You might also like
- Lecture SlidesDocument139 pagesLecture SlidesMohamed BenjellounNo ratings yet
- Classical Propositional Logic (Quick Review) : Episode 4Document14 pagesClassical Propositional Logic (Quick Review) : Episode 4Sarbu AnaNo ratings yet
- Discrete Lecture04Document18 pagesDiscrete Lecture04roseNo ratings yet
- Natural Language Processing For Information Retrieval: Hugo ZaragozaDocument52 pagesNatural Language Processing For Information Retrieval: Hugo ZaragozaheroNo ratings yet
- Teachersneed InfoDocument41 pagesTeachersneed InfosainathNo ratings yet
- FirstLessonsinLatinoranIntroductiontoAndrewsandStoddardsLatinGrammar 10480999Document217 pagesFirstLessonsinLatinoranIntroductiontoAndrewsandStoddardsLatinGrammar 10480999Alyson BakerNo ratings yet
- Lecture 2Document21 pagesLecture 2Mohieddine FaridNo ratings yet
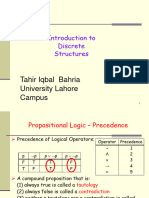
- Precedence of Logical Operators: E.g. ¬p q p q ν r = (p q) ν r p ν q r = p ν (q r)Document23 pagesPrecedence of Logical Operators: E.g. ¬p q p q ν r = (p q) ν r p ν q r = p ν (q r)Musawar AliNo ratings yet
- 5 - SyntaxDocument102 pages5 - SyntaxMATTHEW JALOWE MACARANASNo ratings yet
- Lecture No 2 Logic Theory 03102022 044417pm 20022023 061239pmDocument11 pagesLecture No 2 Logic Theory 03102022 044417pm 20022023 061239pmMomna JavedNo ratings yet
- R. O. Morris Contrapuntal Technique in The Sixteenth Century PDFDocument136 pagesR. O. Morris Contrapuntal Technique in The Sixteenth Century PDFJohn Esposito100% (2)
- Electrostatic Potential and CapacitanceDocument14 pagesElectrostatic Potential and CapacitanceGranth SinghNo ratings yet
- iPrEx Update 3Document8 pagesiPrEx Update 3bbplathNo ratings yet
- Inform: - Expressions and Operators - ConstantsDocument4 pagesInform: - Expressions and Operators - ConstantsDavid RogersNo ratings yet
- Discrete Structure Lecture 2Document38 pagesDiscrete Structure Lecture 2Hafiz HammadNo ratings yet
- Adobe Scan Aug 29, 2022Document2 pagesAdobe Scan Aug 29, 2022Evans MakoriNo ratings yet
- A Short History of The English DramaDocument275 pagesA Short History of The English DramaBujang TerlajakNo ratings yet
- Focus 2 Unit 6Document12 pagesFocus 2 Unit 6Egemen ARDANo ratings yet
- Roderickmichailidis Megan Thompson Tamzin Grammar Heroes 1 PDFDocument112 pagesRoderickmichailidis Megan Thompson Tamzin Grammar Heroes 1 PDFAndarielle ConstanceNo ratings yet
- ADocument3 pagesAKumar AnupamNo ratings yet
- MMW Math LOGICDocument33 pagesMMW Math LOGICJP ResurreccionNo ratings yet
- Carrier Generation and RecombinationDocument32 pagesCarrier Generation and RecombinationsattmshivaNo ratings yet
- Frequently Asked Questions: Curricula Translations: Translation Q. ADocument5 pagesFrequently Asked Questions: Curricula Translations: Translation Q. AJuan David Montoya GonzálezNo ratings yet
- CSE 473: Artificial Intelligence: Spring 2014Document46 pagesCSE 473: Artificial Intelligence: Spring 2014HunterxHunter03No ratings yet
- Arabit Vs Jardine PacificDocument3 pagesArabit Vs Jardine PacificJanine ChloeNo ratings yet
- 6 - Super-Cheatsheet-MathematicsDocument5 pages6 - Super-Cheatsheet-Mathematicskhaled aliNo ratings yet
- Worksheet JAPAN LANGUAGE PDFDocument52 pagesWorksheet JAPAN LANGUAGE PDFBidari Putri RosadiNo ratings yet
- Formal MethodsDocument67 pagesFormal MethodsMohammed AlshamiNo ratings yet
- F - P P II: Lesson ReviewDocument2 pagesF - P P II: Lesson ReviewAashir AliNo ratings yet
- Tilawah TH 4Document10 pagesTilawah TH 4Muhd MuadzNo ratings yet
