You might also like
- Design and Implementation of A Hybrid Electric BikeDocument85 pagesDesign and Implementation of A Hybrid Electric BikeNeacsu EugenNo ratings yet
- SD Series Digital Ac Servo System User Manual: (Third Page)Document39 pagesSD Series Digital Ac Servo System User Manual: (Third Page)marcos antonio santos100% (1)
- MSC JQ1165 ElectricsDocument18 pagesMSC JQ1165 ElectricsEnrique Ramirez100% (2)
- Mercedes-Benz C-Class (W205) Fuse Diagram Fuse Diagram PDFDocument18 pagesMercedes-Benz C-Class (W205) Fuse Diagram Fuse Diagram PDFDevi Sharan PrajapatiNo ratings yet
- Nonuniformity Correction and Correctability of Ir Fpa Schulz1995Document15 pagesNonuniformity Correction and Correctability of Ir Fpa Schulz1995sapa3No ratings yet
- G9 Encoder SetupDocument4 pagesG9 Encoder SetupEnrique MalmaNo ratings yet
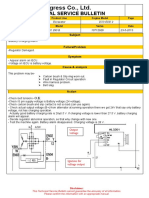
- Win Progress Co., LTD.: Technical Service BulletinDocument2 pagesWin Progress Co., LTD.: Technical Service BulletinKo ZayNo ratings yet
- PG Feedback Vector Control (Speed) : Application Guideline 14.2Document4 pagesPG Feedback Vector Control (Speed) : Application Guideline 14.2Ari SutejoNo ratings yet
- Watchdog Super Elite Manual PDFDocument68 pagesWatchdog Super Elite Manual PDFRAFAEL JIMENEZNo ratings yet
- GV-Video Server QuickGuideDocument39 pagesGV-Video Server QuickGuideacepmardiyanaNo ratings yet
- This Section Explains The Drive Circuit DesignDocument11 pagesThis Section Explains The Drive Circuit DesignSandeep SNo ratings yet
- Dynamic Analysis of Camshaft VibrationsDocument5 pagesDynamic Analysis of Camshaft VibrationsYuva NNo ratings yet
- Easy Start Guide: WEG CFW-08 Frequency InverterDocument16 pagesEasy Start Guide: WEG CFW-08 Frequency Inverteralejandro manNo ratings yet
- MethodologyDocument6 pagesMethodologyShafayet UddinNo ratings yet
- Gemini DC Swing ManualDocument22 pagesGemini DC Swing ManualDerek Alan BlountNo ratings yet
- ALVAREZ, John Edriane A - Experiment No. 1Document7 pagesALVAREZ, John Edriane A - Experiment No. 1John Edriane AlvarezNo ratings yet
- Volvo VN VHD Version 2 Electrical Schematic From Build Date 4 04Document10 pagesVolvo VN VHD Version 2 Electrical Schematic From Build Date 4 04william100% (43)
- Fuji Elect Gate Drive CircuitsDocument11 pagesFuji Elect Gate Drive CircuitskristechnikNo ratings yet
- ERA EXCHANGE Guide to Electrical RebuildingDocument5 pagesERA EXCHANGE Guide to Electrical RebuildingdaveNo ratings yet
- Table of Content: Page NoDocument3 pagesTable of Content: Page NoShubham prajeshNo ratings yet
- Axpert VM Iii5000Document33 pagesAxpert VM Iii5000Muhammad IsmailNo ratings yet
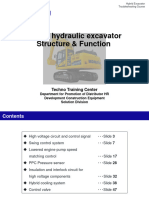
- Hybrid Excavator Structure & FunctionDocument49 pagesHybrid Excavator Structure & Functiontransjakarta0123No ratings yet
- Timing Calibration C7 EngineDocument8 pagesTiming Calibration C7 EngineNartoNo ratings yet
- BJ 2003aebposition ControllerDocument9 pagesBJ 2003aebposition ControllerDiana Amaya NatividadNo ratings yet
- Ev Charging StationDocument30 pagesEv Charging StationMayur LadwaNo ratings yet
- DYN2 Brake Wiring Test GuideDocument1 pageDYN2 Brake Wiring Test GuideHenrik Sandaker PalmNo ratings yet
- FK4220 Electrical Alternator 91Document3 pagesFK4220 Electrical Alternator 91Wagner GuimarãesNo ratings yet
- Control Lab Report Experiment No. 02 PDFDocument10 pagesControl Lab Report Experiment No. 02 PDFSiam HasanNo ratings yet
- Inverting Programmable Gain Amplifier (PGA - Inv) : FeaturesDocument7 pagesInverting Programmable Gain Amplifier (PGA - Inv) : Featuresgoogle manNo ratings yet
