You might also like
- Design Example of Reinforce Concrete BeamsDocument60 pagesDesign Example of Reinforce Concrete BeamsMario FrankistaNo ratings yet
- 04a Torsion of ThinWalled StructuresDocument35 pages04a Torsion of ThinWalled StructuresYan NingNo ratings yet
- Beams Subject To TorsionDocument47 pagesBeams Subject To Torsionsiti HawaNo ratings yet
- 2) Introduction To WSD, Rectangular BeamsDocument10 pages2) Introduction To WSD, Rectangular BeamsVanessa Rosal PalerNo ratings yet
- Reinforced Concrete Buildings: Behavior and DesignFrom EverandReinforced Concrete Buildings: Behavior and DesignRating: 5 out of 5 stars5/5 (1)
- Behavior and Analysis of Inverted T-Shaped RC Beams Under Shear and Torsion PDFDocument14 pagesBehavior and Analysis of Inverted T-Shaped RC Beams Under Shear and Torsion PDFmfhfhfNo ratings yet
- Warner R.F. - Simplified Analysis of Creep in Prestressed Concrete BeamsDocument9 pagesWarner R.F. - Simplified Analysis of Creep in Prestressed Concrete BeamsCristóbal BerríosNo ratings yet
- 421 Unit 4Document40 pages421 Unit 4Norbert TongeraiNo ratings yet
- Torsion in RC BeamsDocument33 pagesTorsion in RC BeamsMesfin DerbewNo ratings yet
- Ultrapac MSD Tropical 0050 1000 Heatless Adsorption DryerDocument5 pagesUltrapac MSD Tropical 0050 1000 Heatless Adsorption DryerCheivid Enriquez AranoNo ratings yet
- Chapter18 Beam Subjected To Torsion & Bending IIDocument29 pagesChapter18 Beam Subjected To Torsion & Bending IIVincent TengNo ratings yet
- Experience Base - QA/QC StandardsDocument41 pagesExperience Base - QA/QC StandardsRaheel Jibran100% (5)
- 2 Dp2 Prestress Losses FullDocument12 pages2 Dp2 Prestress Losses FullChandeshwor ShahNo ratings yet
- ... Go To Air Volume Calculation Prepared by MD - Zafar ... Go To Strength & Leak TestDocument5 pages... Go To Air Volume Calculation Prepared by MD - Zafar ... Go To Strength & Leak Testmahesh100% (1)
- Ultimate punching shear analysis of slab-column connectionsDocument13 pagesUltimate punching shear analysis of slab-column connectionssamannikNo ratings yet
- Lecture No.7 - BridgeBearings - 2Document33 pagesLecture No.7 - BridgeBearings - 2Riffat Said100% (1)
- TorsionDocument36 pagesTorsiondixn__No ratings yet
- Chapter Five, Torsion of BeamsDocument7 pagesChapter Five, Torsion of BeamsTemesgenAbiyNo ratings yet
- CIV6235 - Shear (MG)Document26 pagesCIV6235 - Shear (MG)friendycalls100% (1)
- Inorganic Chemistry 1 - Lesson 11 (Crystal Lattice and Lattice Energy)Document42 pagesInorganic Chemistry 1 - Lesson 11 (Crystal Lattice and Lattice Energy)bellaseba3_916194545No ratings yet
- 27 TDP Cat Int PriceDocument12 pages27 TDP Cat Int Pricespotty81100% (3)
- FlenderTechnicalHandbook PDFDocument79 pagesFlenderTechnicalHandbook PDFWagner OliveiraNo ratings yet
- Science 10: Behavior of GasesDocument10 pagesScience 10: Behavior of GasesTherese TabasitsitNo ratings yet
- Cyclic Deformation Capacity, Resistance and Effective Stiffness of RC Members With or Without RetrofittingDocument8 pagesCyclic Deformation Capacity, Resistance and Effective Stiffness of RC Members With or Without RetrofittingDave WelchNo ratings yet
