Professional Documents
Culture Documents
EM01301C
EM01301C
Uploaded by
Tomy lee youngCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
EM01301C
EM01301C
Uploaded by
Tomy lee youngCopyright:
Available Formats
4 Els robots a la indústria
4.1 Evolució del parc de robots industrials
Un dels índexs sobre el grau d'automatització avançada d'un país el consti-tueix
el parc de robots industrials instal·lats i la seva evolució. A continuació es
proporcionen dades sobre l'evolució del parc a diferents països industrials.
Aquesta informació ha estat elaborada a partir de les dades recollides
anualment per diferents països desenvolupats sota la coordinació de la
International Federation of Robotics (IFR). L'últim recull porta la data de juny
de 1992 i inclou les dades de finals de l'any 1991.
Els aspectes més rellevants que es resumeixen a les taules que vénen a
continuació són:
Parc de robots industrials instal·lats (Taula 1). S'han pres en consideració
aquells països que, a finals de 1991, tenien un parc de robots industrials
superior a les 1.000 unitats instal·lades.
Increment anual del parc. Aquestes dades es proporcionen tant de l'incre-ment
del nombre d'unitats (Taula 2), com del percentatge d'aquest incre-ment sobre
el parc de l'any anterior (Taula 3).
Parc de robots industrials, segons els subministradors. Es disposa d'aques-tes
dades sobre dos països: Austràlia, per a 1990; i Espanya, per a 1991, amb
l'increment dels anys 1988-1991 (Taula 4).
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 9
© Els autors, 1998; © Edicions UPC, 1998. Són rigorosament prohibides, sense l'autorització escrita dels titulars del copyright, sota les sancions establertes a la llei, la
reproducció total o parcial d'aquesta obra per qualsevol procediment, inclosos la reprografia i el tractament informàtic, i la distribució d'exemplars mitjançant lloguer o
préstec públics.
4 ELS ROBOTS A LA INDÚSTRIA 4.1 EVOLUCIÓ DEL PARC DE ROBOTS INDUSTRIALS
Taula 1
1 Parc de robots industrials instal·lats a diferents països
1984 1985 1986 1987 1988 1989 1990 1991
Austràlia 530 ? 800 930 1.200 1.350 1.490 1.650
Àustria 180 260 370 480 680 880 1.180 1.350
Alemanya,R.F. 6.600 8.800 12.400 14.900 17.700 22.400 28.240 34.140
Bèlgica 780 980 1.040 1.120 1.230 1.400 1.600 ?
Espanya 530 690 860 1.150 1.420 1.750 2.220 2.630
Estats Units 13.000 20.000 25.000 29.000 32.600 37.000 41.300 ?
França1 2.750 4.150 5.270 4.380 5.660 7.860 8.550 9.810
Gran Bretanya 2.620 3.210 3.680 4.300 5.030 5.910 6.420 7.170
Itàlia 2.600 4.000 5.000 6.600 8.300 9.980 12.500 14.540
Holanda 140 310 450 590 720 890 1.070 ?
Japó 67.000 97.000 116.000 141.000 176.000 219.000 274.000 325.000
Singapur 120 200 250 530 610 1.390 ? ?
Suècia 1.750 2.050 2.390 2.750 3.040 3.460 3.790 4.100
Suïssa 190 290 380 500 780 ? 1.520 ?
Taiwan 150 230 290 450 680 970 1.290 1.670
Txecoslovàquia2 ? 1.700 2.770 4.050 5.650 6.770 7.160 7.210
Unió Soviètica2 ? 34.070 44.070 53.120 59.220 62.340 64.200 ?
Estimació món ? ? ? ? 340.000 405.000 480.000 550.000
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
1
El 1989 es va procedir a una revisió de l'estadística de robots tenint en compte les noves definicions
d'ISO i d'IFR.
2
No s'han establert definicions comparables.
10 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.1 EVOLUCIÓ DEL PARC DE ROBOTS INDUSTRIALS
Taula 2
2 Increment del parc de robots industrials a diferents països
1984 1985 1986 1987 1988 1889 1990 1991
Austràlia ? ? ? 130 270 150 140 160
Àustria 50 80 110 110 200 200 300 170
Alemanya,R.F. 1.800 2.200 3.600 2.500 2.800 4.700 5.840 5.900
Bèlgica 270 200 60 80 110 170 200 ?
Espanya 100 160 170 290 270 330 470 410
Estats Units 5.000 7.000 5.000 4.000 3.600 4.400 4.300 ?
França1 830 1.400 1.120 - 890 1.280 2.200 690 1.260
Gran Bretanya 870 590 470 620 730 880 510 750
Itàlia 1.090 1.400 1.000 1.600 1.700 1.680 2.520 2.040
Holanda 20 170 140 140 130 170 180 ?