- Bomag Bw100 120 Service TrainingDocument10 pagesBomag Bw100 120 Service TrainingMarcelle100% (55)
- Generator Details ReportDocument1 pageGenerator Details Reportwaseem kausarNo ratings yet
- Instruction Sheet 734 111: Set of Machines 10 WDocument2 pagesInstruction Sheet 734 111: Set of Machines 10 WBassmala BaraaNo ratings yet
- Power OutletsDocument7 pagesPower Outletsmebarki aberraoufNo ratings yet
- Dokumentacja Wciągnika PDFDocument24 pagesDokumentacja Wciągnika PDFmatianNo ratings yet
- User Manual PowerRayDocument36 pagesUser Manual PowerRayMitchell DanielsNo ratings yet
- Ame 3L Experiment 5 To Perform Speed Control of DC Motor by Using Ward-Leonard Method of Speed Control AIMDocument12 pagesAme 3L Experiment 5 To Perform Speed Control of DC Motor by Using Ward-Leonard Method of Speed Control AIMCeline Kate BentayaoNo ratings yet
- Experiment N O - 1 8: Shunt Motor Characteristics PurposeDocument7 pagesExperiment N O - 1 8: Shunt Motor Characteristics PurposeMaranNo ratings yet
- 1608273575699Document50 pages1608273575699Muhammad FaqihuddinNo ratings yet
- DVR2000E Training - SECT #1 (Overview)Document41 pagesDVR2000E Training - SECT #1 (Overview)Anonymous uEt1sNhU7lNo ratings yet
- Owner's ManualDocument44 pagesOwner's ManualVikas ChandraNo ratings yet
- 2015 MY Transit Reverse Signal AccessDocument7 pages2015 MY Transit Reverse Signal AccessdariiosilvaNo ratings yet
- Part 1 - CEMIG, Brazil SpecificationDocument30 pagesPart 1 - CEMIG, Brazil SpecificationHenrique ReisNo ratings yet
- Control System Lab Manual (EE-324-FDocument52 pagesControl System Lab Manual (EE-324-FMohammad Umar RehmanNo ratings yet
- Easy Start Guide: WEG CFW300 Frequency InverterDocument15 pagesEasy Start Guide: WEG CFW300 Frequency InverterJoel Borges BrasilNo ratings yet
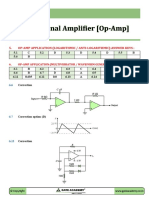
- Op Amp Application (Logarithmic / Anti Logarithmic) Answer KeysDocument15 pagesOp Amp Application (Logarithmic / Anti Logarithmic) Answer KeysAlpha VictorNo ratings yet
- Foreword: 'V' Family! You Are Now The Proud Owner of The New Bajaj V15 / V12Document40 pagesForeword: 'V' Family! You Are Now The Proud Owner of The New Bajaj V15 / V12Hussain MohtashamNo ratings yet
- Schematic 1. Basic ZVS DriverDocument23 pagesSchematic 1. Basic ZVS DriverRoberto AlejandroNo ratings yet
- Transfer Case NVG 246Document342 pagesTransfer Case NVG 246Cesar Augusto GalloNo ratings yet
- 300HP 3-Phase Motor Data SheetDocument6 pages300HP 3-Phase Motor Data Sheetjulio100% (1)
- Large Scale Commercial Solution: Three Phase Grid-Tied Solar InverterDocument4 pagesLarge Scale Commercial Solution: Three Phase Grid-Tied Solar InverterVictor BiacoloNo ratings yet
- Invertek Optidrive E2 Single Phase ManualDocument28 pagesInvertek Optidrive E2 Single Phase ManualNick ConstantinNo ratings yet
- PV776 20040447Document208 pagesPV776 20040447rpmjasa0No ratings yet
- MID 039 - CID 1190 - FMI 04: TroubleshootingDocument5 pagesMID 039 - CID 1190 - FMI 04: TroubleshootingMechanical departmentNo ratings yet
- Easy Start Guide LS IC5Document15 pagesEasy Start Guide LS IC5Arvind KumarNo ratings yet
- Gemini 24V Swing Manual 2018Document23 pagesGemini 24V Swing Manual 2018efNo ratings yet
- s200 Manual v1.1 (Veichi)Document43 pagess200 Manual v1.1 (Veichi)INFO TOP SKYNo ratings yet
- Digital Power Electronics and ApplicationsFrom EverandDigital Power Electronics and ApplicationsRating: 3.5 out of 5 stars3.5/5 (3)
- Formation Control of Multi-Agent Systems: A Graph Rigidity ApproachFrom EverandFormation Control of Multi-Agent Systems: A Graph Rigidity ApproachNo ratings yet