- Revisiting Flexural Overstrength in RC Beam and Slab Floor Systems For Seismic Design and EvaluationDocument33 pagesRevisiting Flexural Overstrength in RC Beam and Slab Floor Systems For Seismic Design and EvaluationElena MiceliNo ratings yet
- Effective Stiffness For Structural Analysis of Buildings in EarthquakeDocument8 pagesEffective Stiffness For Structural Analysis of Buildings in EarthquakeNick Darwin Sanchez HuatayNo ratings yet
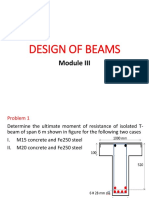
- Design of Beams Module III Problem 1Document18 pagesDesign of Beams Module III Problem 1Amal ZakirNo ratings yet
- 06 DesignAndRetroffitingStrategyOfRCBCJoints PDFDocument0 pages06 DesignAndRetroffitingStrategyOfRCBCJoints PDFmy09No ratings yet
- A Procedure For The Evaluation of Coupling Beam Characteristics of Coupled Shear WallsDocument14 pagesA Procedure For The Evaluation of Coupling Beam Characteristics of Coupled Shear WallskibzeamNo ratings yet
- Mat Chapter 18Document29 pagesMat Chapter 18hemant_durgawaleNo ratings yet
- Chapter 2 STR 4 Torsion in BeamsDocument17 pagesChapter 2 STR 4 Torsion in BeamsAbera MamoNo ratings yet
- Ductility of Prefabricated Cage Reinforced Concrete Beams: Analytical StudyDocument9 pagesDuctility of Prefabricated Cage Reinforced Concrete Beams: Analytical StudymagdyamdbNo ratings yet
- Chapter 2: Design For Shear and TorsionDocument51 pagesChapter 2: Design For Shear and TorsionMunther MohdNo ratings yet
- Construction SequenceDocument6 pagesConstruction SequenceAhmed KhalafNo ratings yet
- Chap.4.torsion DesignDocument45 pagesChap.4.torsion DesignChalachew MesfinNo ratings yet
- CE 308 - Lec 9 - Flexural Analysis and Design of BeamsDocument62 pagesCE 308 - Lec 9 - Flexural Analysis and Design of BeamsAli BajwaNo ratings yet
- Chapter 3( Torsion)Document12 pagesChapter 3( Torsion)znabu asefaNo ratings yet
- Design For shear-LSDDocument11 pagesDesign For shear-LSDAmanuelNo ratings yet
- RC II Chapter 5Document18 pagesRC II Chapter 5Wendimu TolessaNo ratings yet
- TorsionDocument69 pagesTorsionpengniumNo ratings yet
- Ductility Analysis of Prestressed Concrete Beams With Unbonded TendonsDocument9 pagesDuctility Analysis of Prestressed Concrete Beams With Unbonded TendonsvenkatesanjsNo ratings yet
- Seismic Design and Detailing of Exterior Reinforced Concrete Beam-Column JointsDocument12 pagesSeismic Design and Detailing of Exterior Reinforced Concrete Beam-Column JointscurlyjockeyNo ratings yet
- Preliminary Design: 1. SlabDocument5 pagesPreliminary Design: 1. SlabGeorge LazarNo ratings yet
- Example of Hitched Plug DesignDocument9 pagesExample of Hitched Plug DesignRosalyMullisacaValenciaNo ratings yet
- Zhang 2007Document15 pagesZhang 2007Hasanain AlmusawiNo ratings yet
- Introduction To Prestressed Concrete - 1Document15 pagesIntroduction To Prestressed Concrete - 1Deepu SivakumarNo ratings yet
- Comparison of Punching Shear Requirements in Bs8110, Ec2 and MC2010Document42 pagesComparison of Punching Shear Requirements in Bs8110, Ec2 and MC2010Anish KumarNo ratings yet
- 1116 Parra+Moehle2020Document17 pages1116 Parra+Moehle2020UDDOM CHHENGNo ratings yet