Japó 20.000 30.000 19.000 25.000 35.000 43.000 55.000 51.000
Singapur 50 80 50 280 80 780 ? ?
Suècia 300 300 340 360 290 420 330 310
Suïssa 80 100 90 120 280 ? ? ?
Taiwan 70 80 60 160 230 290 320 380
Txecoslovàquia2 ? ? 1.070 1.280 1.600 1.120 390 50
Unió Soviètica2 ? ? 10.000 9.050 6.100 3.120 1.860 ?
Estimació món ? ? ? ? ? 65.000 75.000 70.000
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
1
El 1989 es va procedir a una revisió de l'estadística de robots tenint en compte les noves
definicions d'ISO i d'IFR.
2
No s'han establert definicions comparables.
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 11
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.1 EVOLUCIÓ DEL PARC DE ROBOTS INDUSTRIALS
Taula 3
3 Increment del parc de robots industrials a diferents països
(percentual)
1984 1985 1986 1987 1988 1989 1990 1991
Austràlia ? ? ? 16,3 29,0 12,5 10,4 10,7
Àustria 38,5 44,4 42,3 29,7 41,7 29,4 34,1 14,4
Alemanya, R.F. 37,5 33,3 40,9 20,2 18,8 26,6 26,1 20,9
Bèlgica 52,9 25,6 6,1 7,7 9,8 13,8 14,3 ?
Espanya 23,3 30,2 24,6 33,7 23,5 23,2 26,9 18,5
Estats Units 62,5 53,8 25,0 16,0 12,4 13,5 11,6 ?
França1 43,2 50,9 27,0 -16,9 29,2 38,9 8,8 14,7
Gran Bretanya 49,7 22,5 14,6 16,8 17,0 17,5 8,6 11,7
Itàlia 72,2 53,8 25,0 32,0 25,8 20,2 25,3 16,32
Holanda 16,7 121,4 45,2 31,1 22,0 23,6 20,2 ?
Japó 42,6 44,8 19,6 21,6 24,8 24,4 25,1 18,6
Singapur 71,4 66,7 25,0 112,0 15,1 127,9 ? ?
Suècia 20,7 17,1 16,6 15,1 10,5 13,8 9,5 8,2
Suïssa 72,7 52,6 31,0 31,6 56,0 ? ? ?
Taiwan 87,5 53,3 26,1 55,2 51,1 42,6 33,0 29,5
Txecoslovàquia2 ? ? 62,9 46,2 39,5 19,8 5,8 0,7
Unió Soviètica2 ? ? 29,3 20,5 11,5 5,3 3,0 ?
Estimació món ? ? ? ? ? 19,1 18,5 14,6
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
1
El 1989 es va procedir a una revisió de l'estadística de robots tenint en compte les noves
definicions d'ISO i d'IFR.
2
No s'han establert definicions comparables.
12 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.1 EVOLUCIÓ DEL PARC DE ROBOTS INDUSTRIALS
Taula 4
Parc de robots industrials per marques
Parc d'Austràlia Parc d'Espanya Parc d'Espanya
maig 1990 desembre 1991 Increment 88-91
Nombre % Nombre % Nombre %
ASEA 300 22,2 1.015 38,6 525 44,3
ACMA - 190 7,2 40 3,4
Daihen / OTC 200 14,8 - - - -
GMFanuc 150 11,1 165 6,3 160 13,3
KUKA 1 60 2,0 30 2,6
Unimation 102 7,6 260 9,9 - -
Yaskawa 100 7,4 150 6,2 80 6,8
Altres marques (23) 497 36,7 (57) 665 30,3 (27) 350 29,5
Totals 1.350 100,0 2.630 100,0 1.185 100,0
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
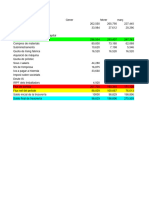
Anàlisi de les dades
L'anàlisi de les quatre taules anteriors aporta les observacions següents:
a) El parc mundial de robots industrial va superar la xifra de mig milió l'any
1991. Els creixements absoluts d'aquest parc estan sobre les 70.000
unitats en els darrers anys i sembla que inicien una inflexió a la baixa a
l'any 1991. Els percentatges d'augment, tot i ser ele-vats, van baixant
progressivament quan es comptabilitzen sobre un parc cada cop més
gran.
b) El parc japonès és, amb diferència, el més important del món i re-
presenta tot sol prop del 60% dels robots industrials instal·lats del món,
amb tendència a créixer. El mateix es pot dir de la indústria japonesa de
fabricació de robots industrials, que és exportadora.
