Professional Documents
Culture Documents
AN/APG-66 Radar Medium PRF Mode
Uploaded by
Đinh Ngọc Việt TùngOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
AN/APG-66 Radar Medium PRF Mode
Uploaded by
Đinh Ngọc Việt TùngCopyright:
Available Formats
Medium PRF for the AN/APG-66 Radar
This paper discusses themedium pulse repetition frequency producedby Westinghouse but separateassembliesare
(PRF) pulse doppler mode of the A N / A P C 6 6 , the multimode fire beingbuiltby companies in Belgium, The Netherlands,
control radar for the F16A/B aircraft. Thisradaris currently in
Denmark, and Norway.
production and as of January 1984 over 1700 have been delivered.
Included is a discussion of the three PRF types: high, low,and This paper focuses on themedium pulse repetition
medium PRF, leading to the conclusion that for an airborne, look- frequency (PRF) downlook modeofthe AN/APG-66. A
down application the medium PRF waveform is the best choice. briefdescriptionof all the radar modes is followed by a
System tradeoffs between a high peak power and alow peak power discussion of some of the design considerations and trade-
transmitter are discussed which show that when only a medium
PRF waveform is required, the high peak power transmitter yields
offs leading to the present medium PRF design. Included is
better performance. Some system design considerations concerning a discussion of the PRF types: high, low, and medium PRF;
the PRF selection and sidelobe clutter are also included. Finally, the high versus low transmitter peak power tradeoffs, and some
radar mechanization is presented. The A N / A P C 6 6 radar in general, PRF selection and sidelobe clutter considerations. Finally,
and its medium PRF mode in particular, have undergone extensive
the radar mechanization is discussed with a brief descrip-
operationalevaluation and the resultshave been excellent. The
radar has met or exceeded its performance design specifications tion of each line replaceable unit (LRU).
and the field reliability has been outstanding. For example, for the
year 1983 the MTBF was 102.9 h based on 64204 operating hours DESCRIPTION
MODE
from two operational air bases.
Briefly summarized, theten modes of operation now
INTRODUCTION programmed into the AN/APG-66 radar are as follows:
The AN/APG-66, an airborne, multimode fire control Air to Air
radar designed by the Westinghouse Defense and Electron-
ics Center in Baltimore, MD, is produced for the F-l6A/B Downlook-A coherent, medium PRF, pulse-doppler
multirolefighterbuilt by General Dynamics, Fort Worth mode used for detecting low-flying airborne targets in the
Division, Fort Worth, TX under the auspices of the United presence of main beam clutter.
States Air Force. The radar uses a modular design approach - Uplook-A coherent, low PRF mode used in the ab-
sence of clutter to detect airborne targets.
for reliability and maintainability considerations and is
unique in two regards. One, it is the first production fire - Air Combat-An automatic target acquisition mode
which permits rapid "hands-off" target acquisition.
control radar to be built using a design-to-cost philosophy
and two, it is the first production radar designed to opti- - Track-A submode, intowhich the radar is switched
from any of the above three search modes.
mizethemedium PRF waveform. The stagewasset for
development of the radar in 1971 when Westinghouse top
management sparked a high-priority effort to develop a line Air to Surface
of
fire
control radars that could be manufactured at
lower cost without sacrificing performance. Development Real Beam Map-A noncoherent, frequency-agile
of the Westinghouse family of radars, designated WX, re- mode for air-to-surface mapping; used to identifyand locate
ground targets and to update the inertial navigation system.
sulted in the technologyenablingthe company tobid
successfully forthe radar aboard the Air Combat Fighter - Doppler Beam Sharpening-A groundmapping mode
which employs doppler processing to enhance the azimuth
which General Dynamics developed into the present
F-l6A/B. The first production radar system was delivered to resolution beyond that of the real beam.
the Air Force in June 1978 and over 1700 radars have been Sea I-A noncoherent, frequency-agile mode used for
detecting ships in the presence of moderate sea clutter.
built as of January 1984. An unusual feature of the radar is
its multinational manufacture. Not only is the system being - Sea Il-A coherent, MTImode which permits detec-
tion of moving ships in the presence of strong sea clutter.
- Air-to-Ground Ranging-Obtains accuraterangedata
along theradar line of sight to a ground point via angle-error
Manuscript received April 25, 1984; revised June 2, 1984.
sensing.
The authors are with Westinghouse Electric Corporation, Defense
and Electronic Center, Baltimore, M D 21203, USA. - Beacon-A mode that can interrogate X-band beacons
001 8-921 .00 61985 IEEE
9/85/0200-030l$Ol
P R O C E E D I N G S O FTHE IEEE. VOL. 73. NO 2, FEBRUARY 1985 301
and receive transponder replies, including coded replies. do not fit into any of these very general classifications. For
Also permitsair-to-air applications such as tanker ren- example, some air-to-ground radar modes use PRFs which
dezvous. are unambiguous in both range and doppler but these will
be ignored for the present discussions.
Downlook Mode The paragraphs which follow delineate some of the ad-
vantages and disadvantages of each PRF type as applied to
Downlook is a coherent, medium PRF pulse doppler an airborne, lookdown radar. The reader is referred to [I] for
mode used for “looking down” into heavy clutter to detect further discussion of the PRF types.
small, low-flying, airborne targets. Slow-movingground Low PRF: The principal advantage of a low,PRFsystem
targets (< 55 knots) are eliminated from the display as well is theability to sort clutterfrom targets on the basis of
as large discrete targets appearing in the antenna sidelobes. range. For example, a rain clutter cell several miles in extent
This mode detects at all targetaspectsexcept a small wouldnot interfere with targets notdirectly in the cell
angular region about the broadside or beam aspect. There whereas in a medium or high PRF system this same rain cell
are eight PRFs per dwell so as to maintain at least three could clutter the entire unambiguous range interval.
PRFs visible at all required doppler frequencies and ranges. A second feature of a low PRF system is that no range
Adaptive target thresholding maintains a “clean scope” correlation process is required (since the range is unam-
presentation even in the presence of large clutter returns. biguous by definition) which, in turn, means no spurious
Mainbeam clutter is substantially reduced with a three- target problems. In an ambiguous ranging system, multiple
pulse time-domain canceler. The output is thendoppler targets can confuse the range correlator and generate spuri-
filtered using a 64-point Fast FourierTransform (FFT) al- ous targets, called ghosts.Since the ranges reported are
gorithm.Only those filters not within 55 knots of the unambiguous no ghosts are generated in a low PRF system.
mainbeam clutter are allowed to pass to the range correla- A third advantage of a low PRF mechanization is that an
tors. A cell-averaging CFAR is employed to computethe attenuationfunction can be applied to the receiver as a
detection thresholds and provide immunity to false alarms function of rangeor time, commonly called a sensitivity
arising from area sidelobe clutter. Sidelobe discretes pass timecontrol (STC), which cansuppress the near-range
throughthe CFAR but are rejected by a range correlator sidelobe clutter while not affecting the longer ranges. In an
where an amplitude test is performed prior to allowing a ambiguous range mechanization this STC function cannot
final range correlation to occur. Targets passing the correla- be used as it would attenuate long range targets of interest
tion criteria are sent to the radar computer for angle and as well as the near range clutter. The result is that a low PRF
range centroiding before being displayed. systemcan be more tolerant ofpoor antenna sidelobes
since they can be suppressed by the STC.
