You might also like
- Practical Machinery Vibration Analysis and Predictive MaintenanceFrom EverandPractical Machinery Vibration Analysis and Predictive MaintenanceRating: 4.5 out of 5 stars4.5/5 (10)
- FULLTEXT01Document63 pagesFULLTEXT01BazinNo ratings yet
- Building A Capacitive Liquid SensorDocument10 pagesBuilding A Capacitive Liquid Sensordon chethiya de silvaNo ratings yet
- Electronics & Software.: Submitted byDocument85 pagesElectronics & Software.: Submitted byMohammed KhaledNo ratings yet
- Frameless Laser HarpDocument12 pagesFrameless Laser HarpLord_Darth_VaderNo ratings yet
- CMOS Imagers Thesis (Linkoping)Document85 pagesCMOS Imagers Thesis (Linkoping)pbt12No ratings yet
- Make An Oscilloscope Using The SainSmart Mega2560Document21 pagesMake An Oscilloscope Using The SainSmart Mega2560marius_danila8736No ratings yet
- LED Matrix Using Shift RegistersDocument20 pagesLED Matrix Using Shift RegistersPa RasNo ratings yet
- Wiper Motor and Arduino Mega ServoDocument6 pagesWiper Motor and Arduino Mega ServobolksoftNo ratings yet
- OscilloPhone Use Your Smartphone As An Oscilloscop PDFDocument22 pagesOscilloPhone Use Your Smartphone As An Oscilloscop PDFRodolfoPerezEscalonaNo ratings yet
- Measure RPM DIY Portable Digital TachometerDocument13 pagesMeasure RPM DIY Portable Digital TachometerMarius DanilaNo ratings yet
- LED Strip DIY GuideDocument11 pagesLED Strip DIY GuideAfter SpecsNo ratings yet
- Automated Test Rig For Electronic ProductsDocument60 pagesAutomated Test Rig For Electronic ProductsraasisNo ratings yet
- Controlled Charging of Electrical Vehicles On Residential Power GridDocument52 pagesControlled Charging of Electrical Vehicles On Residential Power GridHugo LoureiroNo ratings yet
- Wen Wen 2021 ThesisDocument114 pagesWen Wen 2021 ThesisNick GinoNo ratings yet
- Defective Pixel Correction: Henrik Backe-HansenDocument268 pagesDefective Pixel Correction: Henrik Backe-HansenMurat Yasar ERTASNo ratings yet
- Place Your Project Title at Here 4Document11 pagesPlace Your Project Title at Here 4Shakib HasanNo ratings yet
- Capacitive Sensing For DummiesDocument9 pagesCapacitive Sensing For DummiesAosh PayuranNo ratings yet
- Make A 24X6 LED MatrixDocument9 pagesMake A 24X6 LED MatrixAnsar TamboliNo ratings yet
- Tcpip For WSNDocument134 pagesTcpip For WSNathaur1992No ratings yet
- Build an Arduino-based optical tachometer to measure motor speedDocument12 pagesBuild an Arduino-based optical tachometer to measure motor speedMarius DanilaNo ratings yet
- Interactive Multitouch DisplayDocument23 pagesInteractive Multitouch DisplayMyintMoeNo ratings yet
- Base Station For Wireless Sensor Network: Michal Michal IkDocument64 pagesBase Station For Wireless Sensor Network: Michal Michal IkTARUN SAINo ratings yet
- Rensel K An Attitude Detumbling System For The CubeSTAR Nano Satellite PDFDocument181 pagesRensel K An Attitude Detumbling System For The CubeSTAR Nano Satellite PDFGonzalo Rafael Landaeta CorderoNo ratings yet
- An Implementation of A Visible LightDocument63 pagesAn Implementation of A Visible LightASRANo ratings yet
- Design and Modeling of InductorsNPAryanDocument88 pagesDesign and Modeling of InductorsNPAryanJoe MullerNo ratings yet
- Arduino Lie DetectorDocument7 pagesArduino Lie DetectoriNSECT ZaynNo ratings yet
- The 74HC164 Shift Register and Your ArduinoDocument13 pagesThe 74HC164 Shift Register and Your Arduinogeniunet100% (2)
- Desktop Muon Detector Building InstructionsDocument22 pagesDesktop Muon Detector Building InstructionsmjovicaNo ratings yet
- Designing Embedded Systems With Arduino Tianhong Pan Yi Zhu Springer 2017 PDFDocument229 pagesDesigning Embedded Systems With Arduino Tianhong Pan Yi Zhu Springer 2017 PDFEng .Aya SederNo ratings yet