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 13
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.1 EVOLUCIÓ DEL PARC DE ROBOTS INDUSTRIALS
c) La indústria europea de robots industrials es manté, mentre que
l'americana tendeix a baixar. Dintre d'Europa, Alemanya és, també amb
diferència, el país amb el parc de robots industrials instal·lats més gran,
amb quasi la meitat del parc europeu.
d) Espanya tenia a finals de l'any 1991 un parc de robots industrials d'unes
2.600 unitats, aproximadament un 0,5% del parc mundial, fet que no
impedeix que se situï entre els 10 primers llocs en l'àmbit mundial. El
creixement percentual és més alt que el de la mitjana del món i s'acosta
als del Japó i Alemanya.
e) Sorprèn el gran nombre d'empreses fabricants de robots industrials amb
un nombre de vendes molt baix (poques unitats per any). Sem-bla, però,
que el mercat tendeix a una concentració de l'oferta en un nombre reduït
d'empreses en l'àmbit mundial. A Espanya, i proba-blement també en el
món, les empreses líders són ABB i Fanuc.
f) La fabricació més seriada dels robots industrials, amb productes més
estàndard, va abaratint de forma relativa els preus; aquest fet, juntament
amb la millora de les prestacions (especialment quant a capacitats de
programació) i l'augment de la fiabilitat d'aquestes màquines, està
facilitant l'arribada a la maduresa de les seves aplicacions industrials.
4.2 Els robots segons les aplicacions i les activitats
Les dades referents a les aplicacions dels robots industrials, i a les acti-vitats
de les indústries destinatàries, proporciona un bon índex per avaluar les
aplicacions més madures i els sectors líders en la implantació de la robòtica.
Nova classificació de la IFR per a robots industrials
La International Federation of Robotics, IFR, ha sentit la necessitat d'esta-blir
criteris uniformes per a la recollida de dades sobre el parc de robots industrials
implantats en els diferents països, així com la seva classificació en aplicacions
i activitats. En aquest sentit, a la reunió de Sidney de l'any 1988 va prendre els
acords següents:
14 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
a) Robots industrials segons les aplicacions
Es va establir la classificació següent:
000 Sense especificar
110 Operacions de manipulació a la fosa
111 Motlles
119 Altres
130 Operacions de manipulació a l'emmotllament de plàstics
140 Operacions de manipulació en els tractaments tèrmics
150 Operacions de manipulació a l'estampació i la forja
160 Soldadura
161 Soldadura per arc
162 Soldadura per punts
163 Soldadura per gas
164 Soldadura per làser
169 Altres
170 Aplicacions de materials
171 Pintura
172 Segellament/Adhesius
179 Altres
180 Mecanització
181 Càrrega i descàrrega de màquines
182 Tallament mecànic/Rectificació/Desbarbatge/Poliment
189 Altres
190 Altres processos
191 Tallament per làser
192 Tallament per raig d'aigua
199 Altres
200 Muntatge
201 Muntatge mecànic/Unió
202 Inspecció/Muntatge/Retallada
203 Unió per mitjà d'adhesius
204 Unió per soldadura
205 Manipulació per a operacions de muntatge
209 Altres
210 Operacions de manipulació per a paletització/Empaquetatge
220 Mesurament/Inspecció/Verificació
230 Manipulació de materials
240 Formació/Ensenyament/Investigació
900 Altres
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 15
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
b) Robots industrials segons les activitats
Es va establir a partir dels codis ISIC (International Standard Indus-trial
Classification), segons la segona revisió:
0 Sense especificar
1 Agricultura/Silvicultura/Pesca
2 Mineria
3 Indústries manufactureres
31 Alimentació i begudes
32 Tèxtil/Confecció/Productes de pell
33 Fusta/Productes de fusta/Mobles
34 Paper/Productes de paper/Impressió i edició
35 Productes químics/Petroli/Carbó/Cautxú/Productes de
plàstic
36 Ceràmica/Productes de pedra/Productes minerals no
metàl·lics
37 Metalls bàsics
38 Indústria del metall
381 Productes metàl·lics (excepte maquinària)
382 Maquinària (excepte equips i aparells elèctrics)
383 Equips i aparells elèctrics
384 Equips de transport
3843 Vehicles de motor
3845 Aeronaus
385 Instruments de precisió i instruments òptics
39 Altres indústries manufactureres
4 Electricitat/Gas/Aigua
5 Construcció/Edificació
931 Educació
932 Investigació i desenvolupament
Presentació de taules
A continuació es presenten per a cada un dels països següents, Japó, Fran-ça,
Espanya i Alemanya, les dades referents a:
1) Classificació per funcions (Taules 5, 7, 9 i 11, respectivament)
2) Classificació per sectors d'activitat (Taules 6, 8 i 10 respectivament; per
a Alemanya no es disposa de dades sobre sectors d'activitat).