DESIGNCONSIDERATIONS O n the negative side, a low PRF system inherently suffers
from the lack ofdopplervisibility as illustrated in Fig. 2,
The AN/APG-66 is the first production fire-control radar
to usean optimized medium PRF waveform. By this it is which shows the baseband spectrum of a low PRF system.
meant that the PRF selection, high peak transmitted power, Here, the frequency ofthe mainbeam clutter along the
and short pulsewidth together were designed to maximize radar’s line of sight has been hetrodyned to zero frequency
target detection range performance in the presence of heavy for ease of mechanization so that the observed dopplers
ground clutter while at the same time maintaining a low from targets (or sidelobe clutter) are with respect to dc. In
false alarm rate. The following paragraphsdiscussseveral other words, the dopplers observed are as if the airborne
design tradeoffs and considerations pertaining to the radar were fixed inspace at zero velocity.
In an airborne search radar application the criterion which
AN/APG-66 medium PRF mode. Included is a discussion of
the waveform selection (PRF type), high versus low trans- determines the doppler rejection notch shown in Fig. 2 is
mitter peak power, PRF selection, and some sidelobe clutter primarily that for slow-moving groundtarget rejection rather
than mainbeam clutter rejection, since slow-moving target
considerations.
rejection requires a wider notch. Thereason is that in an
airborne downlook search application the verylarge num-
Waveform Selection
bers of ground moving targets visible to the radar confuse
One of the basic decisions which must bemade in a the radar operator and hinder the recognition of low-flying,
waveform selection is the PRF of the radar. Generally, radar airborne targets.
systems are classified into one of three PRF types: low, high, A typical rejection notch width is k55 knots with respect
and medium PRF. A low PRF system is defined as one in to thegroundwhich requires adopplernotch widthof
which the ranges of interest, targets, or clutter, are unam- +I870 Hz with respect to the center of mainbeam clutter
biguous while the velocities of interest are ambiguous. A frequency(for an X-band system). With this wide notch,
high PRF system hasan unambiguous doppler interval but the mainbeam clutterrejection is adequatemost of the
ambiguous ranges. A medium PRF system is ambiguous in time; an exception perhaps is when the radar is flying
both range and doppler regions of interest. Here, unam- supersonic at wide platform look angles.
biguous range means that the range to the target or clutter Assuming then that a doppler notch width of +I870 Hz
can be determined by simple timediscrimination on a is desired, 3740 Hz of the doppler spectrum between PRF
single PRF as opposed to a multiple PRF correlation process. lines would be blind to targets of interest. Since typical low
Similarly, unambiguous doppler refers to velocity de- PRFs range from IO00 to 4ooo Hz, depending on the maxi-
termination via simple frequency discrimination. Fig. l il- mum range of interest desired, essentially no usable dop-
lustrates these three PRF types in range and doppler space. pler spectrum i s left. Again, a system operating at X-band is
It is immediately obvious that there are PRF types which assumed.
302 PROCEEDINGS O F THE IEEE. VOL. 73, NO. 2, FEBRUARY 1985
RANGE DOPPLER
TARGET
TARGET
-4
-
TRUE RANGE TRUE VELOCITY
0
RANGE(TIME1
II
L-;2J
I
TRANSMIT PULSE
TARGET
0123456--
RANGE GATE NUMBER
I "
I
I
u
01234--
MEDIUM PRF
RANGE
n
GATE
12345---n
NUMBER
!
1
I
I
-- 23
HIGH PRF
RANGE GATE NUMBER DOPPLER BINS
IPP - INTERPULSE PERIOD
RANGEGATES. FREWENCY BINS
ILLULLU
Fig. 1. PRF types in range-dopplerspace.
REJECTION W L E R REJECTON
NOTCH PASSBAND NOTCH MAINBUM CLUTTER
I- , 4
I /
FREO = p m4 I
I
0
Fig. 2. Low PRF spectrum.
PRF
FREWENCY - I
ZIFUF -
-m,
Fig. 3.
o *
High PRF spectrum.
A
FREWENCY-
pR -2v,
A
PRF
In summary then, while a low PRF system provides accu- sight doppler plus the mainbeam clutter doppler along the
rate and ghost free range information, the visible doppler line of sight. Thus whenever the targets doppler along the
spectrum available after clutter and/or groundmoving line of sight is greater than the maximum sidelobe clutter
target rejection is generally too limited for airborne, look- doppler, the target is clear ofthe sidelobe clutter and
down applications. enjoys noise-limited detection performance.
High PRF: In ahigh PRF waveform targets whose dop- This condition occurs as a function of the ratio of the
plers appear clear of the sidelobe clutter can be detected in target's velocity to the radar's velocity and the antenna look
essentially a noise-limited environment as opposed to being angle, as shown in Fig. 4. For look angles directly along the
clutter-limited, even at low altitudes. This is illustrated in radar's velocity vector any target whose line-of-sight com-
Fig. 3 which shows the high PRF spectrum after downcon- ponent of velocity is toward the radar is clear of sidelobe
version from RF but before clutter tracking for clarity. clutter. At a 90" look angle, the target's velocity component
The sidelobe clutter spreads out +2V,/X around the PRF along the line of sight has to begreater than the radar's
lines where V, is the radar aircraft ground speed and X, the ground speed to become clear of sidelobe clutter.
RF wavelength. The mainbeam clutter frequency shown The sidelobe clear/clutter region canalsobeexpressed
changes according to the radar's look angle with respect to in terms of the aspect angle with respect to the target, as
thevelocity vector and is usually hetrodyned to zero shown in Fig. 5 . Here, a lead collision geometry is assumed
frequency for ease of mechanization. A closing target is also in which the radar and target aircraft fly straight-line paths
shown where the total doppler shift is the targets line-of- toward an intercept point; the look angle of the radar and +
LONG A N D H A R R I C E R : M E D I U M PRF FOR THE AN/APC-66 RADAR 303
VT . RADIAL COMPONENT OF TARGET VELOCITY TOWARDS THE RADAR moving targets can be eliminated since such a wide doppler
” R . RADAR AlRCRAFl GROUND SPEED spectrum i s available for targetprocessing. For example,
with a 150-kHz PRF, targets slower than, say, 80 knots with
respect to the ground can be easily rejected whereas with a
low PRF waveform this would be virtually impossible.
An additional advantage of a high PRF waveform is that
when target velocity information is all that is required, i.e.,
no target range, a 20- to 25-percent improvement in detec-
tion range can be realized for a given average power, over a
system requiring ranging. This is due to the ambiguous
range information inherent in a high PRF waveform which
typically requires either linear or sinusoidal frequency mod-
ulation of the RF carrier during the radar’s dwell time on
ANTENNA LOOK ANGLE ($tDEG
target to resolve the range. In any case, the requirement to
Fig. 4. Sidelobeclutter/clear regions versus look angle
resolve range is costly in terms of range performance. For
the AN/APG-66 downlook mode under discussion,target
the aspect angle of the target A are constant for a given set range information is required so that a velocity-only search
of radar and target speeds V, and V,, respectively. mode is not a viable option.
