You might also like
- 1253-Article Text-2936-1-10-20230907Document12 pages1253-Article Text-2936-1-10-20230907ephremNo ratings yet
- Sy Btech Computer Sem III Odd Jan - 2023Document75 pagesSy Btech Computer Sem III Odd Jan - 2023Ajinkya GhugeNo ratings yet
- Ant Colony Optimization Algorithm Solution For Critical Depth in Circular and Parabolic Open ChannelsDocument7 pagesAnt Colony Optimization Algorithm Solution For Critical Depth in Circular and Parabolic Open ChannelsFoolad GharbNo ratings yet
- Stress Concentration Factor Measurement of Tensile Plate With Circular and Elliptical Hole by Digital Hybrid Photoelastic ExperimentDocument4 pagesStress Concentration Factor Measurement of Tensile Plate With Circular and Elliptical Hole by Digital Hybrid Photoelastic ExperimentYasser BahaaNo ratings yet
- A Class of Polynomial Spline Curve With FreeDocument5 pagesA Class of Polynomial Spline Curve With FreeSyed Sdik Siddique Roll twenty four Batch eighteenNo ratings yet
- NigamJennings CalResponseSpectra1969 PDFDocument14 pagesNigamJennings CalResponseSpectra1969 PDFCristianMolinaOreNo ratings yet
- Quartic Trigonometric Bezier Curves and Shape PresDocument11 pagesQuartic Trigonometric Bezier Curves and Shape PresBí ấn NgườiNo ratings yet
- Numerical Methods Paper - 2016Document7 pagesNumerical Methods Paper - 2016Sourav PandaNo ratings yet
- Aits 2223 CRT III JeemDocument18 pagesAits 2223 CRT III JeemSuvrajyoti TaraphdarNo ratings yet
- A Proof For A QuickHull AlgorithmDocument21 pagesA Proof For A QuickHull AlgorithmRahul MehtaNo ratings yet
- Error AnalysisDocument17 pagesError AnalysisSantosh Kumar KuanarNo ratings yet
- Robotics Take Home Exam DetailsDocument9 pagesRobotics Take Home Exam DetailsJamesNo ratings yet
- Direct Torque Control Scheme For Dual-Three-Phase Induction MotorDocument8 pagesDirect Torque Control Scheme For Dual-Three-Phase Induction Motorcoyote533No ratings yet
- Honours Econometrics Tutorial 7: Specification and Data IssuesDocument6 pagesHonours Econometrics Tutorial 7: Specification and Data IssuesSwazzy12No ratings yet
- Fuzzy Control Adaptive of A Matrix Converter For Harmonic Compensation Caused by Nonlinear LoadsDocument9 pagesFuzzy Control Adaptive of A Matrix Converter For Harmonic Compensation Caused by Nonlinear LoadsPrasad SolasaNo ratings yet
- Performance Research On Turbo TCM Schemes Using Differe - 2005 - Chinese JournalDocument6 pagesPerformance Research On Turbo TCM Schemes Using Differe - 2005 - Chinese JournalpachterNo ratings yet
- ME - 2017 Set I Key Solution11Document25 pagesME - 2017 Set I Key Solution11UTKARSH SHARMANo ratings yet
- Fiitjee: Solutions To JEE (Main) - 2021Document41 pagesFiitjee: Solutions To JEE (Main) - 2021ik62299No ratings yet
- Efficient Computation of The Generalized Inertial Tensor of Robots by Using The Gibbs-Appell EquationsDocument10 pagesEfficient Computation of The Generalized Inertial Tensor of Robots by Using The Gibbs-Appell EquationsMartino Ojwok AjangnayNo ratings yet
- 10) There Are 4 Lines: A) 4y+5x 3 B) 3y+3x 7 C) y 7x+2 D) 5y 4x+9Document2 pages10) There Are 4 Lines: A) 4y+5x 3 B) 3y+3x 7 C) y 7x+2 D) 5y 4x+9Rohit TirkeyNo ratings yet
- Hankel Singular Values of Flexible StructuresDocument26 pagesHankel Singular Values of Flexible StructuresFrancisco HurtadoNo ratings yet
- HT TP: //qpa Pe R.W But .Ac .In: 2009 Circuit Theory & NetworksDocument8 pagesHT TP: //qpa Pe R.W But .Ac .In: 2009 Circuit Theory & NetworksAnimesh KarmakarNo ratings yet
- I, + Vi' Vi, Aki ': Bik Bik Vi Vk. Vi Vi VK, VK Vi VB Bik' VK VB D G G B, DDocument5 pagesI, + Vi' Vi, Aki ': Bik Bik Vi Vk. Vi Vi VK, VK Vi VB Bik' VK VB D G G B, DDhittaNo ratings yet
- Numerical Analysis CableDocument13 pagesNumerical Analysis Cablebul tusanNo ratings yet
- Aits 2223 CRT Iii JeemDocument18 pagesAits 2223 CRT Iii JeemPabbesetti JyotishNo ratings yet
