You might also like
- 24593-48286-1-PBAutonomous VehiclesDocument10 pages24593-48286-1-PBAutonomous VehiclesChaNo ratings yet
- Advanced Driver Assistance Systems: AbstractDocument8 pagesAdvanced Driver Assistance Systems: AbstractKrishnal NairNo ratings yet
- Autonomous Vehicles On The EdgeDocument32 pagesAutonomous Vehicles On The EdgeNazmus SaquibNo ratings yet
- Low Cost Intelligent Braking SystemDocument8 pagesLow Cost Intelligent Braking SystemTeam LegendsNo ratings yet
- J Software Evolu Process - 2018 - MessnarzDocument14 pagesJ Software Evolu Process - 2018 - Messnarz1730203No ratings yet
- Zie Binsk I 2016Document12 pagesZie Binsk I 2016Yojith KRNo ratings yet
- ADAS ReportDocument14 pagesADAS ReportRudraksh ShuklaNo ratings yet
- A Survey of Autonomous Driving, Common Practices and Emerging TechnologiesDocument27 pagesA Survey of Autonomous Driving, Common Practices and Emerging TechnologiesFang YuanNo ratings yet
- Connected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeFrom EverandConnected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeNo ratings yet
- Embedded Systems in Automobiles: Conference PaperDocument7 pagesEmbedded Systems in Automobiles: Conference Paperjnamdev668No ratings yet
- Sensors 18 00366 PDFDocument21 pagesSensors 18 00366 PDFAgoeng NoegrossNo ratings yet
- 2023 OBD In-Vehicle - Sensing - For - Smart - CarsDocument22 pages2023 OBD In-Vehicle - Sensing - For - Smart - CarssujayNo ratings yet
- Automated Highway ReportDocument3 pagesAutomated Highway ReportPrathmesh DeshpandeNo ratings yet
- A Review of Sensor Technologies For Perception in Automated DrivingDocument14 pagesA Review of Sensor Technologies For Perception in Automated DrivingAldo OsorioNo ratings yet
- Self Driving CarDocument7 pagesSelf Driving CarIJRASETPublicationsNo ratings yet
- Opening ReportDocument18 pagesOpening ReportKhamraev AzamatNo ratings yet
- Review Paper On Automatic Braking System With Pneumatic Bumper-IJAERDV04I1219673Document3 pagesReview Paper On Automatic Braking System With Pneumatic Bumper-IJAERDV04I1219673Viknesh VikneshNo ratings yet
- Robovis AccDocument11 pagesRobovis AccCESIA ISABEL MORENO HERNANDEZNo ratings yet
- A Review of Sensor Technologies For Perception in Automated DrivingDocument14 pagesA Review of Sensor Technologies For Perception in Automated Driving5adjcourt allagaddaNo ratings yet
- Hfes BMW Abk PreprintDocument6 pagesHfes BMW Abk PreprintJhonatan Lizcano ArteagaNo ratings yet
- A Survey of Autonomous Driving:: Common Practices and Emerging TechnologiesDocument28 pagesA Survey of Autonomous Driving:: Common Practices and Emerging TechnologiesVishal ManwaniNo ratings yet
- IET2016 Gvelez Ootaegui PostprintDocument30 pagesIET2016 Gvelez Ootaegui Postprintelizabarzi73No ratings yet
- ReviewofADAS PreprintDocument6 pagesReviewofADAS PreprintShivaji Bhausaheb ThoratNo ratings yet
- Universal Detection-Based Driving Assistance Using A Mono Camera With Jetson DevicesDocument13 pagesUniversal Detection-Based Driving Assistance Using A Mono Camera With Jetson DevicesVinh Lê HữuNo ratings yet
- Research Paper On Adaptive Cruise ControlDocument4 pagesResearch Paper On Adaptive Cruise Controlmqolulbkf100% (1)
- Driver Assistance Technology Is Emerging As New Driving Technology Popularly Known As ADASDocument3 pagesDriver Assistance Technology Is Emerging As New Driving Technology Popularly Known As ADASyadelew likinaNo ratings yet
- Seminar Report AnkitDocument28 pagesSeminar Report AnkitBharat PanwarNo ratings yet
- A Systematic Literature Review of The Factors Influencing The Adoption of Autonomous DrivingDocument18 pagesA Systematic Literature Review of The Factors Influencing The Adoption of Autonomous Drivingvinoham666No ratings yet
- Adaptive Cruise Control Research Paper 1Document11 pagesAdaptive Cruise Control Research Paper 1Raj SomaiyaNo ratings yet
- Collision Avoidance Systems For Vehicle Safety Using Ultrasonic Distance Sensing Eye Blink Sensor and Alcohol DetectorDocument9 pagesCollision Avoidance Systems For Vehicle Safety Using Ultrasonic Distance Sensing Eye Blink Sensor and Alcohol DetectorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Survey of Technical Trends of ADAS and Autonomous DrivingDocument4 pagesA Survey of Technical Trends of ADAS and Autonomous DrivingFang YuanNo ratings yet