The center of the “pie diagram” is the target and the Perhaps the biggest single limitation of a high PRF wave-
angle with respect to the target along the circumference is form is its limited ability to detect targets which appear in
the aspect angle. The aspect angle and look angles vary as the sidelobe clutter region, especially at low radar altitudes.
VRsinq = V,sin A as defined by a lead collision course. As discussed earlier and shown in Figs. 4 and 5 the clutter-
The target aspect angle A is zero for a head-on, closing free detection region is in the forward aspect of the target,
condition and 180’ for tail chase.Theaspect angle corre- whereas in the rearaspects, the target is competing with
sponding to the sidelobe clear/clutter boundary is a func- large sidelobe clutter returns at low altitudes.
tion of the relative radar/target velocity ratio and is shown In a low PRF waveform, the nearrange sidelobe clutter
in Fig. 5 for four cases. Case 1 is where the radar and target can be suppressed with an STC attenuation function and
speeds are equal, and the targetcanbeseenclear of there is no range folding; whereas in a high PRF system the
sidelobe clutter in a head-on aspect out to 60’ either side sidelobe clutter all folds into a small ambiguous range
of the target’s velocity vector. Similarly, case 4 shows the intervaldue to the manyrange ambiguities. For example,
condition where the target’s speed is 0.4 times the radar’s with a PRF of 150 kHz the unambiguous range is only a half
speed in whichcase the target can be seen clearof sidelobe mile and since sidelobe clutter can be well above thermal
clutter over aregionofk78.5’ relative to the target’s noise out to a range of 10 nmi or so, 19 ambiguities of
velocity vector. Again, these conditions are for an assumed clutter will be folded into the PRF interval. Hence at low
lead collision course. As evident, the aspect angle of the altitudes, sidelobe clutter severlydegrades the radar’s de-
target clear of sidelobe clutter is always forward ofthe tection performance.
beam aspect. In summary, a high PRF waveform provides ghost-free
Another feature of a high PRF waveform is that slow- target doppler, the capability to reject slow-moving targets,
CASE I “T R’/
VR .RADAR AIRCRAW VELOCITY VECTOR
VT .TARGET VELOCITY VECTOR
LEAD COLLISION COURSE
8:
0.4
Fig. 5. Sidelobe clutter/clear regions versus target aspect angle.
304 P R O C E E D I N G S O F T H E IEEE. VOL. 7 3 , NO. 2 , FEBRUARY 1985
and a clutter free target detectionregion at sometarget mallythe antenna sidelobe level is not a constant over
aspects. However, thelimited all-target aspect detection spzce; hence, the sidelobe clutter does not gradually taper
capability, especially at low altitudes, precludes the use of a off from the altitude line but instead is a function of not
high PRF waveform for the AN/APG-66 downlook mode. only range but doppler frequency. A detailed discussion of
Medium PRF: In the previous discussion it was shown medium PRF clutter is beyond the scope of this paper and
that both the low and high PRF waveforms offer attractive the reader is referred to [3] and [4]. Suffice it tosay here that
advantages for an airborne downlook mode but also both sidelobe clutter clear regions can be found in range-dop-
havesevere limitations: the low PRF waveform cannot re- pler space and that the extent of theseclear regions is a
ject slow-moving targets and the high PRF waveform can- function of theantenna sidelobe levels, among other things.
notperforminthe tail aspect region of the target. The In the discussion of a high PRF waveform it was shown
following paragraphsdiscuss the medium PRF waveform that at some target aspectangles forward ofthe beam
which combines some of the attributes of both high and aspect the target is clear of sidelobe clutter in the frequency
low PRF such as slow-moving target rejection, all aspect domain. However, in a medium PRF waveform the target is
target coverage, sidelobe clutter free regions, and accurate always potentially competing with sidelobe clutter, at all
range information. aspect angles, due to the sidelobe clutter being ambiguous
In a medium PRF waveform, the doppler extent of side- in doppler. The fact that there are regions in range clear of
lobe clutter is generally ambiguous and the targets of inter- sidelobe clutter, as discussed in the previous paragraph, and
est are generally ambiguous in range and thus compete thatthesidelobeclutter varies with doppler frequency
with the near range sidelobe clutter. This would seem to be mitigates the above situation somewhat. Reasonably good
the worst of all worlds in that no velocity or range regions “all-aspect” performance can be achieved even at low
exist clear of sidelobe clutter. However, in actual practice altitudes.
and with careful design, clear regions can be established in For example, Fig. 7 shows the 85-percent cumulative
range-doppler space. probability of detection on a small airborne target versus
Fig. qa) shows an amplitude versusrange profileof the target aspect angle for the conditions shown. Again, the
sidelobe clutter for the case of an average sidelobe level 35 aspect angle is the angle between the line of sight to the
dB below the main lobe, a IO-kHz PRF, and a 6000-ft radar radar and the target’s velocity vector. The loss ofperfor-
altitude. The sidelobe clutter starts at the range of the radar mance at the beamaspect of the target is due to the
above the ground (the altitude line) and tapers off until at a mainbeam clutter rejection notch since a broadside target
range of 5 nmiit falls below the thermal noise level. A has no radial component of velocity toward the radar and
IO-kHz PRF has an unambiguous range of 8 nmi, hence the thus is at the same frequency as the mainbeam clutter after
sidelobe clutter region repeats in the unambiguous range clutter tracking. The wiggles in the performance curve are
interval as shown. For the example cited, there is a 3-nmi caused primarilyby the sidelobe clutter variations with
range interval between 5 and 8 mi which is free of sidelobe range and doppler and also by the PRF visibility to be
clutter and which alsorepeats in the unambiguous range discussed later. Thus even at the low altitude shown, 5000
interval. With a multiple PRF per dwell waveform, the ft, all aspects of the target are detectable (except for the
sidelobe clutter-free intervals smear around in range(ex- beam aspect of course).
cept for the first one) and provide a clutter free detection As discussed in an w e r section, slow-moving targets
capability. This is illustrated in Fig. qb). have to be reject&n order for the radar to be operation-
The foregoing discussion is oversimplified, in that nor- ally usable; otherwise, the slow movers hinder the radar
PRFl = lOKH2
RANGE -
I PRF3
A A
Fig. 6. Amplitude versus range of sidelobe clutter.