- Shear Strength Model of Reinforced Concrete Circular Cross-Section MembersDocument6 pagesShear Strength Model of Reinforced Concrete Circular Cross-Section Membersswathi1717No ratings yet
- Concrete&baseplate PDFDocument18 pagesConcrete&baseplate PDFmitimas2003No ratings yet
- 13 - Cladera Et Al. (2015)Document13 pages13 - Cladera Et Al. (2015)Antonio M. SouzaNo ratings yet
- AASHTO PCI BDM Loss Ex. 9.4 070319Document19 pagesAASHTO PCI BDM Loss Ex. 9.4 070319Syed Muhammad Naeem AhmedNo ratings yet
- Rectangular beam flexure analysisDocument7 pagesRectangular beam flexure analysisLouis LaiNo ratings yet
- Dynamic Push-Over Curve For Building Structures Under 3-Directional Earthquake InputDocument7 pagesDynamic Push-Over Curve For Building Structures Under 3-Directional Earthquake InputNoble Obeng-AnkamahNo ratings yet
- Cyclic Behaviour of A Full Scale RC Structural WallDocument11 pagesCyclic Behaviour of A Full Scale RC Structural WallAzhar PLNo ratings yet
- Chapter - 5 Torsion in Reinforced Concrete MembersDocument8 pagesChapter - 5 Torsion in Reinforced Concrete MembersHelen NegashNo ratings yet
- Shear Design PDFDocument16 pagesShear Design PDFsaman2580No ratings yet
- Basic Concepts, Rectangular and T Beams PDFDocument49 pagesBasic Concepts, Rectangular and T Beams PDFAhmed Hussein KamelNo ratings yet
- The Torsional Restraint of Sandwich Panels ToDocument8 pagesThe Torsional Restraint of Sandwich Panels ToViorel UngureanuNo ratings yet
- Effects of Creep and Shrinkage on Bridge DecksDocument6 pagesEffects of Creep and Shrinkage on Bridge Decksaggrey noahNo ratings yet
- Optimum Shapes On Torsion Behaviour of I-Beam W OpeningDocument8 pagesOptimum Shapes On Torsion Behaviour of I-Beam W Openingangelo_caroneNo ratings yet
- Torsion in Concrete Structures AnalyzedDocument13 pagesTorsion in Concrete Structures AnalyzedIsmail A Ismail100% (1)
- Einforced Oncrete: Bridge Design Manual - 2002 Reinforced ConcreteDocument24 pagesEinforced Oncrete: Bridge Design Manual - 2002 Reinforced ConcretemuradNo ratings yet
- Einforced Oncrete: Bridge Design Manual - 2002 Reinforced ConcreteDocument24 pagesEinforced Oncrete: Bridge Design Manual - 2002 Reinforced Concretetonying86No ratings yet
- Chapter 3Document18 pagesChapter 3gossayeNo ratings yet
- A Comparative Study of Bridge Damage Due To The Wenchuan, Northridge, Loma Prieta and San Fernando EarthquakesDocument17 pagesA Comparative Study of Bridge Damage Due To The Wenchuan, Northridge, Loma Prieta and San Fernando EarthquakesArmen AsatryantsNo ratings yet
- 2009 (Tomazevic) Seismic Upgrading of Old Masonry BuildingsDocument29 pages2009 (Tomazevic) Seismic Upgrading of Old Masonry BuildingsRafael RuizNo ratings yet
- Response Analysis of A Submarine Cable Under Fault MovementDocument19 pagesResponse Analysis of A Submarine Cable Under Fault MovementArmen AsatryantsNo ratings yet
- 10 PDFDocument19 pages10 PDFArmen AsatryantsNo ratings yet
- Module-III Plasma Arc Machining (Pam) :: Modern Manufacturing Processes (Peme 5306)Document7 pagesModule-III Plasma Arc Machining (Pam) :: Modern Manufacturing Processes (Peme 5306)Anonymous dL8dsCncNo ratings yet