- Circuit Cellar 354 2020-01Document84 pagesCircuit Cellar 354 2020-01romanNo ratings yet
- Relativistic Electrodynamics NotesDocument13 pagesRelativistic Electrodynamics NotesPritika SabharwalNo ratings yet
- Lightweight AP - Registration To WLC PDFDocument15 pagesLightweight AP - Registration To WLC PDFAnasham TegegnNo ratings yet
- EQUIPMENT DATA SHEET Self Propelled Skidding SystemsDocument15 pagesEQUIPMENT DATA SHEET Self Propelled Skidding Systemsmathew1965No ratings yet
- Peugeot All Models Wiring Diagrams - GeneralDocument32 pagesPeugeot All Models Wiring Diagrams - GeneralFitra AhmadNo ratings yet
- Sivision DigitalDocument12 pagesSivision Digitalbogdan_h2000No ratings yet
- Zeek Case StudyDocument4 pagesZeek Case StudysuryanshNo ratings yet
- Base Design - SecondaryDocument20 pagesBase Design - SecondaryFarah Diba Pos-PosNo ratings yet
- USAS 856.1-1969 Safety Standard for Powered Industrial TrucksDocument65 pagesUSAS 856.1-1969 Safety Standard for Powered Industrial TrucksRethfo A Riquelme Castillo100% (1)
- Gujarati BookDocument3 pagesGujarati BookManuel Antonio Díaz FloresNo ratings yet
- Safety Solenoid Valve Nominal Width RP 1/2 - RP 2 SV SV-D Sv-DleDocument8 pagesSafety Solenoid Valve Nominal Width RP 1/2 - RP 2 SV SV-D Sv-DleAgustantoNo ratings yet
- MS2680-2017 Energy Efficiency and Use of Renewable Energy For Residential BuildingsDocument61 pagesMS2680-2017 Energy Efficiency and Use of Renewable Energy For Residential BuildingsChern Yue EweNo ratings yet
- Benefits of Using FlowchartsDocument14 pagesBenefits of Using FlowchartsDave FlautaNo ratings yet
- Raynoise Manual Rn31Document377 pagesRaynoise Manual Rn31Jay JayNo ratings yet
- Java MCQDocument6 pagesJava MCQDeepika VashisthNo ratings yet
- Line and Plan in 3DDocument31 pagesLine and Plan in 3DMing Fong LiawNo ratings yet
- L1 Course IntroductionDocument16 pagesL1 Course Introductionchinazasomto02No ratings yet
- How To Use Intelligent L.C.D.S: Constructional FeatureDocument0 pagesHow To Use Intelligent L.C.D.S: Constructional FeatureNelu Sabie100% (1)
- Checklist On Continuous Ambulatory Peritoneal Dialysis (Capd)Document3 pagesChecklist On Continuous Ambulatory Peritoneal Dialysis (Capd)Sheryl Ann Barit PedinesNo ratings yet
- CD Player State DiagramDocument14 pagesCD Player State DiagramCfhunSaatNo ratings yet
- Jackson 4 10 Homework Solution PDFDocument5 pagesJackson 4 10 Homework Solution PDFarmhein64No ratings yet
- CAM GuideDocument10 pagesCAM Guideio1_roNo ratings yet
- Novel zero-current switching PWM converters minimize lossesDocument6 pagesNovel zero-current switching PWM converters minimize lossescarlos_eqnNo ratings yet
- Some Mathematical AnagramsDocument4 pagesSome Mathematical AnagramsSergiu CoditoNo ratings yet
- Designing a Power Substation to Support Industry Growth in Russia's Prionezhsky RegionDocument95 pagesDesigning a Power Substation to Support Industry Growth in Russia's Prionezhsky Regionatorresh090675100% (1)
- Simatic WinCC Professional Brochure 29052018 PDFDocument48 pagesSimatic WinCC Professional Brochure 29052018 PDFSriram SriNo ratings yet
- A Survey On Forecasting of Time Series DataDocument8 pagesA Survey On Forecasting of Time Series DataLinh PhamNo ratings yet
- An Overview of The Ansi Z359 Fall Protection Code: FEBRUARY 16, 2018Document24 pagesAn Overview of The Ansi Z359 Fall Protection Code: FEBRUARY 16, 2018isabel Cristina Agresott TorresNo ratings yet
- Android KMSGDocument62 pagesAndroid KMSGraimanalmughnii67No ratings yet