RANGE -
LONG AND HARRICER: MEDIUM
PRF FOR THE AN/APC& RADAR 305
RANGE. nml
fig. 7. Rangeperformance versus target aspectangle.
operator's abilityto detect airborne targets.The speeds reliably produced, and the signal processing is limited by
which get rejected, that is, the rejection notch width,weighs hardware and/or processing time constraints. Thus the re-
heavily in the PRF selection, a subject discussed in a later quired range performance dictates the average power nec-
section. For the moment suffice it tosay that a medium PRF essary.
waveform has sufficientdopplervisibilityfor adequate Giventhe average power required, either a low peak
ground moving target rejection. power,longpulsewidth or a high peak power, short
pulsewidth can beused. In either case, a short processed
HIGHPEAK POWER VERSUS
Low PEAK POWER pulsewidth is required in a medium PRF waveform to un-
ambiguously resolve range and also for target range resolu-
The following paragraphsdiscusssome of the tradeoffs tion requirements, so that pulse compression is required
between a high peak power and a low peak power trans- when long transmitted pulsewidths are employed.
mitter. For a medium PRF only waveform high peak power Both pulse compression and long transmitted pulse-
is clearly the best choice as will be shown. widths have deleterious effects on radar performance in a
The choicebetween a high peak poweror low peak medium PRF waveform and these are discussed below.
power transmitter i s most often determined by the wave- The most common means of pulse compression in today's
forms required in the radar. If both high PRF and medium medium PRF radars is phase coding, either binary or
or low PRF modes are required, thena low peak power quadraphase. The binary codes are the easiest to implement
transmitter is mandated since the high peak power trans- but suffer from being doppler sensitive and the difficulty in
mitter cannot operate at therequired duty cycles.'For achieving the required low time sidelobes.
example, a high PRF mode typically operates with a trans- The doppler sensitivity problem is very severe for even
mitter duty cycle2 of between 0.3 and 0.5 such that a high modest length codes; the problem being that the individual
peak power transmitter would have to operate at excessive bits of the received code are shifted in phase by the target
average power outputs. O n the other hand, a medium PRF doppler so that in the extreme the phase at the end of the
waveform operates typically with a duty cycle between 0.01 code is shifted by 180". At this doppler, often referred to as
and 0.03 so that either a high peak power transmitter or a the criticalvelocity, large time sidelobes and a reduced-
low peak power transmitter with pulse compression could amplitude mainlobe result. For a 13-bit code with I-ps bits,
be used. TheAPG-66radardoes not employ a high PRF at X-band, the critical velocity is 1215 knots. One means to
mode so that either type of transmitter could be used. help overcome this deficiency is to offset the code in
In a practical radar design the average transmitted power doppler so that atsay plus 600 knots no doppler degrada-
is determined by the range performance requiredofthe tion occurs. The problem, however, is that this only works if
radar since the other factors which enter into the range the expected doppler returns are within narrow bounds. If
performance are usually predetermined. For example, the both negative and positive dopplers (i.e., opening and clos-
antenna aperture is usually the largest which fits into the ing targets) are to be handled, as is usually the case, the
available space, the noise figure is the lowest which can be doppler offset exacerbates theproblem at the opposite
doppler sense.
The time sidelobe requirements on the compressed pulse
are typically 30 dBor so, and can be achieved with
'A recently developed transmitter can selectively operate in both processing losses usually under 1 dB; however, they de-
highand low peak power modes, however; only a single power grade whenthe received pulse becomes eclipsed. This
level is assumed for the present discussion.
2The transmitter dutycycle is defined as the PRF times the occurs when multiple targets are close together in range or
transmitted pulsewidth. when a short range target becomes eclipsed by the transmit
306 P R O C E E D I N G S O F T H EIEEE, VOL. 73.NO, 2, FEBRUARY 1985
pulse. The increased sidelobe levelscan become a source set" becomes a function of operational conditions such as
of false alarms and can mask adjacent targets. radar altitude, clutter levels, and speeds.
Polyphase codes mitigate both thedoppler sensitivity Extensiveanalysis effort during the early phases ofthe
losses and the higher sidelobe levels somewhat but are APG-66 design effort showed that with multiple PRFs per
moredifficultto implement. Pulse compression using dwell, the use of an "M of N" detectioncriterion was
quadruphase codes is finding increased use in radar systems superior to the "Major-Minor approach sometimesused.
because they can be mechanized with lower matched filter Notonly is the target dopplervisibility better but the
losses than with binary codes and the binary codes doppler system performance in sidelobe clutter is much improved.
sensitivity can be mitigated somewhat. The disadvantage of Some of the other considerations pertinent to PRF selection
these codes is the increased mechanization complexity. are the numberof PRFs per dwell,therejectionnotch
Chirp canalso be used for pulse compression but re- width, ghosting, and dopplervisibility. These will be dis-
quires rather high compression ratios, 30 or so, to be practi- cussed in the paragraphs which follow.
cal. At thehigher compression ratios, the pulse spectrum The number of PRFs processed during an antenna dwell
becomes approximately rectangular and low-loss matched time (the time it takes for the antenna mainbeam to scan
filters can be constructed. Either linear or nonlinear FM can over a target) is constrained on the high side by the avail-
be used, the linear FM being doppler insensitive but requir- able processing time. If the time becomes too long, the
ing more weighting with its subsequent losses to achieve antenna scan rate drops below an operationally acceptable
therequired sidelobes. Nonlinear FM canachieve better value. O n the low side, the number of PRFs per dwell has
sidelobes with lower losses than linear FM but becomes to be sufficient not only to resolve range but to insure good
doppler sensitive. doppler visibility, to be discussed below.
Two additional problems arise in a medium PRF wave- Ghosting considerations play an important part in the
form when a long transmitted pulsewidth is used. First, the PRF selection. With an "M of N" detectioncriterion in
long pulsewidth eclipses short range targets and often re- which, say, eight PRFs are processed and the detection
quires the additional complexityof an interleaved short- criterion i s any three of the eight, its importantnot to
pulse mode. Second, and more serious, the long pulsewidth generate false targets due to cross correlation. Fig. 9 shows
causes blind range regions in the unambiguous range inter- an example using three PRFs and a two-of-three detection
val, as illustrated in Fig. 8. The problem is analogous to the criterion. The pulse repetition intervals (PRI) for the three
PRFs shown are 7, 8, and 9 rangegates, respectively, such
RANGE FlMD + that for PRF 1, a target in range gate 4 appears in range gate
+
4,range gate 11 (PRI 4), range gate 18 (2*PRI 4),and so+
on. A target in rangegate 26 appears in rangegate 26
Modulo (PRI) so that for PRF 1 (PRI = 7) the target appears
in range gates 5,12, 19, 26, etc. Similarly, for PRF 2 (PRI = 8)
the target in gate 4 appears in gates 4,12, 20, 28, etc., and
the target in gate 26 appears in gates 2, IO, 18, 26, etc. The
correlation process for the three PRFs is shown in Fig. 9 and
1 2 4 6
RANGE GATE NO -
8 1 0 1 2 1 4 1 6 1 8 x i 2 2 2 4 2 6 z B J 0 5 2
PRF 1
Fig. 8.
RANGE -
Medium PRF blind ranges.
PRF 2
doppler visibility problem in the frequency domain, to be
discussed in the next section, in that the long blanked
intervals in range reduce the PRF visibility.