16 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
Taula 5
JAPÓ Classificació per funcions dels robots
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Càrrega-descàrrega 17.700 6,5 21.800 6,7 4.100 23,2
Emmotllament de plàstics 35.800 13,1 44.400 13,7 8.600 24,0
Manipulació / Paletització 9.300 3,4 10.500 3,2 1.200 12,9
Muntatge 107.400 39,2 129.300 39,8 21.900 20,4
Recobriments / Pintura 4.500 1,6 5.500 1,7 1.000 22,2
Soldadura per arc 37.800 13,8 46.100 14,2 8.300 22,0
Soldadura per punts 21.400 7,8 24.800 7,6 3.400 15,9
Altres 40.100 14,6 42.600 13,1 2.500 6,2
Totals 274.000 100,0 325.000 100,0 51.000 18,6
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
Taula 6
JAPÓ Classificació per sectors d'activitat
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Automoció 73.300 26,8 86.500 26,6 13.200 18,0
Maquinària elèctrica 97.300 35,5 115.900 35,7 18.600 19,1
Maquinària no elèctrica 40.600 14,8 47.100 14,5 6.500 16,0
Química / Plàstics 38.100 13,9 45.700 14,1 7.600 19,9
Altres 24.700 9,0 29.800 9,2 3.950 8,6
Totals 274.000 100,0 325.000 100,0 51.000 18,6
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 17
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
Taula 7
FRANÇA Classificació per funcions dels robots
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Càrrega-descàrrega 870 10,2 970 9,9 110 12,6
Emmotllament de plàstics 810 9,5 950 9,7 140 17,3
Manipulació / Paletització 1.620 18,9 1.850 18,9 230 14,2
Muntatge 1.100 12,9 1.210 12,3 110 10,0
Recobriments / Pintura 300 3,5 230 3,4 30 10,0
Soldadura per arc 1.250 14,6 1.490 15,2 240 19,2
Soldadura per punts 1.740 20,4 2.020 20,6 280 16,1
Altres 860 10,1 990 10,1 130 10,3
Totals 8.550 100,0 9.810 100,0 1.260 14,7
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
Taula 8
FRANÇA Classificació per sectors d'activitat
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Automoció 3.380 39,5 3.920 40,0 540 16,0
Maquinària elèctrica 640 7,5 670 6,8 30 4,7
Maquinària no elèctrica 1.380 16,1 1.520 15,5 140 10,1
Química / Plàstics 930 10,9 1.070 10,9 140 15,1
Altres 2.220 26,0 2.630 26,8 410 18,5
Totals 8.550 100,0 9.810 100,0 1.260 14,7
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
18 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
Taula 9
ESPANYA Classificació per funcions dels robots
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Càrrega-descàrrega 110 5,0 140 5,3 30 27,3
Emmotllament de plàstics 20 0,9 20 0,8 0 0,0
Manipulació / Paletització 330 14,9 370 14,1 40 12,1
Muntatge 160 7,2 170 6,3 10 6,3
Recobriments / Pintura 70 3,2 70 2,7 0 0,0
Soldadura per arc 530 23,9 640 24,3 110 20,8
Soldadura per punts 690 31,1 840 31,9 150 21,7
Altres 310 14,0 380 14,4 70 22,6
Totals 2.220 100,0 2.630 100,0 410 18,5
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
Taula 10
ESPANYA Classificació per sectors d'activitat
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Automoció 1.200 54,1 1.450 55,1 250 20,8
Maquinària elèctrica 120 5,4 145 5,5 25 20,8
Maquinària no elèctrica 620 27,9 710 27,0 90 14,5
Química / Plàstics 30 1,4 50 1,9 20 66,7
Altres 250 11,3 275 10,5 25 10,0
Totals 2.220 100,0 2.630 100,0 410 18,5
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 19
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
Taula 11
ALEMANYA, R.F. Classificació per funcions dels robots
Any 1990 Any 1991 Increment 90-91
Nombre % Nombre % Nombre %
Càrrega-descàrrega 3.050 10,8 3.550 10,4 500 16,4
Emmotllament de plàstics1 ? ? ? ? ? ?
Manipulació / Paletització 4.850 17,2 5.790 17,0 940 19,4
Muntatge 5.260 18,6 6.440 18,9 1.180 22,4
Recobriments / Pintura 1.210 4,3 1.380 4,0 170 14,0
Soldadura per arc 4.510 16,0 5.040 16,9 530 11,8
Soldadura per punts 4.640 16,4 5.430 15,9 790 17,0
Altres 4.720 16,7 6.510 19,1 1.790 37,9
Totals 28.240 100,0 34.140 100,0 5.900 20,9
Fonts: Recull IFR, Automatización Integrada & Revista de Robótica, i elaboració pròpia
1
Probablement estan inclosos en els de manipulació i paletització.
