - 16 SOLUTIONDocument3 pagesTest2 - Sem1 - 15 - 16 SOLUTIONlolipopNo ratings yet
- Asset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineDocument16 pagesAsset-V1 BuX+EEE321+2021 Summer+Type@Asset+Block@Fault Current Transient On Transmission LineAbrar ChowdhuryNo ratings yet
- 3.1 Instantaneous and Average Power Instantaneous PowerDocument9 pages3.1 Instantaneous and Average Power Instantaneous PowerJohn Steven Aala100% (1)
- Application of Partition FunctionDocument2 pagesApplication of Partition FunctionNITISH KUMARNo ratings yet
- Application of Partition FunctionDocument2 pagesApplication of Partition FunctionNITISH KUMARNo ratings yet
- RumusDocument8 pagesRumusMerryMerdekawatiNo ratings yet
- Power Analysis in Alternating CurrentDocument20 pagesPower Analysis in Alternating CurrentGlenn VirreyNo ratings yet
- TMM - Chapter 2Document18 pagesTMM - Chapter 2Ahmed AhmedNo ratings yet
- Experiment-4: Pure Bending of Thin PlateDocument8 pagesExperiment-4: Pure Bending of Thin PlateRahul RoyNo ratings yet
- MA1506Document70 pagesMA1506ernie123219405No ratings yet
- Emw Group Assinment: Members IDDocument17 pagesEmw Group Assinment: Members IDmuseNo ratings yet
- 3.1. AC Voltage Controllers (AC-AC Converters) : Unit IiiDocument33 pages3.1. AC Voltage Controllers (AC-AC Converters) : Unit IiiseeeniNo ratings yet
- chp2 2Document7 pageschp2 2karen dejoNo ratings yet
- R/ CosaDocument11 pagesR/ CosaSantiago dewitNo ratings yet
- Unit - 4 Alternating CurrentDocument22 pagesUnit - 4 Alternating CurrentSahil ChawlaNo ratings yet
- Inverters (DC-AC Converters) : Unit VDocument29 pagesInverters (DC-AC Converters) : Unit VseeeniNo ratings yet
- Physiological Monitoring Sheet 3-SolutionDocument7 pagesPhysiological Monitoring Sheet 3-SolutionMaissa HassanNo ratings yet
- Lab 5Document8 pagesLab 5Smshihab ShararNo ratings yet
- Study of Second Order NetworksDocument20 pagesStudy of Second Order NetworksSahilNo ratings yet
- ECGR 2254 - Fall 2020 Homework 1 Due: Friday 9/18/2020Document3 pagesECGR 2254 - Fall 2020 Homework 1 Due: Friday 9/18/2020Brandon WallsNo ratings yet
- FIN 5309 Homework 9 Solution Fall 2018: InstructionsDocument16 pagesFIN 5309 Homework 9 Solution Fall 2018: InstructionsOntime BestwritersNo ratings yet
- 05 - Fluid 2023Document13 pages05 - Fluid 2023naderabuelelaNo ratings yet
- Park and Clark Transformations Park and Clark Transformations: A Short ReviewDocument4 pagesPark and Clark Transformations Park and Clark Transformations: A Short Reviewsang bachNo ratings yet
- Matlab ProblemsDocument12 pagesMatlab Problemsganesh naidu dasariNo ratings yet
- Parkand Clarck TransformationDocument3 pagesParkand Clarck TransformationDebu JanaNo ratings yet
- Experiment-4: Pure Bending of Thin PlateDocument8 pagesExperiment-4: Pure Bending of Thin PlateRahul RoyNo ratings yet
- Transistor OsicllatorsDocument47 pagesTransistor OsicllatorsMohammad Gulam AhamadNo ratings yet
- Soal KRKK NewDocument6 pagesSoal KRKK NewGita WulandariNo ratings yet
- Quiz 1 - 1 Model AnswerDocument2 pagesQuiz 1 - 1 Model AnswerMaher Gomaa IsmaeelNo ratings yet
- Parte 3 TipeoDocument11 pagesParte 3 TipeoMatamoros De La Cruz JorgeNo ratings yet
- Es 62Document6 pagesEs 62Karl Sternberg ZaldariagaNo ratings yet
- Set 18 Solution ReviewedDocument14 pagesSet 18 Solution ReviewedMuhammad SuleetNo ratings yet
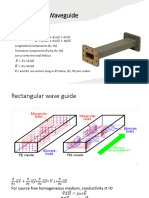
- Rectangular WaveguideDocument24 pagesRectangular WaveguidethiyagupsgNo ratings yet
- High Voltage Engineering Lec2Document14 pagesHigh Voltage Engineering Lec2nasirvivacNo ratings yet
- Thermal Turbomachinary Unit-III: Prof. Onkar SinghDocument34 pagesThermal Turbomachinary Unit-III: Prof. Onkar SinghVipin PandeyNo ratings yet
- Piping NetworksDocument14 pagesPiping NetworksKarel Grace ColotNo ratings yet
- SolutionDocument24 pagesSolutionLoku VelNo ratings yet