In summary then, while pulse compression can be used Fig. 9. Ghosting example-two PRF detection criterion.
to achieve the required short received pulsewidth,the
problems with doppler sensitivity, losses, time sidelobes,
blind ranges, and complexity make this a less than ideal with the two-of-three detection criterion, any time a target
choice. appears in at least two of the three PRFs, in the same range
PRF SELECTION gate, a detection is reported. As shown, the real targets in
gates 4 and 26 line up in range (correlate) in all three PRFs
One of the most difficult and tedious design problems in and are reported as a detection. However, in gates 12 and
medium PRF design is the PRF selection. Not only are there 18, the two real targets mix across two of the PRFs and yield
a number of system constraints on the PRFs but the "best a false report at these ranges. In a practical situation, more
LONG A N D HARRICER: MEDIUM PRF FOR THE AN/APC-66 RADAR 307
(KHz) PRF
NOTCHf 55 KNOT
REJECTION
* PASSBAND DOPPLER
NOTCH
- PRFl
0
k-
*
13 - b I
PRF 2
0
10 - c 4
PRF 3
0
PRF 4
9- # 1 0
PRF 5 2xPRF 5
8- I 4 0 I I 0
TARGET VELOCIM . KNOTS
Fig. 10. Doppler visibility, number of PRFs visible versus target velocity.
range gates are used in the pulse repetition interval which
tends to minimize ghosts. The PRFs then have to be care- Irn r
fully chosen not only to unambiguously resolve the range
but to minimize the number of possible cross correlations
when dealing with multiple targets.
Of equal importance with ghost free ranging is the dop-
pler visibility which refers to the usable doppler passband
between PRF lines. An example is shown in Fig. 10 which
shows the doppler visibility for an arbitrary five PRF set.
Here the abscissa is the target’s radial component of veloc-
itytowardthe radar with respect to the ground. It is
assumed that the main beam clutter has been hetrodyned
to dc so that the relative radar-target velocity is unim-
portant, only the target component of velocity counts. This
would mean that even if the radar and target were traveling 1 I I I I 1
co-speed in a tail chase condition, where the range rate is 45 x) 55 80 65 x)
zero, the target’s doppler visibility would be determined by
3dB HALF NOTCH WIDTH- KNOTS
its speed with respect to the ground, not the range rate.
The blanked regions around the PRF lines represent the Fig. 11. Percent doppler passband visible in two PRFs.
dopplerrejection notch and the 3-dBpassband width is
represented by the solid lines. A k55-knot rejection notch
is assumed. Also shown in Fig. 10 is the number of PRFs evidence when thetarget is competing with sidelobe clutter.
visible in doppler versus the target’s velocity. In this exam- At those target dopplers where the PRF visibility is the
ple, two or more PRFs are visible at all target speeds shown. minimum for detection, any sidelobe clutter degradation
If the detection criterion were,say, three out of the five results in acorresponding range performance reduction.
PRFs, the doppler regions where only two PRFs are visible Conversely, wherethe PRF visibility is high, the range
would represent blind speeds. At these target velocities, the performance is not degraded as much by sidelobe clutter
radar is blind tothe target at all ranges thus blind speeds for since its morelikely that the target will be visible in a
any speeds of interest are generally unacceptable. sidelobe clutter free interval.
A good figure of merit for doppler visibility is the per-
centage of the doppler passband which has the minimum
SIDELOBE CLUTTER
CONSIDERATIONS
PRF visibility for detection. Assuming the five PRF set shown
above and a two-of-five detection criterion, the percentage In a previous discussion it was stated that with a low PRF
of the doppler passband below 500 knots visible in only waveform the sidelobe clutter can be largely suppressed by
two PRFs is plotted versus the half-notch width in Fig. 11. a front-end STC which, in turn, eases the antenna sidelobe
Here, a notch width of &70 knots with the five PRFs shown requirements. When using a high PRF waveform, onthe
would have over 50 percent of the doppler passband visible other hand, often only the doppler spectrum clear of side-
in only twoPRFs. lobe clutter is processed, in which case the sidelobe clutter
The importanceof good dopplervisibility is much in level is of no consequence. In fact, some high PRF systems
308 P R O C E E D I N G S O F T H E IEEE, VOL. 73, NO. 2, FEBRUARY 1985
G, = ANTENNA
SIMLOBE
G,=uldB
LEVELS RELATIVE
TO MAINBEAM
\ CONSTANT FLOOR
LEVEL
I 0- = 45dB \
1 3 10 30
ALTITUDE. KFT
Fig. 12. Range extent of sidelobe clutter versus altitude.
use a uniformly weighted antenna aperture to maximize
gain and operate with the resulting high sidelobes.
In a medium PRF waveform the sidelobe levels are of
great importance and have adirect bearing on system
performance. Some insight can be gained into this by con-
sidering the range extent of sidelobe clutter for the case of
constant antenna sidelobe levels. Fig. 12 shows the sidelobe
clutter extent for a typical medium PRF system versus radar
altitude; the ordinate is range extent measured in I-ps gates
and the abscissa, altitude. Range extent is the difference in
range from the altitude line to the range where sidelobe
clutter equals thermal noise. Considering that the average
number of I-ps gates in an interpulse period is 90 or so, it is
evidentfrom Fig. 12 that whenthe sidelobe levelsget
above 45 dB, a significant portion ofthe unambiguous
range interval is covered by sidelobe clutter. For example,
with a 35-dB sidelobe level at 10000-ftaltitude 64 gates or
71 percent of the unambiguous range interval has sidelobe
clutter greater than thermal noise. As stated in the preced-
ing section, this would severely impact the detection per-
formance at those target dopplers where the minimum PRF
visibility is in effect.
A second consideration concerning sidelobe levels is the
sidelobes resulting from reflections off the radome walls. A
small portion of the antenna main beam is reflected off the
radome walls and forms a lobe which is generally on the Fig. 13. Radome reflection lobe geometry.
opposite side of the aircraft from the main lobe. This lobe,
commonly calledthereflectionlobe or image lobe, i s tionlobe is at a different angleand,hence, a different
usually broader thanthe main lobedue to defocusing frequency than the main beam. This is illustrated in Fig. 14
caused bythe curvature ofthe radome walls. Fig. 13 il- where the doppler angle is the angle of the reflection lobe
lustrates the geometry. The reflection lobe level is a com- with respect to the aircraft’s velocity vector.
plicated function of the radome’s length-to-diameter ratio, Radar returns from targets in the antenna sidelobes (in-
relative flatness, dielectric material, wall thickness, and cluding the reflection lobe) are prevented from causing
transmission frequency. false reports by using either a guard channel receiver or by
The primary concern regarding the reflection lobe is that an amplitude comparison scheme with a single receiver
large, discrete reflectors on the ground can become visible channel. With a guard channel, the received amplitudes
to the radar through this lobe and be reported as moving from awide-beamwidth,low-gain antenna are compared
targets, i.e.,falsealarms.Thereason for this is that even with returns from the main-channel receiver. If the guard
thoughthe reflectors are stationary on theground and amplitudes arelarger than the main amplitudes it is as-
would be normally rejected by the mainbeam clutter rejec- sumed that the returns are sidelobe returns and they are
tion notch, they have an apparent doppler since the reflec- blanked from further processing. The guard channel mecha-
LONG A N D H A R R I C E R : MEDIUM PRF F O R T H E A N / A P G 6 6 R A D A R 309
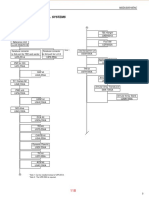
withfunctional autonomy plus an equipment rack.The
antenna, low-power RF, transmitter, digital signal processor,
REFLECTON
computer,and control panel LRUs are depicted in the
LOBE
ANGLE (R)
simplified block diagram of Fig. 15.