Anàlisi de les dades
L'anàlisi de les set taules anteriors aporta les observacions següents:
a) La gran majoria de les funcions dels robots industrials es concentren en
sis aplicacions: càrrega/descàrrega, emmotllament de plàs-tics,
manipulació/paletització, muntatge, soldadura per arc i soldadura per
punts; aquestes aplicacions representen entre un 75 i un 85% dels robots
industrials instal·lats.
b) La indústria japonesa destaca per l'alt nombre d'aplicacions de
muntatge, amb un 40% dels robots instal·lats, seguides a molta
distància per la soldadura per arc i l'emmotllament de plàstics (prop
d'un 15% cada un), que alhora tenen una dinàmica de creixement
superior a la mitjana.
c) La indústria europea representada pels tres països analitzats, per
20 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.2 ELS ROBOTS SEGONS LES APLICACIONS I LES ACTIVITATS
contra, destaca pel relatiu equilibri entre la soldadura per punts, la
manipulació/paletització, la soldadura per arc i el muntatge, en ordre
de més a menys (d'un 15 a un 11%) i les dinàmiques de crei-xement
també són de les més altes.
d) L'observació del punt b pot tenir l'explicació en el fet que l'aplicació
de robots industrials a la indústria japonesa es concentra fortament a
la maquinària elèctrica (un 35%, amb una preponderància pel
muntatge), mentre que l'automoció resta en un segon lloc (tot just
supera el 25%).
e) Per contra, l'observació del punt c pot tenir l'explicació en el fet que
l'aplicació de robots industrials en els països europeus analitzats es
concentra principalment a la indústria d'automoció (més del 40%, amb
una preponderància de soldadura per punts i per arc), mentre que la
maquinària no elèctrica és la que ocupa el segon lloc (en concentra
més d'un 15%).
f) Espanya se suma a aquesta tendència europea de la concentració en
el sector d'activitat de l'automoció (un 55%) i la reforça, fet que es
reflecteix en l'alt percentatge de robots de soldadura per punts (un
32%) i de soldadura per arc (un 24%). En els darrers anys es percep
una tendència vers la diversificació de les aplicacions de robots
industrials en el mercat espanyol.
4.3 Organitzacions sobre robòtica industrial
Associacions sobre robòtica industrial
L robòtica industrial ha suscitat una gran expectació i un gran interès en el
seu entorn. Diversos col·lectius aviat han sentit la necessitat d'impulsar
accions tals com, per exemple, la difusió de la informació, la coordinació
d'ajudes, el foment de la investigació, l'establiment de normativa, etc. S'han
format, doncs, associacions de robòtica en pràcticament tots els països
desenvolupats, les quals s'han federat per mitjà de la IFR (International
Federation of Robotics).
Les associacions més rellevants són:
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 21
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.3 ORGANITZACIONS SOBRE ROBÒTICA INDUSTRIAL
JIRA (The Japan Industrial Robot Association, creada l'octubre
1972, amb seu a Tòquio). Els industrials i investigadors del
Japó, tot i que es van incorporar relativament tard a la robòtica
(1968), van ser els primers a formar-ne una associació. Avui
dia el Japó ocupa el primer lloc indiscutit en el context de la
robòtica mundial.
RIA (Robot Institute of America, creada el juny de 1974, Michigan; el
1984 va canviar el nom per Robotic Industries Association). EUA,
país pioner en la construcció de robots industrials (1962), ha perdut
el lideratge a favor del Japó, i, probablement, també respecte a la
Comunitat Europea.
A Espanya hi ha:
AER (Asociación Española de Robótica, creada el maig de 1985,
amb seu a Barcelona). Els primers robots industrials van ser
instal·lats a SEAT (Zona Franca, Barcelona) el 1974; però la
implantació real comença ben entrats els anys 1980.
Altres associacions de robòtica, ordenades segons la data de creació, són:
SIRI (Società Italiana di Robotica Industriale, creada el 1975, amb
seu a Milà)
BRA (British Robot Association, creada el 1977, amb seu a Bir-
mingham)
AFRI (Association Française de Robotique Industrielle, creada el
1978, amb seu a París)
SWIRA (Swedish Industrial Robot Assoctiation, creada el 1980, amb
seu a Estocolm)
* (Oy Nokia Ab Robotics, creada el març de 1983, amb seu a
Hèlsinki)
22 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.3 ORGANITZACIONS SOBRE ROBÒTICA INDUSTRIAL
CIR (Contacgroep Industriele Robots, amb seu a Ijmuiden, Holanda)
BIRA (Belgian Instituut voor Regeltechniek en automatizering VZW,
creada el 1980, amb seu a Antwerpen, Bèlgica)
* (Australian Robot Association Inc., creada el 1981, amb seu a
Sidney)
MHI (Fachgemeinschaft Montagetechnik Hanbdhabungstechnik und
Industrie Robot (MHI), VDMA, creada l'octubre de 1981, amb
seu a Frankfurt, Alemanya)
DIRA (Dansk Robot Forening, creada el febrer de 1982, amb seu a
Århus, Dinamarca)
SIAA (Singapore Industrial Automation Association, creada el juny
de 1982, amb seu a Singapur)
* (China Society of Industrial Automation & Automated Indus-
tries, amb seu a Taipei, Taiwan)
* (Schreizrische Gesellschft für Automatik, Arbeitsgruppe
Robotik, Berna, Suïssa)
MNTK ("Robot" Interindustry Research and Production Association,
amb seu a Moscou, Rússia)
En els darrers anys s'ha sentit la necessitat de consolidar una organització
internacional que coordini les accions sobre robòtica en l'àmbit mundial,
iniciativa que ha donat per resultat:
IFR (International Federation of Robotics, creada el gener de 1987, amb
seu a Estocolm, Suècia). A partir de l'any 1988, la IFR compila, a
partir de les seves organitzacions nacionals, una estadística sobre
robots industrials en els principals països del món. La IFR també s'ha
responsabilitzat de la coordinació dels International Symposium of
Industrial Robotics (ISIR) i de les International Conference on
Advanced Robotics (ICAR).