- FULLTEXT01Document45 pagesFULLTEXT01Faiza Tabassam 546-FET/BSEE/F19No ratings yet
- Drone ImplementationDocument181 pagesDrone ImplementationFelipe CarvalhoNo ratings yet
- SensoDuino Turn Your Android Phone Into A WirelessDocument12 pagesSensoDuino Turn Your Android Phone Into A Wirelessmarius_danila8736No ratings yet
- BTP Report 1Document46 pagesBTP Report 1mani harshaNo ratings yet
- Arduino Guide using MPU-6050 and nRF24L01Document29 pagesArduino Guide using MPU-6050 and nRF24L01usmanNo ratings yet
- Smart Vacuum Cleaner DIY ProjectDocument17 pagesSmart Vacuum Cleaner DIY ProjectWinata TristanNo ratings yet
- Demo Led Matrix 24x6Document10 pagesDemo Led Matrix 24x6Erix PratamaNo ratings yet
- Smart Home Energy Management System SHEMMSDocument20 pagesSmart Home Energy Management System SHEMMSosadeamos8684No ratings yet
- Acknowledgement: M.Balasubramaniyan, Assistant Professor in Department of Computer Science andDocument75 pagesAcknowledgement: M.Balasubramaniyan, Assistant Professor in Department of Computer Science andAJ VideosNo ratings yet
- ThesisDocument54 pagesThesisSumaira SaifNo ratings yet
- Arduino EMF DetectorDocument11 pagesArduino EMF Detectormarandan96No ratings yet
- Home Automation and Power Monitoring SystemDocument55 pagesHome Automation and Power Monitoring Systemrana hasanNo ratings yet
- Building A Mobile Robot With Optical Tracking and Basic SLAMDocument38 pagesBuilding A Mobile Robot With Optical Tracking and Basic SLAMSwam HtetNo ratings yet
- Sound Activated OutletDocument10 pagesSound Activated OutletGerry Dela CruzNo ratings yet
- Game ServersDocument49 pagesGame ServersChristian ManejeroNo ratings yet
- Final VersionDocument85 pagesFinal VersionlquirozNo ratings yet
- Prototyping Tool DesignDocument112 pagesPrototyping Tool Designict.tronikNo ratings yet
- Drawing RobotDocument9 pagesDrawing Robotmarius_danila8736100% (1)
- Robot Vacuum Cleaner: Joel Bergman and Jonas LindDocument70 pagesRobot Vacuum Cleaner: Joel Bergman and Jonas LindMít Tơ TươiNo ratings yet
- Accelerometer Based Hand Gesture Controlled Robot Using ArduinoDocument42 pagesAccelerometer Based Hand Gesture Controlled Robot Using ArduinoJuthik BVNo ratings yet
- AIDA - CMK - Multi-Algorithm Optimization Kernel Applied To Analog IC Sizing - Ricardo Lourenço (2015)Document71 pagesAIDA - CMK - Multi-Algorithm Optimization Kernel Applied To Analog IC Sizing - Ricardo Lourenço (2015)AdryiusRVitevNo ratings yet
- Optimum Controller Placements in SD-WAN Deployment Case of Ethio Telecom - Adugna GetuDocument103 pagesOptimum Controller Placements in SD-WAN Deployment Case of Ethio Telecom - Adugna GetuMikatechNo ratings yet
- Test 1 LaTeXDocument9 pagesTest 1 LaTeXBenmiloud MarcusNo ratings yet
- Week4 PDFDocument17 pagesWeek4 PDFMridul UpadhyayNo ratings yet
- Control Mobile Robots Simulator GuideDocument17 pagesControl Mobile Robots Simulator GuideMridul UpadhyayNo ratings yet
- Rubiks Cube SolverDocument10 pagesRubiks Cube Solverbrizmar07No ratings yet
- A Solar Tracking Automatic Motorized Window BlindDocument9 pagesA Solar Tracking Automatic Motorized Window BlindMarius DanilaNo ratings yet
- Programming Arduino Next Steps: Going Further with SketchesFrom EverandProgramming Arduino Next Steps: Going Further with SketchesRating: 3 out of 5 stars3/5 (3)
- Laval VirtualDocument3 pagesLaval VirtualPrateek Kumar PandeyNo ratings yet
- Om en A: F in Ite D Iffe Ren Ce-B Ase DN Um Eri Ca L M Eth Od SDocument426 pagesOm en A: F in Ite D Iffe Ren Ce-B Ase DN Um Eri Ca L M Eth Od SPrateek Kumar PandeyNo ratings yet
- Electronics Club Vision & Mission DocumentDocument1 pageElectronics Club Vision & Mission DocumentPrateek Kumar PandeyNo ratings yet
- 445 April 2695Document7 pages445 April 2695Prateek Kumar PandeyNo ratings yet