- Design of Vehicle Accident Prevention System Using Wireless TechnologyDocument8 pagesDesign of Vehicle Accident Prevention System Using Wireless TechnologyParam SinghNo ratings yet
- Admin, ID 3810 New FileDocument19 pagesAdmin, ID 3810 New FileRDNo ratings yet
- Advanced Driver Assistant System (ADAS) A Review of System and TechnologiesDocument4 pagesAdvanced Driver Assistant System (ADAS) A Review of System and TechnologiesVu Dinh VanNo ratings yet
- Autonomous Vehicles On The Edge A Survey On Autonomous Vehicle RacingDocument31 pagesAutonomous Vehicles On The Edge A Survey On Autonomous Vehicle RacingGergely HornyakNo ratings yet
- Impacts of Autonomous Cars From A Traffic Engineering PerspectiveDocument8 pagesImpacts of Autonomous Cars From A Traffic Engineering PerspectiveFestNo ratings yet
- The Multibody Systems Approach to Vehicle DynamicsFrom EverandThe Multibody Systems Approach to Vehicle DynamicsRating: 5 out of 5 stars5/5 (2)
- A Literature Review On Collision Avoidance in Vehicles Using CANDocument5 pagesA Literature Review On Collision Avoidance in Vehicles Using CANIJRASETPublicationsNo ratings yet
- Self-Driving Car Ecosystem As A Complex System: January 2021Document6 pagesSelf-Driving Car Ecosystem As A Complex System: January 2021tusila16No ratings yet
- Drowsiness Detection and Alert SystemDocument7 pagesDrowsiness Detection and Alert Systemgoutham pNo ratings yet
- SALI - FinalReport On Driverless CarDocument12 pagesSALI - FinalReport On Driverless CarAfroz Alam Ki VinesNo ratings yet
- Automated HIGhway SYStem CPP ProjectDocument88 pagesAutomated HIGhway SYStem CPP ProjectDurvank ShethNo ratings yet
- Studying On The Design and Simulation of Collision Protection System Between Vehicle and PedestrianDocument9 pagesStudying On The Design and Simulation of Collision Protection System Between Vehicle and PedestrianMario BritoNo ratings yet
- Sensors 23 00814 v4Document30 pagesSensors 23 00814 v4Adnane BaraghenNo ratings yet
- Major Project - PPTX - Design and Assembly of Intelligent Braking SystemDocument16 pagesMajor Project - PPTX - Design and Assembly of Intelligent Braking SystemAditya KobbaiNo ratings yet
- Dependency On Complex Algorithms For Decision Making in Vehicle TechnologyDocument5 pagesDependency On Complex Algorithms For Decision Making in Vehicle TechnologyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Applsci 10 02749 v2Document29 pagesApplsci 10 02749 v2حسام جعفر كاظمNo ratings yet
- Modern TrafficDocument13 pagesModern TrafficAWINASHNo ratings yet
- Road Accident Analysis and Prediction Using Machine LearningDocument6 pagesRoad Accident Analysis and Prediction Using Machine LearningTefeNo ratings yet
- Sample Seminar Report For ReferenceDocument20 pagesSample Seminar Report For Referencerayyanop2005No ratings yet
- Car Parking Automation and Premises Security SystemDocument7 pagesCar Parking Automation and Premises Security SystemIJRASETPublicationsNo ratings yet
- Self Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningDocument8 pagesSelf Driving Car Using Raspberry Pi: Keywords:Raspberry Pi, Lane Detection, Obstacle Detection, Opencv, Deep LearningKrishna KrishNo ratings yet
- Securware 2019 6 30 30045Document7 pagesSecurware 2019 6 30 30045cleberkafferNo ratings yet
- Challenges in Vehicle Ad Hoc Network (VANET) : December 2014Document14 pagesChallenges in Vehicle Ad Hoc Network (VANET) : December 2014AYUSH KUMARNo ratings yet
- Self-Driving Cars - The Human Side: November 2017Document7 pagesSelf-Driving Cars - The Human Side: November 2017Bhavesh soni BkkcNo ratings yet
- A Technical Paper Review On Vehicle Tracking System: March 2020Document8 pagesA Technical Paper Review On Vehicle Tracking System: March 2020ABDUL MOHSINNo ratings yet
- The Development of A Self-Driving BusDocument10 pagesThe Development of A Self-Driving BusInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Estudio Del ITS, Diferentes Tipos e Investigaciones, ResultadosDocument7 pagesEstudio Del ITS, Diferentes Tipos e Investigaciones, ResultadosGian StarkNo ratings yet
- CodeDocument7 pagesCodeMutasem RedaNo ratings yet
- EngineDocument84 pagesEngineMutasem RedaNo ratings yet
- AdasDocument4 pagesAdasMutasem RedaNo ratings yet