- Objective:: (2020 Spring Semester) MESF5450 Supplementary Exercise 03Document4 pagesObjective:: (2020 Spring Semester) MESF5450 Supplementary Exercise 03Lit Pao WongNo ratings yet
- HW III 14s15049 Nikolas Eii Te2 Nimganjil 2017Document9 pagesHW III 14s15049 Nikolas Eii Te2 Nimganjil 2017KOKONo ratings yet
- Ch-7 Alternating CurrentDocument55 pagesCh-7 Alternating CurrentSanjay YadavNo ratings yet
- THE6 Solution EE312 20192 Upd2Document5 pagesTHE6 Solution EE312 20192 Upd2Efe Berkay YitimNo ratings yet
- Assignment 5Document4 pagesAssignment 5Daniyal MasoodNo ratings yet
- Bài Tập Ước Lượng C12346Document55 pagesBài Tập Ước Lượng C12346Nguyễn Viết DươngNo ratings yet
- Lab 3Document7 pagesLab 3ARSLAN HAIDERNo ratings yet
- Mitac 8575aDocument219 pagesMitac 8575aJuan BravoNo ratings yet
- Moving Magnet Rev 3Document1 pageMoving Magnet Rev 3Onet DorelNo ratings yet
- ABB Drives: Installation and Start-Up GuideDocument64 pagesABB Drives: Installation and Start-Up Guidedorin serbanNo ratings yet
- 15A99301 Basic Electrical and Electronics Engineering - 3 PDFDocument2 pages15A99301 Basic Electrical and Electronics Engineering - 3 PDFMadhuSudanNo ratings yet
- AppendicesDocument11 pagesAppendicesLIEW HUI FANG UNIMAPNo ratings yet
- CC1130 FSK RF Module, 410-510Mhz, 860-960Mhz: Technical SpecificationsDocument2 pagesCC1130 FSK RF Module, 410-510Mhz, 860-960Mhz: Technical SpecificationsHe KantaNo ratings yet
- DR5800-2 ServiceManua01Document61 pagesDR5800-2 ServiceManua01Daniel Fernando Sotelo LagosNo ratings yet
- Go BCM6338Document2 pagesGo BCM63382011_gigiNo ratings yet
- CDBA220-HF Thru. CDBA2100-HF: SMD Schottky Barrier RectifiersDocument4 pagesCDBA220-HF Thru. CDBA2100-HF: SMD Schottky Barrier Rectifierscatsoithahuong84No ratings yet
- Guid - Volume Atenuator and Source SelectionDocument23 pagesGuid - Volume Atenuator and Source SelectionDementia AlexNo ratings yet
- Soln Tut1 Ee5313 2016Document6 pagesSoln Tut1 Ee5313 2016Priya ApteNo ratings yet
- ZVEX Fat Fuzz Factory InstructionsDocument1 pageZVEX Fat Fuzz Factory InstructionsMarcio PereiraNo ratings yet
- Delta0014 - Test Program and Instruction For RT 1-3kVA - PDFDocument10 pagesDelta0014 - Test Program and Instruction For RT 1-3kVA - PDFWalter Achaya LevaNo ratings yet
- Lab-Foy2 - I NgilizceDocument19 pagesLab-Foy2 - I NgilizceozturkbarantunaNo ratings yet
- 2016 12 02 (I Iib) TDocument31 pages2016 12 02 (I Iib) TnsiyamNo ratings yet
- Ball Mill Sensor PDFDocument2 pagesBall Mill Sensor PDFRaviKumarNo ratings yet
- Course Title: Power Electronics Course Code: 5032 Course Category: A Periods/Week: 4 Periods/Semester: 52 Credits: 4 Time ScheduleDocument4 pagesCourse Title: Power Electronics Course Code: 5032 Course Category: A Periods/Week: 4 Periods/Semester: 52 Credits: 4 Time ScheduleAdvanced Vocational Training System kalamasseryNo ratings yet
- Borneras ChintDocument2 pagesBorneras ChintGina Moron MoronNo ratings yet
- Topswitch: FamilyDocument21 pagesTopswitch: FamilyGuilherme Ribeiro BarbosaNo ratings yet
- WISE Investments: Electrical Engineering LabDocument21 pagesWISE Investments: Electrical Engineering LabPrabakaran EllaiyappanNo ratings yet
- Tugas 2 PDFDocument3 pagesTugas 2 PDFRahmatNo ratings yet
- Paradox Spectra RTX3 Programming/Reference ManualDocument2 pagesParadox Spectra RTX3 Programming/Reference ManualHayden WilsonNo ratings yet
- Lab 8Document9 pagesLab 8hamoodNo ratings yet
- Service Manual: Colour LCD TelevisionDocument56 pagesService Manual: Colour LCD Televisionnitin9860No ratings yet
- Chapter - 1Document13 pagesChapter - 1lvsaruNo ratings yet
- WEG cfw500 Referencia Rapida Dos Parametros 10001278059 1.5x Guia Rapido Portugues BR PDFDocument80 pagesWEG cfw500 Referencia Rapida Dos Parametros 10001278059 1.5x Guia Rapido Portugues BR PDFAllanLeiteNo ratings yet
- Tas 5708Document56 pagesTas 5708CrisNo ratings yet
- DX DiagDocument15 pagesDX DiagAmit RathoreNo ratings yet