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 23
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.3 ORGANITZACIONS SOBRE ROBÒTICA INDUSTRIAL
Trobades tècniques i científiques
En el desenvolupament de la robòtica industrial hi han pres una part molt activa les
universitats i els centres de recerca, tal com ja s'ha posat de manifest a l'enumeració
de les dates històriques significatives (Volum I, Sec. 1.4).
En aquest sentit, la trobada internacional sobre robòtica industrial de més
significació és:
ISIR (International Symposium of Industrial Robotics). Orientat vers l'intercanvi
d'informació tecnològica i sobre recerca. El primer simposi va tenir lloc a
Chicago el 1970 i el darrer (el 23è ISIR) ha tingut lloc a Barcelona l'any
1992. La seva periodicitat és anual i la seu és itinerant. S'ha procurat
alternar EUA, Europa i Japó:
1r Abril 1970 Chicago EUA
2n Maig 1972 Chicago EUA
3r Maig 1973 Zuric Suïssa
4t Novembre 1974 Tòquio Japó
5è Setembre 1975 Chicago EUA
6è Març 1976 Nottingham Regne Unit
7 Octubre 1977 Tòquio Japó
8è Maig 1978 Stuttgart RFA
9è Març 1979 Washington EUA
10è Març 1980 Milà Itàlia
11è Octubre 1981 Tòquio Japó
12è Juny 1982 París França
13è Abril 1983 Chicago EUA
14è Octubre 1984 Göteborg Suècia
15è Setembre 1985 Tòquio Japó
16è Set/oct 1986 Brussel·les Bèlgica
17è Abril 1987 Chicago EUA
18è Abril 1988 Lausana Suïssa
19è Novembre 1988 Sidney Austràlia
20è Octubre 1989 Tòquio Japó
21è Octubre 1990 Copenhaguen Dinamarca
22è Octubre 1991 Detroit EUA
23è Set/oct 1992 Barcelona Espanya
24 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.3 ORGANITZACIONS SOBRE ROBÒTICA INDUSTRIAL
Els 23 simposis celebrats fins l'any 1992 han originat una documentació,
mitjançant les seves actes, de primera magnitud sobre la robòtica industrial.
ICAR (International Conference on Advanced Robotics). Orientat vers la
cooperació internacional en la recerca sobre tecnologies avançades
de robòtica). El projecte de conferència, acor-dat el juny de 1982 a
Versalles per set països industrialitzats, va ser organitzat per primer
cop pel Japó el 1983.
1r Setembre 1983 Tòquio Japó
2n Setembre 1985 Tòquio Japó
3r Octubre 1987 Versalles França
4t Juny 1989 Columbus EUA
5è Juny 1991 Pisa Itàlia
L'interès creixent que ha despertat la robòtica industrial a diferents països
desenvolupats ha fet que proliferessin els simposis, les conferències i els
congressos d'àmbit nacional i internacional.
A Espanya l'Asociación Española de Robótica organitza:
* Congreso de la Asociación Española de Robótica, amb periodicitat
biennal, que s'ha celebrat, ja, dues vegades:
1r Novembre 1989 Saragossa
2n Novembre 1991 Saragossa
Quant a la documentació i la informació sobre robòtica industrial, atès el caràcter
multidisciplinari d'aquesta tecnologia, es troba molt repartida i difosa en multitud
de publicacions de diferents camps de la ciència i de la tècnica, tot i que existeixen
determinades revistes especialitzades.
Normativa
La fixació d'una normativa ha estat una de les preocupacions principals dels
fabricants i usuaris de la robòtica. Des de la terminologia, passant per la definició
de les prestacions, fins a la determinació dels mètodes d'assaig, han estat objecte
dels grups de treball ISO/TC 184/SC.