- Motion Physics ExcelDocument64 pagesMotion Physics ExcelAshok PradhanNo ratings yet
- SCORE300 - Phase II Test Series 2024 - T03 (Code A) - QuestionDocument13 pagesSCORE300 - Phase II Test Series 2024 - T03 (Code A) - Questionudhav malpaniNo ratings yet
- Exam Material1Document81 pagesExam Material1zoya attiqueNo ratings yet
- Estimating - CostingDocument27 pagesEstimating - Costingmark bingNo ratings yet
- Network Analysis and Synthesis: M-57585 Page 1 of 3Document3 pagesNetwork Analysis and Synthesis: M-57585 Page 1 of 3Anonymous p36mltsXpNo ratings yet
- Comparing Offset Curve Approximation MethodsDocument11 pagesComparing Offset Curve Approximation MethodsRommel De Guzman MapoyNo ratings yet
- Fast sine-wave fitting algorithmDocument5 pagesFast sine-wave fitting algorithmAbdallah AmroNo ratings yet
- 7 Zellma Zaleska FornalDocument7 pages7 Zellma Zaleska Fornalmarkoperic2014No ratings yet
- Bfo Motor PDFDocument9 pagesBfo Motor PDFNaima RahouaNo ratings yet
- System Identification of An Induction MotorDocument4 pagesSystem Identification of An Induction MotorMHBNo ratings yet
- Scriptaingenia Art21Document7 pagesScriptaingenia Art21Olivier GouveiaNo ratings yet
- Review Practice Test-Sankalp022 PCM - 31-03-2021-MainsDocument13 pagesReview Practice Test-Sankalp022 PCM - 31-03-2021-MainsUnfortunate GamerNo ratings yet
- Interpolating Solid Orientations With A - Continuous B-Spline Quaternion CurveDocument10 pagesInterpolating Solid Orientations With A - Continuous B-Spline Quaternion CurveAjibola FolaranmiNo ratings yet
- Effects of Expanding Zone Parameters of Vacuum Dust Suction Mouth On Flow Simulation ResultsDocument6 pagesEffects of Expanding Zone Parameters of Vacuum Dust Suction Mouth On Flow Simulation ResultsMHK ZarkNo ratings yet
- Numerical Simulation of Tornado Flows Using Anisotropic Mesh AdaptationDocument7 pagesNumerical Simulation of Tornado Flows Using Anisotropic Mesh AdaptationAguirreMANo ratings yet
- Fiitjee: Solutions To JEE (Main) - 2021Document45 pagesFiitjee: Solutions To JEE (Main) - 2021ik62299No ratings yet
- 2013 MywbutDocument7 pages2013 MywbutagniNo ratings yet
- Performance of Three Turbulence ModDocument12 pagesPerformance of Three Turbulence Modkanbur.191No ratings yet
- Robotic Palm Kinematics and DynamicsDocument6 pagesRobotic Palm Kinematics and DynamicsimtiyazNo ratings yet
- Study of The Effect of The Automotive Wiring Harnesses On The Far-Field Radiation PatternsDocument14 pagesStudy of The Effect of The Automotive Wiring Harnesses On The Far-Field Radiation Patternsolac17No ratings yet
- Control System 1Document31 pagesControl System 1Rakibul Hasan RakibNo ratings yet
- MCS-013 Solved Assignment 2023-24_protected-1Document32 pagesMCS-013 Solved Assignment 2023-24_protected-1RohitNo ratings yet
- 18.09.22 SR - Star Co-Sc (Model-B) Jee Main Ptm-1 QPDocument18 pages18.09.22 SR - Star Co-Sc (Model-B) Jee Main Ptm-1 QPDeeip DNo ratings yet
- Toroidal Ferrite Core TutorialsDocument12 pagesToroidal Ferrite Core TutorialsSoumitra PaulNo ratings yet
- Placement Preparation: Jobs Career & Courses P3 Free TrialDocument15 pagesPlacement Preparation: Jobs Career & Courses P3 Free TrialEr Biswajit BiswasNo ratings yet
- 19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraDocument49 pages19EE5803 UNIT-4 Path Planning: Prepared by S.ChithraTizon Star100% (1)
- 7 Jeem 2023 Jan 30 First Shift PaperDocument41 pages7 Jeem 2023 Jan 30 First Shift PaperAmogh R.GowdaNo ratings yet
- AMC 10 Geometry Chapter 3 SummaryDocument24 pagesAMC 10 Geometry Chapter 3 SummaryXuemei zhangNo ratings yet
- Chapter 3: Kinematic Position Analysis: 3.1 Review of Similar Geometric ArchitecturesDocument10 pagesChapter 3: Kinematic Position Analysis: 3.1 Review of Similar Geometric Architecturespouya agabeygiNo ratings yet
- FEEG1001 Applied ComputingDocument34 pagesFEEG1001 Applied Computingjulinc1234No ratings yet