- ICCT NAengines 201606Document16 pagesICCT NAengines 201606Mutasem RedaNo ratings yet
- AutomotiveDocument5 pagesAutomotiveMutasem RedaNo ratings yet
- ADAS From Autonomous To Cooperative ApproachDocument27 pagesADAS From Autonomous To Cooperative ApproachMutasem RedaNo ratings yet
- 车种 车型 发动机型式 Denso IridiumDocument1 page车种 车型 发动机型式 Denso IridiumMutasem RedaNo ratings yet
- Noncooperative Model Predictive Control For Affine-Quadratic GamesDocument2 pagesNoncooperative Model Predictive Control For Affine-Quadratic GamesMutasem RedaNo ratings yet
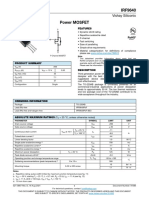
- Irf 9640Document8 pagesIrf 9640Saeid AbraziNo ratings yet
- Assessment Guidelines For Processing Operations Hydrocarbons VQDocument47 pagesAssessment Guidelines For Processing Operations Hydrocarbons VQMatthewNo ratings yet
- Problematical Recreations 5 1963Document49 pagesProblematical Recreations 5 1963Mina, KhristineNo ratings yet
- Farm Gate TasmaniaDocument20 pagesFarm Gate TasmaniaplouffrNo ratings yet
- Project ProposalDocument1 pageProject ProposalLadee ClaveriaNo ratings yet
- Bebras2021 BrochureDocument5 pagesBebras2021 BrochureJeal Amyrrh CaratiquitNo ratings yet
- List of Holidays 2019Document1 pageList of Holidays 2019abhishek ranaNo ratings yet
- Dairy IndustryDocument11 pagesDairy IndustryAbhishek SharmaNo ratings yet
- VW Aircraft Engine Building - Bob HooverDocument133 pagesVW Aircraft Engine Building - Bob Hooverjwzumwalt100% (4)
- Engg 135 Design of Reinforced Concrete Structures: Bond and Bar Development Reading: Wight and Macgregor Chapter 8Document24 pagesEngg 135 Design of Reinforced Concrete Structures: Bond and Bar Development Reading: Wight and Macgregor Chapter 8Manuel MirandaNo ratings yet
- Specifications: Back2MaintableofcontentsDocument31 pagesSpecifications: Back2MaintableofcontentsRonal MoraNo ratings yet
- Bethany Pinnock - Denture Care Instructions PamphletDocument2 pagesBethany Pinnock - Denture Care Instructions PamphletBethany PinnockNo ratings yet
- Kangar 1 31/12/21Document4 pagesKangar 1 31/12/21TENGKU IRSALINA SYAHIRAH BINTI TENGKU MUHAIRI KTNNo ratings yet
- Fogarty HardwickDocument35 pagesFogarty HardwickBen KellerNo ratings yet
- Research EssayDocument8 pagesResearch Essayapi-509696875No ratings yet
- 2017 Ecatalogue Howtim Exit SignDocument38 pages2017 Ecatalogue Howtim Exit SignSatish Phakade-PawarNo ratings yet
- The Exalted Evening Litany of The Great Pir Nureddin Jerrahi May His Holy Secret Be VictoriousDocument23 pagesThe Exalted Evening Litany of The Great Pir Nureddin Jerrahi May His Holy Secret Be Victoriousnazemuddeen100% (1)
- EPM Key Design Decisions - Design PhaseDocument7 pagesEPM Key Design Decisions - Design PhaseVishwanath GNo ratings yet
- The Cornerstones of TestingDocument7 pagesThe Cornerstones of TestingOmar Khalid Shohag100% (3)
- IPASO1000 - Appendix - FW Download To Uncurrent SideDocument11 pagesIPASO1000 - Appendix - FW Download To Uncurrent SidesaidbitarNo ratings yet
- Lesson10 Sacraments of InitiationDocument76 pagesLesson10 Sacraments of InitiationInsatiable CleeNo ratings yet
- 22 Habits of Unhappy PeopleDocument2 pages22 Habits of Unhappy PeopleKlEər OblimarNo ratings yet
- Interpretive Dance RubricDocument1 pageInterpretive Dance RubricWarren Sumile67% (3)
- Case 1 - Mr. ReyesDocument3 pagesCase 1 - Mr. ReyesJasper Andrew AdjaraniNo ratings yet
- Lesson On Inferring Tone and MoodDocument32 pagesLesson On Inferring Tone and MoodAngel PabilloNo ratings yet
- BBS of Lintel Beam - Bar Bending Schedule of Lintel BeamDocument5 pagesBBS of Lintel Beam - Bar Bending Schedule of Lintel BeamfelixNo ratings yet
- WHO SOPs Terms DefinitionsDocument3 pagesWHO SOPs Terms DefinitionsNaseem AkhtarNo ratings yet
- Gaffney S Business ContactsDocument6 pagesGaffney S Business ContactsSara Mitchell Mitchell100% (1)
- Lynker Technologies LLC U.S. Caribbean Watershed Restoration and Monitoring Coordinator - SE US Job in Remote - GlassdoorDocument4 pagesLynker Technologies LLC U.S. Caribbean Watershed Restoration and Monitoring Coordinator - SE US Job in Remote - GlassdoorCORALationsNo ratings yet
- Treinamento DENSODocument65 pagesTreinamento DENSOjoao mariaNo ratings yet
- The Constitution Con by Michael TsarionDocument32 pagesThe Constitution Con by Michael Tsarionsilent_weeper100% (1)