Antenna
The high-gain, low-sidelobe, planar-array antenna is
gimballed in two axes and mechanically counterbalanced
by an electric motor/tape drive system. Four nonreciprocal
phase shifters associated with the array's quadrants provide
silent sequential lobing for derivation of targetangle dis-
criminants. The antenna servo, controlled by the computer
F, = % ( C O S R -COS 11) AFTER CLLlTTrR TRACKING software scan pattern generatorvia digibus, utilizes re-
solvers for position sensing.
DOPPLER ANGLE = Cos-'[* +W]
Fig. 14. Reflection lobe apparent doppler. Low-Power RF
The functions of transmit signal generation and receive
nization requires an additional antenna (guard horn) and a signal conditioning are performed in the low-power radio
separate receiver channel and, thus, is more expensive than frequency (LPRF) unit. TheSTALO includes the reference
the single-channel approach. oscillators and frequency multiplier. The single-channel
In the single-channel approach, the received amplitudes analog receiver includes a passive receiver protector with
are compared against expected values on an unambiguous diode attenuatorfor automatic gain control(AGC) and
range basis and a determination is made whether the re- sensitivity timecontrol (STC) functions, alow-noise FET
turns are from a sidelobe or in the main beam ofthe amplifier, and a triple-conversion superheterodyne receiver.
antenna; the sidelobe returns are rejected from further The receiver baseband video signal is processed through a
target processing [3].TheAPG-66uses the single-channel dumped integrator for pulse-matched filtering prior to A/D
approach. conversion.
AN/APG-66 MECHANIZATION Transmitter
The AN/APG-66 is mechanized with digital technology The transmitter amplifier is a wide-band traveling-wave
to provide high reliability and is controlled by computer tube (TWT) suppliedfroma high-voltage powermodule
software to provide a high degree of flexibility. Harmoniza- and grid pulser packaged within a gas-filled pressure vessel.
tion of radar assemblies is eliminated by automatic calibra- Grid pulse coupling from low-voltage to high-voltage cir-
tions performed as part of the self test/built in test (ST/BIT) cuits is via fiber-optic cables. Low-voltage and ion-pump
maintainability features. Radar functions are computer con- power supplies, as well as protection and control circuits
trolled via bidirectional data busses (Digibus and DSP bus) comprise the remainder of the transmitter unit.
internally, and the F-16 Avionics Mil-Std-1553 multiplex bus
externally. Each LRU incorporates an integral power supply, Digital Signal Processor
test stimuli as well as fault sensors, power (missing 400-H~
phase), and thermal interlocks. The digital signal processing hardware is configurable to
The radar is organized as six-line replaceable units (LRUs) a large extent by multiplexers to provide algorithm selec-
E
a Antenna
W I
31 0 P R O C E E D I N G S O F T H E IEEE. VOL. 73, NO, 2, FEBRUARY 1985
tion under control of computer software. Extensive parame- SUMMARY
MECHANIZATION
ter programmability, especially in the system timing genera-
APG-66 mechanized characteristics are summarized be-
tor (synchronizer), provides the flexibility required for the
low:
multimode radar. Processing in air-to-air modes includes
clutter cancellation for downlook mode, Dolph-Chebychev
volume 4 ft3
weighted 64-point FFT doppler filtering, detection, constant
weight 300 Ib
false alarm rate (CFAR) adaptive thresholding, and range
power 3.7 kW
correlation. In air-to-surface noncoherent modes, processing
cooling air cooled at 1 2 Ib/min
includes video detection, post-detection integration, loga-
electronic parts 9500
rithmic compression, and digital scan conversion of data to
serialized assemblies 147
provide RS-I70 composite video for display of symbolics
reliability 97-h demonstrated MTBF
and real video.
maintenance 5-min flightline MTTR.
Arithmetic processing flow is structured as a pipeline; a
complex “butterfly” stage and 26K-bits of scratchpad RAM
perform the 64-point FFT in 224 p s . A bulk memory of 218
bits serves as a corner turn memory in air-to-air modes and CONCLUSION
as a display refresh memory for the scan converter in The AN/APG-66 multimode radarwas designed as a
air-to-surface modes. Clutter amplitude and frequency dis- modular system with features of high reliability, excellent
crimination circuitry is provided for AGC and main beam maintainability, and flexibility. The design-to-affordable cost
clutter tracking functions. Map reference generation cir- aspect of the program ledto a medium PRF downlook
cuitry is incorporated, under computercontrol, for the mode that was optimizedin terms of transmitter peak
Doppler Beam Sharpening mode. power, PRF selection, and sidelobe clutter rejection. Exten-
sive operational experience has proven that the radar meets
Radar Computer or exceeds the design specifications. Unprecedented field
The radar computer (.RC) is a general-purpose-type com- reliability has been achieved; for the year1983, the radar’s
puter with single CPU having 16-bit fixed-point sequential MTBF was 102.9 h based on 64204 operating hours at two
operation under control of a stored program residing in 48K operational air bases.
words of EPROM memory. CPU instructions are micropro-
grammed sequences residing in PROM, and operations are
facilitated with eight general-purpose registers and eight
registers for interrupt handling. REFERENCES
The speed capabilityofthe RC is 800K to W O K oper-
5. A.Hovanessian, “Medium PRF performance analysis,” /E€€
ations/s for the instruction mix that implements the radar Trans. Aerosp. Electron. Syst., vol. AES-18, no. 3, pp. 286-2%,
control functions. May 1982.
D. H. Mooney and W. A. Skillman, ”Pulse doppler radar,” in M.
Radar Control Panel I. Skolnik, Ed.,Radar Handbook. New York: McCraw-Hill,
1970, ch. 19.
The radar control panel (RCP) provides for thepilot’s M. 6. Ringel, D. H. Mooney, and W. H. Long 111, “F-16 pulse
manual interaction with the radar. The front panel is edgelit doppler radar (AN/APG-%) performance,” /E€€ Trans. Aerosp.
Electron. Syst., vol. AES-19, no. 1, pp. 147-158, Jan. 1983.
and contains seven multiposition switches for selection of M. B. Ringel, “An advanced computer calculation of ground
radar mode, range scale,scan pattern, RF frequency, and clutter in an airborne pulse doppler radar,” in /E€€ NAECON
radar video display features. Rec., pp. 921 -928, 1977.