- Lecture-2 PropPred MergedDocument35 pagesLecture-2 PropPred MergedAleezay AmirNo ratings yet
- Web Design PrinciplesDocument12 pagesWeb Design PrinciplesKartik Gupta 71No ratings yet
- English Grammar For All LevelsDocument21 pagesEnglish Grammar For All Levelsnagi zomrawiNo ratings yet
- AHigherEnglishGrammar 10003175Document389 pagesAHigherEnglishGrammar 10003175Jorge Orrego BravoNo ratings yet
- Week 3Document42 pagesWeek 3Anonymous GuQd67No ratings yet
- OLS 2 VariablesDocument55 pagesOLS 2 Variables09 Hiba P VNo ratings yet
- Fifth Grade Summer Learning Pack PreviewDocument105 pagesFifth Grade Summer Learning Pack PreviewSonia Garcia TorresNo ratings yet
- Q1 W6 D1&D2 StatisticsDocument29 pagesQ1 W6 D1&D2 StatisticsAbegail AbordeNo ratings yet
- Basic Parsing With Context-Free Grammars: Some Slides Adapted From Julia Hirschberg and Dan JurafskyDocument44 pagesBasic Parsing With Context-Free Grammars: Some Slides Adapted From Julia Hirschberg and Dan JurafskyNabeel AkramNo ratings yet
- Formula RioDocument2 pagesFormula RiololoNo ratings yet
- Kinematics5 SlidesDocument10 pagesKinematics5 SlidesMuntoiaNo ratings yet
- Mathematical Logic TTH 12Document10 pagesMathematical Logic TTH 12Kris CruzNo ratings yet
- Probability DistributionsDocument12 pagesProbability DistributionsAditya P SajjanNo ratings yet
- MMW Module 2 Math LogicDocument28 pagesMMW Module 2 Math LogicJeanisa FusinganNo ratings yet
- DISCRETEMATHDocument18 pagesDISCRETEMATHAlryel Kenn AngeloNo ratings yet
- DiscreteMath Chap1 LogicDocument50 pagesDiscreteMath Chap1 LogicMhmd MnsurNo ratings yet
- Head First StatDocument16 pagesHead First StatHarsh GajbhiyeNo ratings yet
- UnitDocument3 pagesUnitkryonicmelNo ratings yet
- Natural Language Processing: ParsingDocument18 pagesNatural Language Processing: Parsingritesh sinhaNo ratings yet
- MT131 Tutorial - 1 Logic 3Document58 pagesMT131 Tutorial - 1 Logic 3amr alzaktaNo ratings yet
- 8.2 NotesDocument2 pages8.2 NotesFausto SosaNo ratings yet
- Discrete Mathematics Chapter 1 Without AnnotatonDocument27 pagesDiscrete Mathematics Chapter 1 Without AnnotatonLakshmi narayanan S kNo ratings yet
- Probabilistic Information RetrievalDocument48 pagesProbabilistic Information RetrievalRahul KumarNo ratings yet
- Certificate in Business Statistics (VRQ) : Pearson LCCIDocument24 pagesCertificate in Business Statistics (VRQ) : Pearson LCCICinxinNo ratings yet
- Differential Evolution and Variants: Rajesh KumarDocument33 pagesDifferential Evolution and Variants: Rajesh KumarJuhi GargNo ratings yet
- IS 7118 Unit-4 N-GramsDocument93 pagesIS 7118 Unit-4 N-GramsJmpol John100% (1)
- Computer Test Paper For Icse 10Document3 pagesComputer Test Paper For Icse 10AK WARRIOR GAMINGNo ratings yet
- Syntactic Analysis Ii (Parsing Using CFGS) : Dr. Sukhnandan Kaur TietDocument36 pagesSyntactic Analysis Ii (Parsing Using CFGS) : Dr. Sukhnandan Kaur TietYash DhawanNo ratings yet
- Lecture 10Document101 pagesLecture 10adrienleeNo ratings yet
- Lecture 9Document65 pagesLecture 9adrienleeNo ratings yet
- Lecture 7Document71 pagesLecture 7adrienleeNo ratings yet
- Lecture 17Document170 pagesLecture 17adrienleeNo ratings yet
- Lecture 5Document23 pagesLecture 5adrienleeNo ratings yet
- Lecture 1Document30 pagesLecture 1adrienleeNo ratings yet
- Lecture 14Document73 pagesLecture 14adrienleeNo ratings yet
- Lecture 12Document48 pagesLecture 12adrienleeNo ratings yet
- Lecture 8Document45 pagesLecture 8adrienleeNo ratings yet
- Lecture 4Document24 pagesLecture 4adrienleeNo ratings yet
- Lecture 2Document13 pagesLecture 2adrienleeNo ratings yet