- Answers To End-Of-Chapter Questions For Chapter 6, ThermometersDocument2 pagesAnswers To End-Of-Chapter Questions For Chapter 6, ThermometersMencam AsongNo ratings yet
- Massachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceDocument3 pagesMassachusetts Institute of Technology Department of Electrical Engineering and Computer ScienceKrishna GNo ratings yet
- DLL SCIENCE 9 Dec 9-13Document49 pagesDLL SCIENCE 9 Dec 9-13Raiza Lainah MianoNo ratings yet
- Astm A53 Elongation SpecificationDocument3 pagesAstm A53 Elongation SpecificationHéctor AtzinNo ratings yet
- Electronic Factors Determining The Reactivity of Metal SurfacesDocument10 pagesElectronic Factors Determining The Reactivity of Metal SurfacesLuca BrunoNo ratings yet
- Baghdad Design SpectraDocument11 pagesBaghdad Design SpectraAhmed JameelNo ratings yet
- International Journal of Mechanical Sciences: P.A.F. Martins, N. Bay, A.E. Tekkaya, A.G. AtkinsDocument12 pagesInternational Journal of Mechanical Sciences: P.A.F. Martins, N. Bay, A.E. Tekkaya, A.G. Atkins0511018No ratings yet
- Product specifications and energy efficiency ratings for Daikin air conditionersDocument2 pagesProduct specifications and energy efficiency ratings for Daikin air conditionerssloba68No ratings yet
- 003-INT-INSP-CPF1-PP1-BUFFER VESSEL (XX76) - AUG-2022 (REV0.0) - SignedDocument11 pages003-INT-INSP-CPF1-PP1-BUFFER VESSEL (XX76) - AUG-2022 (REV0.0) - SignedVignesh PanchabakesanNo ratings yet
- ECLYPSE TECH File ENG Rev 0.5Document18 pagesECLYPSE TECH File ENG Rev 0.5hassaniNo ratings yet
- 14th World Conference on Earthquake EngineeringDocument8 pages14th World Conference on Earthquake Engineeringryan rakhmat setiadiNo ratings yet
- Earth Sci 1 - Prac 4.1.4Document1 pageEarth Sci 1 - Prac 4.1.4Mireya TorresNo ratings yet
- Adam Fuss-2Document14 pagesAdam Fuss-2api-385683587No ratings yet
- Sec Ii C Sfa-5.22Document36 pagesSec Ii C Sfa-5.22edwinbadajosNo ratings yet
- Early Universe Universe Some Time Later: Astronomy Assessment and TPS Questions: Expansion of The UniverseDocument11 pagesEarly Universe Universe Some Time Later: Astronomy Assessment and TPS Questions: Expansion of The UniversemanaNo ratings yet
- Heat Transfer Enhancement For PCMThermal Energy Storagein Triplex Tube Heat ExchangerDocument31 pagesHeat Transfer Enhancement For PCMThermal Energy Storagein Triplex Tube Heat ExchangerLam DesmondNo ratings yet
- M.tech ThesisDocument69 pagesM.tech ThesisVishwajeet Kumar Jha50% (2)
- Lesson4 Peculiar-Water Copy01of1Document32 pagesLesson4 Peculiar-Water Copy01of1clementinedump0625No ratings yet
- Answers To Saqs: Cambridge International A Level PhysicsDocument2 pagesAnswers To Saqs: Cambridge International A Level PhysicsShameema NasreenNo ratings yet
- Mechanisms of Nucleophilic Substitution ReactionsDocument16 pagesMechanisms of Nucleophilic Substitution ReactionsFachmy Hamdani100% (1)
- TESTING WIRELESS ELECTRO-OSMOSIS FOR BUILDING DEHUMIDIFICATIONDocument6 pagesTESTING WIRELESS ELECTRO-OSMOSIS FOR BUILDING DEHUMIDIFICATIONhyu2123No ratings yet