LONG A N D HARRIGER: MEDIUM PRF F O R THE AN/APG& RADAR 311
You might also like
- Universal Armament Interface (UAI)Document36 pagesUniversal Armament Interface (UAI)seunghyun songNo ratings yet
- Evolving The Relationship Trolling ErDocument19 pagesEvolving The Relationship Trolling ErsamlagroneNo ratings yet
- Dcs A-10 Cold Start ChecklistDocument10 pagesDcs A-10 Cold Start ChecklistAngus HiscoeNo ratings yet
- TruTrak Evolution Type II FINAL - Cleared 08aug12Document2 pagesTruTrak Evolution Type II FINAL - Cleared 08aug12smouhabNo ratings yet
- Global Civil Aviation Flight Training and Simulation Market Growth Trends and Forecasts 2014 - 2019Document9 pagesGlobal Civil Aviation Flight Training and Simulation Market Growth Trends and Forecasts 2014 - 2019Sathish KumarNo ratings yet
- Armor Shield RDocument2 pagesArmor Shield RAternumNo ratings yet
- Radar ProblemsDocument18 pagesRadar Problemssaiful azaharNo ratings yet
- MTI RadarDocument19 pagesMTI RadarGayathriNo ratings yet
- Ge Logiq f6 Color Doppler PDFDocument18 pagesGe Logiq f6 Color Doppler PDFمهندس احمد حفنيNo ratings yet
- F-16 Radar Computer For The APG-66 Pulse Doppler RadarDocument8 pagesF-16 Radar Computer For The APG-66 Pulse Doppler Radarmetroplex_cl100% (1)
- Military Radars: Raghu Guttennavar 2KL06TE024Document23 pagesMilitary Radars: Raghu Guttennavar 2KL06TE024Shreedhar Todkar100% (1)
- 4th PIL CompDocument8 pages4th PIL CompArun Kastwar100% (1)
- Coles Beyond Benchmark Report PDFDocument124 pagesColes Beyond Benchmark Report PDFDylan100% (1)
- 2K12 KUB ModernizationDocument11 pages2K12 KUB Modernizationsvinche43546100% (1)
- 1992-Airborne IR Point-Detection SystemDocument14 pages1992-Airborne IR Point-Detection SystemLK DAINo ratings yet
- ICAO-IMO JWG-SAR-28-IP.2 - New Self-Locating Datum Marker Buoy (Australia)Document5 pagesICAO-IMO JWG-SAR-28-IP.2 - New Self-Locating Datum Marker Buoy (Australia)Martin Ni100% (1)
- Sonar 2076Document2 pagesSonar 2076Henrique NetoNo ratings yet
- Tacticos: Combat Management SystemDocument14 pagesTacticos: Combat Management Systemabrahamy lincoln100% (1)
- BMS Range Ops V22Document12 pagesBMS Range Ops V22Johnny AgudeloNo ratings yet
- V22 Osprey 2008 Por Bolkcom e Knight CRS 21pDocument21 pagesV22 Osprey 2008 Por Bolkcom e Knight CRS 21pJoão Pedro JukNo ratings yet
- The DCS AIM-7 Sparrow: Range, Geometry, PhoenixDocument17 pagesThe DCS AIM-7 Sparrow: Range, Geometry, Phoenixkaron-rexNo ratings yet
- Future of Collective Training: MTDS Program for Joint Mission ExercisesDocument4 pagesFuture of Collective Training: MTDS Program for Joint Mission Exercisesamiry1373No ratings yet
- Jane's Defence Weekly Vol 42 Issue 02 Jan 12 2005Document36 pagesJane's Defence Weekly Vol 42 Issue 02 Jan 12 2005Приходько РомаNo ratings yet
- Anao MPR 2016 17 Pdss4 Mrh90helicoptersDocument12 pagesAnao MPR 2016 17 Pdss4 Mrh90helicoptersAnonymous cGMk7iWNbNo ratings yet
- JED+ +JulyAugust+2020Document60 pagesJED+ +JulyAugust+2020DIckHEAD100% (1)
- F-35 Information FusionDocument22 pagesF-35 Information Fusionmahoro100% (1)
- Link 22 Guidebook Slides-10oct2018Document3 pagesLink 22 Guidebook Slides-10oct2018hyeonu100% (1)
- The US Army's New Black Hawk Helicopter Replacement, The Bell v-280 Valor. (REVISED)Document2 pagesThe US Army's New Black Hawk Helicopter Replacement, The Bell v-280 Valor. (REVISED)UthaNo ratings yet
- V2 N4 1981 Flanagan Advanced PDFDocument3 pagesV2 N4 1981 Flanagan Advanced PDFraa2010100% (1)
- Eagle EyeDocument25 pagesEagle EyeSilambarasan AnumuthuNo ratings yet
- CAE MAD-XR DatasheetDocument2 pagesCAE MAD-XR Datasheetrengab100% (1)
- Unsung Hero: AIM-7 Sparrow: DCS AIM-7 - Part IDocument6 pagesUnsung Hero: AIM-7 Sparrow: DCS AIM-7 - Part Ikaron-rexNo ratings yet
- Aspid On KubDocument11 pagesAspid On KubMarcus Wolf100% (1)
- Air War Over Libya The Lessons For FuturDocument33 pagesAir War Over Libya The Lessons For FuturИван КозубовNo ratings yet
- Gripen e Fact Sheet enDocument2 pagesGripen e Fact Sheet enVignesh SaptharishiNo ratings yet
- MSTP Pamphlet Command and Staff - ActionsDocument126 pagesMSTP Pamphlet Command and Staff - ActionsCoq RougeNo ratings yet
- Jedec Standard: Customer Notification of Product/Process Changes by Semiconductor SuppliersDocument10 pagesJedec Standard: Customer Notification of Product/Process Changes by Semiconductor SuppliersPiotr MarjakNo ratings yet
- Littoral Operations - The UK PerspectiveDocument31 pagesLittoral Operations - The UK PerspectiveBagus Sutrisno100% (1)
- Rethinking The Relationship Between Ew and Emso: Journal of Electromagnetic DominanceDocument44 pagesRethinking The Relationship Between Ew and Emso: Journal of Electromagnetic DominanceDIckHEAD100% (1)
- Aesa LpiDocument71 pagesAesa Lpiسروش حیدرNo ratings yet
- 2017 AUSA Redstone Huntsville Missile Symposium SlidesDocument129 pages2017 AUSA Redstone Huntsville Missile Symposium SlidesFelixA99No ratings yet
- Conventional (AIP) Submarine - A Weapon of Choice For The 21st CenturyDocument6 pagesConventional (AIP) Submarine - A Weapon of Choice For The 21st CenturyRodel Delos ReyesNo ratings yet
- A Chaff Cloud ModelisationDocument4 pagesA Chaff Cloud ModelisationAshwani Singh100% (1)
- The Indian Navy Is A Well Balanced and Cohesive Three Dimensional ForceDocument4 pagesThe Indian Navy Is A Well Balanced and Cohesive Three Dimensional ForceRitesh SehrawatNo ratings yet
- Aerodrome Chart of Goa 2Document1 pageAerodrome Chart of Goa 2confirm@No ratings yet