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 25
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.3 ORGANITZACIONS SOBRE ROBÒTICA INDUSTRIAL
ISO/TC 184/SC 1
Control
numèric
de màquines
Secr.: RFA
ISO/TC 184 ISO/TC 184/SC 2 TC 184/SC 2/GT 1
Sistemes Robots per a Terminologia
d'automatització l'entorn de i representació
industrial fabricació gràfica
Secr.: França Secr.: Suècia Secr.: França
ISO/TC 184/SC 4 TC 184/SC 2/GT 2
Represent. externa Prestacions i
de dades de definició mètodes
de productes d'assaig
Secr.: EUA Secr.: Suècia
ISO/TC 184/SC 5 TC 184/SC 2/GT 3
Integració en
sistemes i Seguretat
comunicacions
Secr.: EUA Secr.: Japó
TC 184/SC 2/GT 4
Llenguatges
de programació
de robots
de màquines
Secr.: RFA
TC 184/SC 2/GT 5
Interfícies
mecàniques
Secr.: RFA
TC 184/SC 2/GT 6
Sistema de missat-
geria específica
per a robots
Secr.: EUA
26 C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992)
© Els autors, 1998; © Edicions UPC, 1998.
4 ELS ROBOTS A LA INDÚSTRIA 4.3 ORGANITZACIONS SOBRE ROBÒTICA INDUSTRIAL
Les normes ISO sobre robots industrials són les següents:
ISO/TR 8373 - 1988 Robots manipulateurs industriels - Vocabulaire.
(Arran de la publicació d'aquesta norma, l'Asociación
Española de Robótica va promoure la fixació en les
llengües castellana i catalana dels termes continguts a la
norma).
ISO 9401-1 : 1988 Robots manipulateurs industriels - Interfaces mécaniques.
Partie 1: Interfaces circulaire.
ISO 9283 : 1990 Robots manipulateurs industriels - Critères de
performance et méthodes d'essai correspondants.
ISO 9787 : 1990 Robots manipulateurs industriels - Système de coordon-
nées et mouvement.
ISO 9946 : 1991 Robots manipulateurs industriels - Présentation des
caractéristiques.
C. RIBA i ROMEVA, Els robots industrials (II). Aplicacions (Tem-UPC, 1992) 27
© Els autors, 1998; © Edicions UPC, 1998.
You might also like
- Dataaaa Baruuu 1Document2 pagesDataaaa Baruuu 1Toyib AbdullahNo ratings yet
- Pràctica 4Document2 pagesPràctica 4Albert EstebanNo ratings yet
- Investasi Asing 10-12Document1 pageInvestasi Asing 10-12Septiawan RohimNo ratings yet
- Media Moda para MBDDocument6 pagesMedia Moda para MBDYESSENIA YSABEL INFANTE CARRASCONo ratings yet
- Mte Linha Agricola VT 1123Document11 pagesMte Linha Agricola VT 1123dougmec.pNo ratings yet
- Exercici 1Document3 pagesExercici 1Hugo Cañete SanchizNo ratings yet
- H1E022033 - Lapsem Modul 4Document46 pagesH1E022033 - Lapsem Modul 4haidar.zumaraNo ratings yet
- Ajustes Caudales Máximos El PaloDocument14 pagesAjustes Caudales Máximos El PaloThomas OchoaNo ratings yet
- DirOp Examen Ejemplo 3Document3 pagesDirOp Examen Ejemplo 3Manuel MoralesNo ratings yet
- Dimensionamento de GásDocument3 pagesDimensionamento de GásRaphael LMNo ratings yet
- Pricelist uPVC April 090421Document1 pagePricelist uPVC April 090421ihsan muhammadNo ratings yet
- Pesos BarraDocument1 pagePesos BarraluuiissNo ratings yet
- Nivelacion TopografiaDocument7 pagesNivelacion TopografiaNelson GutiérrezNo ratings yet
- Utp DeformacionesDocument7 pagesUtp DeformacionesoscataficNo ratings yet
- KapasitasDocument11 pagesKapasitasAndrianes TeguhNo ratings yet
- Dimensionamento de GásDocument3 pagesDimensionamento de GásRaphael LMNo ratings yet
- Resolem MultiplicacionsDocument4 pagesResolem MultiplicacionsOleguerNo ratings yet
- Daily BelajarDocument499 pagesDaily BelajarFebrian HidayatNo ratings yet
- Cotización de Monedas ExtranjerasDocument1 pageCotización de Monedas ExtranjerasAndreaNo ratings yet
- New Microsoft Excel WorksheetDocument18 pagesNew Microsoft Excel WorksheetDorin GrosuNo ratings yet