- Printed (Following Roll To Filled in Your: Paper and NoDocument6 pagesPrinted (Following Roll To Filled in Your: Paper and NoRahul GandhiNo ratings yet
- Test En2 Website ExampleDocument5 pagesTest En2 Website Exampleahmad khanNo ratings yet
- PHP F Ku ArrDocument37 pagesPHP F Ku ArrKshitij Shende.No ratings yet
- P 7 X FDDda B3 GD8 TH RNF PiDocument17 pagesP 7 X FDDda B3 GD8 TH RNF PiGingka HaganeNo ratings yet
- Curve and Surface Fitting Models Based On The Diagonalizable Differential SystemsDocument26 pagesCurve and Surface Fitting Models Based On The Diagonalizable Differential SystemsLayla VuNo ratings yet
- An Optimisation of A Freeform Lens Design For LED Street LightingDocument4 pagesAn Optimisation of A Freeform Lens Design For LED Street LightingLayla VuNo ratings yet
- Curve and Surface Construction Using Variable Degree Polynomial SplinesDocument28 pagesCurve and Surface Construction Using Variable Degree Polynomial SplinesLayla VuNo ratings yet
- Assessing Program Learning Outcomes with Capstone RubricsDocument10 pagesAssessing Program Learning Outcomes with Capstone RubricsLayla VuNo ratings yet
- Approximating Quadratic NURBS Curves by Arc SplinesDocument6 pagesApproximating Quadratic NURBS Curves by Arc SplinesLayla VuNo ratings yet
- Specific Generic Performance Indicators and Their Rubrics For The Comprehensive Measurement of Abet Student OutcomesDocument21 pagesSpecific Generic Performance Indicators and Their Rubrics For The Comprehensive Measurement of Abet Student OutcomesLayla VuNo ratings yet
- Adas 2223 k6 Tiếng Anh Tháng 9Document1 pageAdas 2223 k6 Tiếng Anh Tháng 9Layla VuNo ratings yet
- Robot-Cong-Nghiep - Lecture8 - (Cuuduongthancong - Com)Document2 pagesRobot-Cong-Nghiep - Lecture8 - (Cuuduongthancong - Com)Layla VuNo ratings yet
- Nonlinear Adaptive Flight Control Law Design and Handling Qualities EvaluationDocument6 pagesNonlinear Adaptive Flight Control Law Design and Handling Qualities EvaluationAnirudh IndanaNo ratings yet
- Nice Hand Book - Numerical Analysis PDFDocument472 pagesNice Hand Book - Numerical Analysis PDFapi-3866509100% (14)
- Computer Graphics and Multimedia Systems Chapter AnalysisDocument20 pagesComputer Graphics and Multimedia Systems Chapter Analysistabishkhan12345No ratings yet
- Package Splines2': September 19, 2021Document25 pagesPackage Splines2': September 19, 2021NeilFaverNo ratings yet
- Croquizador FreeCAD InglesDocument87 pagesCroquizador FreeCAD InglesJRNo ratings yet
- GrasshopperDocument4 pagesGrasshopperKeyur MistryNo ratings yet
- MCA III Complied 23.06.16Document243 pagesMCA III Complied 23.06.16Shahriar AhmedNo ratings yet
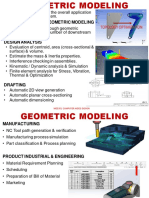
- Geometric Modeling Applications in CAD, CAM and CAEDocument44 pagesGeometric Modeling Applications in CAD, CAM and CAEBaahuNo ratings yet
- Modeler Manual Maxsurf 2015Document276 pagesModeler Manual Maxsurf 2015SirBlack50% (2)
- Gujarat Technological University Mechanical (Cad/Cam) (08) / Mechanical (Machine DESIGN)Document3 pagesGujarat Technological University Mechanical (Cad/Cam) (08) / Mechanical (Machine DESIGN)ganeshNo ratings yet
- Computer Graphics Lab VivaDocument4 pagesComputer Graphics Lab VivaajmalNo ratings yet
- Mathematical Representation of Curves: Oneil Josephs Lecturer School of EngineeringDocument33 pagesMathematical Representation of Curves: Oneil Josephs Lecturer School of EngineeringJohn SmithNo ratings yet
- EEG StressDocument16 pagesEEG StressRavi ChanderNo ratings yet
- Gujarat Technological University: Computer Aided Design SUBJECT CODE: 3710802Document3 pagesGujarat Technological University: Computer Aided Design SUBJECT CODE: 3710802Bamania ChiragNo ratings yet
- Design of Bezier and Ourbs Horns and Their ApplicationsDocument98 pagesDesign of Bezier and Ourbs Horns and Their ApplicationsZiad Al SarrafNo ratings yet
