You might also like
- VF-nC3 Snabbstart ParameterlistaDocument7 pagesVF-nC3 Snabbstart ParameterlistaAnteneh BirhanieNo ratings yet
- Energiomvandling Ottomotor: LaborationsintruktionDocument9 pagesEnergiomvandling Ottomotor: Laborationsintruktionmahmoud sersawyNo ratings yet
- Autopiloter Och StyrsystemDocument76 pagesAutopiloter Och StyrsystemElpidaNo ratings yet
- Stiga Park: 100 COMBI 3Document84 pagesStiga Park: 100 COMBI 3Marcus CarlssonNo ratings yet
- 001 Felkoder Alla StyrenheterDocument13 pages001 Felkoder Alla Styrenhetercal93teNo ratings yet
- Toyota 7FB 10-35Document765 pagesToyota 7FB 10-35Hushanji100% (4)
- Verkstadshandbok Saab 900 1981-88 Grundmotor PDFDocument217 pagesVerkstadshandbok Saab 900 1981-88 Grundmotor PDFMozgoNo ratings yet
- SmörjschemaDocument3 pagesSmörjschemaConrad StahlNo ratings yet
- Leiten - Despiece - Robot Demoledor Brokk 110Document140 pagesLeiten - Despiece - Robot Demoledor Brokk 110juanpablomoriniNo ratings yet
- STIGA Mähwerk 95 CombiDocument92 pagesSTIGA Mähwerk 95 CombiMischa LinnemannNo ratings yet
- SEKVENSSTYRNINGDocument68 pagesSEKVENSSTYRNINGAndra NamnNo ratings yet
- 1.arcode Driftsättning Ver4Document51 pages1.arcode Driftsättning Ver4Сергей боубатрынNo ratings yet
- FILE - 20180621 - 141851 - Toyota 7FBDocument673 pagesFILE - 20180621 - 141851 - Toyota 7FBDuongNo ratings yet
- 1 FBMF 16-30Document495 pages1 FBMF 16-30SARAMQRNo ratings yet
- Husqvarna Rider 1030 InstruktionsbokDocument36 pagesHusqvarna Rider 1030 InstruktionsbokvondaweNo ratings yet
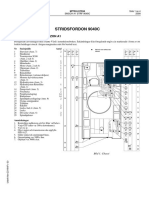
- Stridsfordon 9040C: Smörjschema Klimatzon A1Document4 pagesStridsfordon 9040C: Smörjschema Klimatzon A1fuckscribNo ratings yet
- Stabilock Servicemanual 4010 4011 4020 4022Document168 pagesStabilock Servicemanual 4010 4011 4020 4022JorgenOvergaardNo ratings yet
- 5fbe 10-20Document461 pages5fbe 10-20Dmitry HodNo ratings yet
- Modul Modul / Module R 726 Module R 726Document24 pagesModul Modul / Module R 726 Module R 726Luiz AlmeidaNo ratings yet
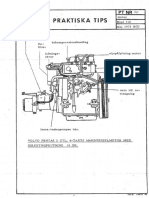
- PT Kap 5Document23 pagesPT Kap 5FlyForFunNo ratings yet
- Swedish-Kelly M3 CEFRDocument382 pagesSwedish-Kelly M3 CEFRhhhhhhqwNo ratings yet
- Stripbv Instruktionsbok. 1 Inledning FÖRSVARETS MATERIELVERKDocument17 pagesStripbv Instruktionsbok. 1 Inledning FÖRSVARETS MATERIELVERKJotteNo ratings yet
- Auma Sa072 162 Med Am011am021 Tekniska DataDocument9 pagesAuma Sa072 162 Med Am011am021 Tekniska DataAnders HermanssonNo ratings yet
- Brokk 330 Rev B3 SPL - Mechanical, Hydraulic & Control Unit 3136 8028 80-ADocument106 pagesBrokk 330 Rev B3 SPL - Mechanical, Hydraulic & Control Unit 3136 8028 80-AViet Nam M-Tech100% (1)
- Clark MegavalveDocument26 pagesClark MegavalveOlga PlohotnichenkoNo ratings yet
- 7008int1702 Sap Din Sapt DinDocument8 pages7008int1702 Sap Din Sapt Dinbrayan40No ratings yet
- Olsbergs PDFDocument20 pagesOlsbergs PDFRoman MazurNo ratings yet
- SPL GDocument90 pagesSPL GTri Maizon100% (1)
- Omborddiagnostik EOBD FelkoderDocument32 pagesOmborddiagnostik EOBD FelkoderPatrick StivénNo ratings yet
- Camozzi Trainingkit Styrteknik OverheaderDocument63 pagesCamozzi Trainingkit Styrteknik OverheaderMartin WillNo ratings yet