- Distributed Simulation Testing For Weapons System Performance of The F/A-18 and AIM-120 AmraamDocument17 pagesDistributed Simulation Testing For Weapons System Performance of The F/A-18 and AIM-120 AmraamkepakkoNo ratings yet
- Ka-32 Helicopters Performance & SpecificationsDocument27 pagesKa-32 Helicopters Performance & Specifications김덕규100% (1)
- Mission 01 Briefing SlidesDocument11 pagesMission 01 Briefing SlidesKalevka Lynch100% (1)
- Maritime Staff Reference Guide - Combined File - Dec 2019Document92 pagesMaritime Staff Reference Guide - Combined File - Dec 2019Francisco GarayNo ratings yet
- Syrian Military Tactics ReportDocument31 pagesSyrian Military Tactics ReportAmin Salama100% (1)
- Combat and Casualty Care TruePDF-Winter 2015Document40 pagesCombat and Casualty Care TruePDF-Winter 2015killjoymsfNo ratings yet
- Indra RadarDocument8 pagesIndra RadarDR DONo ratings yet
- U Dai Fts T Unmanned Aircraft Systems January 9, 2009: Unmanned Warfare Ousd (At&L)Document32 pagesU Dai Fts T Unmanned Aircraft Systems January 9, 2009: Unmanned Warfare Ousd (At&L)wangxiaoming_0No ratings yet
- Naval Postgraduate School: Monterey, CaliforniaDocument86 pagesNaval Postgraduate School: Monterey, CaliforniaWaleedWaelNo ratings yet
- Branko Petricevic - Activity of The Hydrographic Institute of The Republic of Croatia and Integrated Hydrographic SystemsDocument23 pagesBranko Petricevic - Activity of The Hydrographic Institute of The Republic of Croatia and Integrated Hydrographic Systemslapost_fer100% (1)
- 3 ESRA - Risk Management Standard - 24112009 PDFDocument25 pages3 ESRA - Risk Management Standard - 24112009 PDFpahala pardedeNo ratings yet
- 3D Lanza Radar Family: Defense and SecurityDocument6 pages3D Lanza Radar Family: Defense and SecurityRINGUYENEZA Thimothe0% (1)
- AFM - Vol 2 - Generic Enemy (Basic Forces) - Part 3 - OrBATsDocument148 pagesAFM - Vol 2 - Generic Enemy (Basic Forces) - Part 3 - OrBATsPG100% (1)
- Nal Technical BrochuresDocument42 pagesNal Technical BrochuresManish Singh100% (1)
- Verification of 1D Surf Model for Steep BeachesDocument41 pagesVerification of 1D Surf Model for Steep BeachesNini Brevis100% (1)
- EFT Stratguide GB 72dpiDocument137 pagesEFT Stratguide GB 72dpic4c4100% (1)
- Methods of Radar Cross-section AnalysisFrom EverandMethods of Radar Cross-section AnalysisJ.W. Jr. CrispinNo ratings yet
- A Microprocessor Based Clutter Canceller For Life Locator SystemDocument6 pagesA Microprocessor Based Clutter Canceller For Life Locator SystemPln DivyaNo ratings yet
- MTI RadarDocument18 pagesMTI RadarShady DerazNo ratings yet
- Monostatic and Bistatic Radar Measurements of Birds and Micro-DroneDocument5 pagesMonostatic and Bistatic Radar Measurements of Birds and Micro-DroneMarius CheroiuNo ratings yet
- NPS Ec 14 003Document139 pagesNPS Ec 14 003maruka33No ratings yet
- Department of Electronics and Communication Engineering: 2 and 16 Mark Questions and AnswersDocument16 pagesDepartment of Electronics and Communication Engineering: 2 and 16 Mark Questions and Answersanjali9myneni100% (1)
- Basic Radar Signal Processing: Joshua Semeter, Boston UniversityDocument47 pagesBasic Radar Signal Processing: Joshua Semeter, Boston UniversityRaham CastilloNo ratings yet
- Radar SystemsDocument129 pagesRadar Systemsanurag srivastavaNo ratings yet
- The Phenomenal APG-63 Brochure 001Document50 pagesThe Phenomenal APG-63 Brochure 001MMoranNo ratings yet
- Excel Review Center ECE Refresher/Coaching Estth1Document4 pagesExcel Review Center ECE Refresher/Coaching Estth1Danica Luisa GazaaNo ratings yet
- Ugc-Svu Centre For MST Radar Applications,: University Grants Commission NewdelhiDocument75 pagesUgc-Svu Centre For MST Radar Applications,: University Grants Commission NewdelhiArun AchalamNo ratings yet
- Radar SyllabusDocument2 pagesRadar SyllabusGajula Suresh100% (1)
- Supernet: Marine ElectronicsDocument4 pagesSupernet: Marine ElectronicsRishabh PandeyNo ratings yet
- Voluson E10 BT15: GE HealthcareDocument18 pagesVoluson E10 BT15: GE Healthcareyujuncheng12100% (1)
- Human Sensing EnalabWIPDocument35 pagesHuman Sensing EnalabWIPJohnDevNo ratings yet
- Sbs 900Document2 pagesSbs 900almazNo ratings yet
- Nemio Sd730-004ed - ADocument123 pagesNemio Sd730-004ed - AJhonn Hidalgo PerezNo ratings yet
- EW Scenario Simulator (EWSS) Fact SheetDocument2 pagesEW Scenario Simulator (EWSS) Fact SheetHutch Rev Oliver100% (1)
- Radar Cat 1 AnswerDocument6 pagesRadar Cat 1 AnswerMuhire NorbertNo ratings yet
- Mti Radar: BY: A. Ajay KumarDocument31 pagesMti Radar: BY: A. Ajay KumarsnehaNo ratings yet
- Medium To Long Range AESA Air & Surface Surveillance RadarDocument2 pagesMedium To Long Range AESA Air & Surface Surveillance RadarShiva SinghNo ratings yet
- 2 Radar Systems SyllabusDocument1 page2 Radar Systems SyllabuslakkepoguNo ratings yet
- X Band Doppler Radar: Htet Htet Yi, Ei Phyu SoeDocument6 pagesX Band Doppler Radar: Htet Htet Yi, Ei Phyu SoeMohit MeenaNo ratings yet
- SCVDocument2 pagesSCValmazNo ratings yet
- Kuschel, H. VHF-UHF Radar: Part 2. Operational Aspects and ApplicationsDocument11 pagesKuschel, H. VHF-UHF Radar: Part 2. Operational Aspects and ApplicationsDhimas Afihandarin100% (1)
- Sonosite Echo Machine Model MicromaxxDocument100 pagesSonosite Echo Machine Model MicromaxxAakshiRajputNo ratings yet
- 레이다 신호처리 과정 이해하기Document90 pages레이다 신호처리 과정 이해하기Wesley GeorgeNo ratings yet
- Voluson S6 Data SheetDocument15 pagesVoluson S6 Data SheetNanang YlNo ratings yet