- Practica 3 Ejercicio 2Document8 pagesPractica 3 Ejercicio 2ana gonzalezNo ratings yet
- Data Praktikum Hidrolika Parshall Flume + GrafikDocument15 pagesData Praktikum Hidrolika Parshall Flume + Grafikawaburrahman79 awaburrahman79No ratings yet
- Teo1 Bloc1 2022-2023Document34 pagesTeo1 Bloc1 2022-2023YoNo ratings yet
- PuntoequilibrioDocument4 pagesPuntoequilibrioEva CuencaNo ratings yet
- 5 BondekDocument1 page5 BondekEdi SantosoNo ratings yet
- Parte Hugo TopografiaDocument3 pagesParte Hugo TopografiaHugo Ali Vasquez JulonNo ratings yet
- PPFD y LuxDocument2 pagesPPFD y LuxMartin Leonardo Arias PazNo ratings yet
- Portofoli Tema 7-8Document11 pagesPortofoli Tema 7-8Jorge Juan MartínezNo ratings yet
- COSTOS AgregadoDocument5 pagesCOSTOS AgregadoLisbeth xiomara Alarcon cahuasNo ratings yet
- CapacidadesDocument4 pagesCapacidadesRaul MartinNo ratings yet
- Tablas Calibradas Tanque N 1 Planta Caracas SVCSDocument5 pagesTablas Calibradas Tanque N 1 Planta Caracas SVCSRamon BarretoNo ratings yet
- Moonbot Deposito Obligasi / Bonds: Bullrun Ke Tahun KeDocument1 pageMoonbot Deposito Obligasi / Bonds: Bullrun Ke Tahun Kestevanusriko770No ratings yet
- حساب مخطط الترابطDocument5 pagesحساب مخطط الترابطHsaam HsaamNo ratings yet
- Repaso Ing. EconomicaDocument7 pagesRepaso Ing. EconomicaSarfraz ShethNo ratings yet
- 15 Q 099075Document2 pages15 Q 099075mariafernannddaNo ratings yet
- R-12 Sistema - Ingles PDFDocument4 pagesR-12 Sistema - Ingles PDFROBERTONo ratings yet
- Hasil Uji SondirDocument6 pagesHasil Uji SondirKelvin ColineNo ratings yet
- SSTEDocument14 pagesSSTEEfraín GonzálezNo ratings yet
- Color CartDocument8 pagesColor CartSonyaNo ratings yet
- ProyectoDocument3 pagesProyectoSara RodriguezNo ratings yet
- STGO EERR v2Document5 pagesSTGO EERR v2figueroacasas.hernanNo ratings yet
- Present and Future Value Tables CurrentDocument2 pagesPresent and Future Value Tables CurrentMultiverse EnergyNo ratings yet
- Cálculo Hidráulico - Red de AlcantarilladoDocument12 pagesCálculo Hidráulico - Red de Alcantarilladokevin randy diaz espinozaNo ratings yet
- Maspipon PVC 29.8.2022Document2 pagesMaspipon PVC 29.8.2022El DrogoNo ratings yet
- Perfil LongDocument2 pagesPerfil LongJEFERSON DOMINGUEZ CULQUINo ratings yet
- Curvas Peso-Potencia Vs Carga AlarDocument6 pagesCurvas Peso-Potencia Vs Carga AlarALBERTONo ratings yet
- Proyecciones Oficiales - 124237 - 104125Document12 pagesProyecciones Oficiales - 124237 - 104125Hernan Yucra GeronimoNo ratings yet
- Excel Nivelacion TopografiaDocument416 pagesExcel Nivelacion Topografiacarlos FernándezNo ratings yet
- Potência No Motor Dos TratoresDocument6 pagesPotência No Motor Dos TratoresSaulo AlvesNo ratings yet
- Price List Petroasia Otomotive - Jateng - Jatim - Bali - Lombok 09 November 2022Document5 pagesPrice List Petroasia Otomotive - Jateng - Jatim - Bali - Lombok 09 November 2022edam_73No ratings yet
- LTHN 01-10-2020Document2 pagesLTHN 01-10-2020Elius GunawanNo ratings yet
- CO COCU INGED L 01 K0004 1 Layout1Document1 pageCO COCU INGED L 01 K0004 1 Layout1julian andres villanNo ratings yet
- AvanceDocument63 pagesAvanceJOSEFINA MOENNENo ratings yet
- Chain CatalogueDocument4 pagesChain Cataloguejeremytoh89No ratings yet
- Formato Plantilla Margen GLP-G GLP 2023 PRDocument85 pagesFormato Plantilla Margen GLP-G GLP 2023 PRpinsaquiNo ratings yet
- Trabajo HidrologiaDocument2 pagesTrabajo HidrologiaJhon James Triana MirandaNo ratings yet
- Practica Conformado - Esfuerzo-DeformaciónDocument4 pagesPractica Conformado - Esfuerzo-DeformaciónYererllin VefiNo ratings yet
- Punto de Equilibrio 123Document13 pagesPunto de Equilibrio 123rodrigoNo ratings yet