- Bull Name Is GivenDocument13 pagesBull Name Is GivenPrateek Kumar PandeyNo ratings yet
- Size Reduction Equipment GuideDocument24 pagesSize Reduction Equipment GuidePrateek Kumar Pandey100% (1)
- Homework AssignmentDocument2 pagesHomework AssignmentPrateek Kumar PandeyNo ratings yet
- CoursecontentsDocument3 pagesCoursecontentsPrateek Kumar PandeyNo ratings yet
- BiographyDocument3 pagesBiographyPatricia Anne Nicole CuaresmaNo ratings yet
- WorkbookDocument7 pagesWorkbookᜃᜋᜒᜎ᜔ ᜀᜂᜇᜒᜈᜓ ᜋᜓᜆ᜔ᜑNo ratings yet
- #500 Series Bearings: Lubo Industries, IncDocument25 pages#500 Series Bearings: Lubo Industries, IncmateenNo ratings yet
- Statistics For Biology and Health: M. Gail K. Krickeberg J. M. Samet A. Tsiatis W. WongDocument579 pagesStatistics For Biology and Health: M. Gail K. Krickeberg J. M. Samet A. Tsiatis W. WongViníciusSeixasNo ratings yet
- Tara Apartments-An Oasis in The Real Sense: Private Spaces Tara Group Housing, New Delhi (1978) by Charles CorreaDocument2 pagesTara Apartments-An Oasis in The Real Sense: Private Spaces Tara Group Housing, New Delhi (1978) by Charles CorreaVedant MahadeshwarNo ratings yet
- Wa0016.Document7 pagesWa0016.amjad.khan12133122No ratings yet
- Self-Compacting Concrete: Theoretical and Experimental StudyDocument23 pagesSelf-Compacting Concrete: Theoretical and Experimental StudyPritha DasNo ratings yet
- COTE Y2 V4 by Anime BoiiDocument284 pagesCOTE Y2 V4 by Anime BoiiDog DogNo ratings yet
- Municipal Profile and iWaSH Assessment of MapanasDocument76 pagesMunicipal Profile and iWaSH Assessment of Mapanasmezo magayesNo ratings yet
- D4643Document5 pagesD4643Ruddy EspejoNo ratings yet
- 2018 January Proficiency Session 2 A VersionDocument2 pages2018 January Proficiency Session 2 A VersionUğur GiderNo ratings yet
- HandbookDocument154 pagesHandbookTrisphere Media TechnologiesNo ratings yet
- 9 E.T.H.E.RDocument53 pages9 E.T.H.E.Rjamjam_95678853100% (17)
- UntitledDocument76 pagesUntitledjaiNo ratings yet
- Calibrating Waterjets: An Experiment to Determine Flow RatesDocument5 pagesCalibrating Waterjets: An Experiment to Determine Flow Ratespacoto livingstoneNo ratings yet
- MCQ BSTDocument57 pagesMCQ BSTraj photostateNo ratings yet
- Mathematics F4 Us3Document5 pagesMathematics F4 Us3VERONEJAY MAIKALNo ratings yet
- Avrami 1939 Kinetics of Phase Change. I General TheoryDocument11 pagesAvrami 1939 Kinetics of Phase Change. I General TheoryrobertNo ratings yet
- Excellent Student Achieves High MarksDocument2 pagesExcellent Student Achieves High MarksKhalid MeitaniNo ratings yet
- EOY History Sec 1 2022Document8 pagesEOY History Sec 1 2022SherryNo ratings yet
- Homo Deus PDFDocument14 pagesHomo Deus PDFThaw TarNo ratings yet
- Mid Test. GrammarDocument3 pagesMid Test. GrammarAris Nack TavNo ratings yet
- Development of Science and Technology Throughout HistoryDocument198 pagesDevelopment of Science and Technology Throughout HistoryBenjie GuereroNo ratings yet
- ATEC Smart Brochure - ItalyDocument6 pagesATEC Smart Brochure - ItalyArun Kumar PancharajNo ratings yet
- SAT Practice Test 1 Combined PDFDocument122 pagesSAT Practice Test 1 Combined PDFRay728No ratings yet
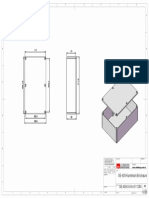
- SE-409 Aluminium Enclosure SE-409-0-0-A-0-11284: RevisionDocument1 pageSE-409 Aluminium Enclosure SE-409-0-0-A-0-11284: RevisionAhmet MehmetNo ratings yet
- 08 - Marian-Avram Vincze, Horatiu-Stefan GrifDocument4 pages08 - Marian-Avram Vincze, Horatiu-Stefan GrifBudiandra Yusuf MahendraNo ratings yet
- GH04.Key Word TransformationDocument6 pagesGH04.Key Word TransformationViệt Hà Nguyễn BùiNo ratings yet
- 9.06&9.01social Psychology JournalDocument17 pages9.06&9.01social Psychology JournalMatthew CheungNo ratings yet
- DhanushDocument2 pagesDhanushAbhishek ANo ratings yet