- Знімок екрана 2022-11-27 о 16.22.49Document1 pageЗнімок екрана 2022-11-27 о 16.22.49Олександр СлабоусNo ratings yet
- 9101675Document2 pages9101675Adnan AhmedNo ratings yet
- 1983Document2 pages1983Markus OlssonNo ratings yet
- 308 9009 3 4-0 - 6130 4-6150 4 - RVshift-TDocument4 pages308 9009 3 4-0 - 6130 4-6150 4 - RVshift-TDąmįąň MąčhųcąNo ratings yet
- 22kV Disconnect or Motor DataDocument52 pages22kV Disconnect or Motor Databhavinraval_089592No ratings yet
- Assa Abloy DAC 30II ManualDocument20 pagesAssa Abloy DAC 30II ManualGlenn KendallNo ratings yet
- 1ZSE 5492-156 SV Rev 3Document12 pages1ZSE 5492-156 SV Rev 3Claes HugosonNo ratings yet
- Curs Om2Document16 pagesCurs Om2Eduard Gabriel RadutaNo ratings yet
- Rco ManualDocument16 pagesRco ManualcortigeNo ratings yet
- Husqvarna Rider 13 12,5hpDocument36 pagesHusqvarna Rider 13 12,5hpmattiasNo ratings yet
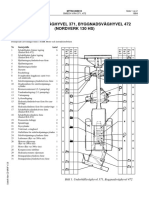
- Nordverk HVT GresareDocument2 pagesNordverk HVT GresareClaudiu MorarNo ratings yet
- Swedish-Kelly M3 CEFRDocument382 pagesSwedish-Kelly M3 CEFRsinan76No ratings yet
- Icm4 Se Ed0205 DatasheetDocument4 pagesIcm4 Se Ed0205 DatasheetEduardoXilenusNo ratings yet
- BMW S1000RR HP4 RACE 2017 Ownersmanual SwedishDocument197 pagesBMW S1000RR HP4 RACE 2017 Ownersmanual SwedishHenrik FalkNo ratings yet
- 1 PDFDocument4,624 pages1 PDFAl Bima100% (2)
- SV ACS880 07 HW F A4 With Update NoticeDocument262 pagesSV ACS880 07 HW F A4 With Update NoticeSyed FarhanNo ratings yet
- Assa Dac-30riiDocument20 pagesAssa Dac-30riiKevin StellerNo ratings yet
- VDO Dokument AllaDocument24 pagesVDO Dokument AllaOscar AlexandersonNo ratings yet
- FLYGH 2050.pçsDocument12 pagesFLYGH 2050.pçsSilva_MichelNo ratings yet
- Varvreg Bruksanvisning H-CANDocument6 pagesVarvreg Bruksanvisning H-CANErik BjörsellNo ratings yet
- Jurn 5Document1 pageJurn 5evanwatepNo ratings yet
- ST1030Document561 pagesST1030paul heberth areche conovilca100% (1)
- K1300R 2010 SE RDocument157 pagesK1300R 2010 SE RbeamfootNo ratings yet
- Datasheet Argodiode Battery Isolators SEDocument1 pageDatasheet Argodiode Battery Isolators SEnambinina.rakotoarimangaNo ratings yet
- Control System Up-DateDocument59 pagesControl System Up-Datemarcelo espinozaNo ratings yet
- T5550 PDFDocument84 pagesT5550 PDFQuintusNo ratings yet
- Linhai 300d SvenskDocument46 pagesLinhai 300d SvenskTony PerssonNo ratings yet
- BROKK 180 SVDocument188 pagesBROKK 180 SValanNo ratings yet
- Tid 0002675 00Document6 pagesTid 0002675 00Karunia LestariNo ratings yet
- Camozzi Trainingkit Styrteknik OverheaderDocument63 pagesCamozzi Trainingkit Styrteknik OverheaderMartin WillNo ratings yet
- Camozzi Trainingkit Styrteknik-LaborationsbokDocument103 pagesCamozzi Trainingkit Styrteknik-LaborationsbokMartin WillNo ratings yet
- 2TLC172002M3418 B Pluto Programming Manual (Swedish)Document143 pages2TLC172002M3418 B Pluto Programming Manual (Swedish)Martin WillNo ratings yet
- 2TLC172001M3412 B Pluto Hardware Manual (SV)Document56 pages2TLC172001M3412 B Pluto Hardware Manual (SV)Martin WillNo ratings yet
- 2TLC172005M3414 BDocument4 pages2TLC172005M3414 BMartin WillNo ratings yet
- Pluto Quick Guide (SV-EN-DE-IT) Revg 2TLC172045M9801Document2 pagesPluto Quick Guide (SV-EN-DE-IT) Revg 2TLC172045M9801Martin WillNo ratings yet