- Model Design of Blade PDFDocument14 pagesModel Design of Blade PDFHibran Sabila Maksum100% (1)
- Advanced CAD-SurfacesDocument186 pagesAdvanced CAD-SurfacesBarış ÇayNo ratings yet
- Moratuwa CAD & Manufacturing ModuleDocument1 pageMoratuwa CAD & Manufacturing ModuleKasun WeerasekaraNo ratings yet
- Manufacturing Technology (ME461) Lecture15Document20 pagesManufacturing Technology (ME461) Lecture15Jayant Raj SauravNo ratings yet
- Journal of Computational and Applied Mathematics: Tian-Xiao HeDocument11 pagesJournal of Computational and Applied Mathematics: Tian-Xiao HefiliatraNo ratings yet
- CATIA V5 Questions & AnswersDocument70 pagesCATIA V5 Questions & AnswersVijay RameshNo ratings yet
- AutoCAD Interview Questions and Answers 53Document15 pagesAutoCAD Interview Questions and Answers 53kanika maheshwariNo ratings yet
- B-spline and NURBS Curves ExplainedDocument94 pagesB-spline and NURBS Curves ExplainedMoustafa MahmoudNo ratings yet
- CagdDocument9 pagesCagdjazzy075No ratings yet
- Quintic B-Spline Method For Numerical Solution of Fourth Order Singular Perturbation Boundary Value ProblemsDocument11 pagesQuintic B-Spline Method For Numerical Solution of Fourth Order Singular Perturbation Boundary Value ProblemsBekele BadadaNo ratings yet
- M4 5 Synthetic Surface NURBS Scuptured SurfacesDocument17 pagesM4 5 Synthetic Surface NURBS Scuptured SurfacesNANDULA GOUTHAM SAINo ratings yet
- Geomcs v2 PDFDocument502 pagesGeomcs v2 PDFabhisheks5987No ratings yet
- Unit Iii Three-Dimensional: Cs 8092 Computer Graphics Iii Yr Vi Sem 2017 RegulationDocument40 pagesUnit Iii Three-Dimensional: Cs 8092 Computer Graphics Iii Yr Vi Sem 2017 Regulationsathyaaaaa1No ratings yet
- Reverse Engineering and Its Application in Rapid Prototyping and Computer Integrated ManufacturingDocument8 pagesReverse Engineering and Its Application in Rapid Prototyping and Computer Integrated ManufacturingRomdhane Ben KhalifaNo ratings yet
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- SketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyFrom EverandSketchUp Success for Woodworkers: Four Simple Rules to Create 3D Drawings Quickly and AccuratelyRating: 1.5 out of 5 stars1.5/5 (2)
- FreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsFrom EverandFreeCAD | Step by Step: Learn how to easily create 3D objects, assemblies, and technical drawingsRating: 5 out of 5 stars5/5 (1)
- Beginning AutoCAD® 2020 Exercise WorkbookFrom EverandBeginning AutoCAD® 2020 Exercise WorkbookRating: 2.5 out of 5 stars2.5/5 (3)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Certified Solidworks Professional Advanced Surface Modeling Exam PreparationFrom EverandCertified Solidworks Professional Advanced Surface Modeling Exam PreparationRating: 5 out of 5 stars5/5 (1)
- From Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsFrom EverandFrom Vision to Version - Step by step guide for crafting and aligning your product vision, strategy and roadmap: Strategy Framework for Digital Product Management RockstarsNo ratings yet
- Autodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersFrom EverandAutodesk Inventor 2020: A Power Guide for Beginners and Intermediate UsersNo ratings yet
- FreeCAD | Design Projects: Design advanced CAD models step by stepFrom EverandFreeCAD | Design Projects: Design advanced CAD models step by stepRating: 5 out of 5 stars5/5 (1)
- Contactless Vital Signs MonitoringFrom EverandContactless Vital Signs MonitoringWenjin WangNo ratings yet
- Design Research Through Practice: From the Lab, Field, and ShowroomFrom EverandDesign Research Through Practice: From the Lab, Field, and ShowroomRating: 3 out of 5 stars3/5 (7)
- Autodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersFrom EverandAutodesk Inventor | Step by Step: CAD Design and FEM Simulation with Autodesk Inventor for BeginnersNo ratings yet