- Result - Final (Annexure - I) - 923680Document25 pagesResult - Final (Annexure - I) - 923680patelsandip1989No ratings yet
- SAP CO-PC Material Cost Estimate - EUGDocument38 pagesSAP CO-PC Material Cost Estimate - EUGLantNo ratings yet
- Artikel Ibnu Khaldun Dan Adam SmithDocument11 pagesArtikel Ibnu Khaldun Dan Adam SmithKo Ko Ko KoNo ratings yet
- Bharat Petroleum: Star PEB India Private LimitedDocument10 pagesBharat Petroleum: Star PEB India Private LimitedParvinder Kaur100% (1)
- Lesson Plan - COADocument4 pagesLesson Plan - COAmvdurgadeviNo ratings yet
- DsersDocument15 pagesDsersT JNo ratings yet
- SerDes - WikipediaDocument3 pagesSerDes - WikipediaPronadeep BoraNo ratings yet
- Schedule of Dimensions - Bansal PDFDocument52 pagesSchedule of Dimensions - Bansal PDFMahmood MuftiNo ratings yet
- Service Manual: Split Type Room Air ConditionerDocument14 pagesService Manual: Split Type Room Air ConditionerMuhamad PriyatnaNo ratings yet
- ManageEngine Desktop CentralDocument629 pagesManageEngine Desktop CentralCarlos RamirezNo ratings yet
- Anypoint Platform Development: Fundamentals (Mule 4) Setup RequirementsDocument3 pagesAnypoint Platform Development: Fundamentals (Mule 4) Setup RequirementsKakz KarthikNo ratings yet
- The Disadvantages of An NTFS File SystemDocument3 pagesThe Disadvantages of An NTFS File Systemwip789No ratings yet
- Topic 1 Assignment: Navigating GCU Resources & Writing ExpectationsDocument7 pagesTopic 1 Assignment: Navigating GCU Resources & Writing ExpectationsBlake ChambersNo ratings yet
- Magazine: Mcneel'S FL Ying CircusDocument36 pagesMagazine: Mcneel'S FL Ying CircusNoureddine SemaraNo ratings yet
- Service Manual PFR82GDocument18 pagesService Manual PFR82GliderfgvNo ratings yet
- Canyon RanchDocument3 pagesCanyon RanchBob_Meyer_4026100% (1)
- Alamo - Espiritu 1010 VF PDFDocument4 pagesAlamo - Espiritu 1010 VF PDFRolando DávilaNo ratings yet
- Technological Institute of The Philippines: Determination of COP of A Refrigeration SystemDocument15 pagesTechnological Institute of The Philippines: Determination of COP of A Refrigeration SystemDessa GuditoNo ratings yet
- ModuleDocument16 pagesModuleXzk MallaboNo ratings yet
- Data Sheet: NPN General Purpose TransistorDocument8 pagesData Sheet: NPN General Purpose TransistorNewsUPdateNo ratings yet
- WP Fantom v1.6Document50 pagesWP Fantom v1.6benfpierceNo ratings yet
- iCAT Mini iSTM Mini: Powerful Robot Torch Mounts of The Next GenerationDocument8 pagesiCAT Mini iSTM Mini: Powerful Robot Torch Mounts of The Next GenerationTiagoNo ratings yet
- Case Summary - Apple Inc: Syndicate 5Document2 pagesCase Summary - Apple Inc: Syndicate 5Diasty Widar HapsariNo ratings yet
- A. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdDocument70 pagesA. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdAmro AbosaifNo ratings yet
- Week 4 (Educational Technology) Answer KeyDocument4 pagesWeek 4 (Educational Technology) Answer KeyChristian PadillaNo ratings yet
- 3 Phase Six Step InverterDocument25 pages3 Phase Six Step InverterRavi karanNo ratings yet
- Ose 12 Twin Ose Boxer OkDocument2 pagesOse 12 Twin Ose Boxer OkOrlando Rojas PintoNo ratings yet
- HP AlmDocument13 pagesHP AlmvasundharaNo ratings yet
- Water Cooled Duct DesignDocument8 pagesWater Cooled Duct DesignpavanNo ratings yet
- Aircon Heat Load Calculation Sheet: Project Name: GO TAN HIEP Address: Bien Hoa Dong NaiDocument6 pagesAircon Heat Load Calculation Sheet: Project Name: GO TAN HIEP Address: Bien Hoa Dong NaiNGUYEN THANH LUANNo ratings yet