You might also like
- Geography Cambridge Year 8 CollinsDocument12 pagesGeography Cambridge Year 8 Collinsleandi Jansen van Vuren100% (1)
- Index: Technical Manual Technical ManualDocument22 pagesIndex: Technical Manual Technical ManualBruno MarianoNo ratings yet
- Wastewater Chapter 4Document7 pagesWastewater Chapter 4Matthew BramastaNo ratings yet
- GROUP 10... FinalDocument397 pagesGROUP 10... FinalkeethanNo ratings yet
- Civil Engineering Department Consolidation Test ReportDocument7 pagesCivil Engineering Department Consolidation Test Reportali najatNo ratings yet
- Ministry of Higher Education and Scientific Research: Kirkuk University Civil Engineering Stage - ThreeDocument7 pagesMinistry of Higher Education and Scientific Research: Kirkuk University Civil Engineering Stage - Threeali najatNo ratings yet
- Informe 4 (Datos)Document5 pagesInforme 4 (Datos)Zaira Camila CriolloNo ratings yet
- EXP: Spring Stiffness Test: Experiment GDocument13 pagesEXP: Spring Stiffness Test: Experiment GAditya KoutharapuNo ratings yet
- Ministry of Higher Education and Scientific Research: Kirkuk Civil Engineering Stage - ThreeDocument7 pagesMinistry of Higher Education and Scientific Research: Kirkuk Civil Engineering Stage - Threeali najatNo ratings yet
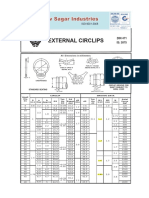
- External CirclipDocument2 pagesExternal CirclipDivyang MistryNo ratings yet
- SlopeDocument2 pagesSlopeARUN RAWATNo ratings yet
- Analysis of Fe by Visible SpectrophotometryDocument1 pageAnalysis of Fe by Visible SpectrophotometryAnnaReyesNo ratings yet
- Larsen & Toubro Limited: ECC Division - EDRCDocument9 pagesLarsen & Toubro Limited: ECC Division - EDRCK Divakara RaoNo ratings yet
- EXAMPLE 4.1 - Batch KineticsDocument15 pagesEXAMPLE 4.1 - Batch KineticsfaninaninaninaNo ratings yet
- Tabela 3 0.5 BarDocument1 pageTabela 3 0.5 BarAna BalbiNo ratings yet
- EII SolutionsDocument5 pagesEII SolutionsRdNo ratings yet
- National Institute of Technology SrinagarDocument14 pagesNational Institute of Technology SrinagarAlex HustleNo ratings yet
- HadomiDocument17 pagesHadomiPedro Canisio Weke SoaresNo ratings yet
- Medidas Experimento 01Document2 pagesMedidas Experimento 01Iago ManancezziNo ratings yet
- Ajuste A Ecuaciones Lineales en ExcelDocument6 pagesAjuste A Ecuaciones Lineales en ExcelJesús HernándezNo ratings yet
- LAMPIRAN Bab 2 PotraitDocument27 pagesLAMPIRAN Bab 2 PotraitYoel LavenkiNo ratings yet
- Superintend by D.foad: Ministry of Higher Education and Scientific ResearchDocument7 pagesSuperintend by D.foad: Ministry of Higher Education and Scientific Researchali najatNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- Drag Force CalculationDocument3 pagesDrag Force CalculationAiman NurNo ratings yet
- SL-T - Sanarya DashtiDocument16 pagesSL-T - Sanarya DashtiPRATEEK SHARMANo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Application of Spread SheetDocument11 pagesApplication of Spread SheetTrushti SanghviNo ratings yet
- SGQQQQQQQWW: Superintend by D.foadDocument7 pagesSGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- 工作簿Document3 pages工作簿saNo ratings yet
- Moles Vs Volumen Moles Vs VolumenDocument12 pagesMoles Vs Volumen Moles Vs VolumenShion SaldañaNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Civil Engineering Consolidation Test ResultsDocument7 pagesCivil Engineering Consolidation Test ResultsAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- GQQQQQQQWW: Superintend by D.foadDocument7 pagesGQQQQQQQWW: Superintend by D.foadAhmed falahNo ratings yet
- Safety ChartDocument5 pagesSafety ChartUnknown MajorsNo ratings yet
- Circular 2Document1 pageCircular 2Unknown MajorsNo ratings yet
- Study Guide To Chapter 16 & OthersDocument3 pagesStudy Guide To Chapter 16 & OthersUnknown MajorsNo ratings yet
- EMSTA3C Steam Plant Tour Substitute Activity - Sem 01 2020Document3 pagesEMSTA3C Steam Plant Tour Substitute Activity - Sem 01 2020Unknown MajorsNo ratings yet
- Condition Monitoring EquipmentDocument1 pageCondition Monitoring EquipmentUnknown MajorsNo ratings yet
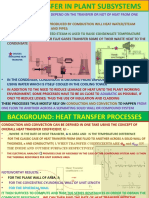
- Heat Exchange in Plant SubsystemsDocument6 pagesHeat Exchange in Plant SubsystemsUnknown MajorsNo ratings yet
- Hydraulic Lec Note 2 - 28oct2021Document44 pagesHydraulic Lec Note 2 - 28oct2021Unknown MajorsNo ratings yet
- Numerical MethodsDocument7 pagesNumerical MethodsUnknown MajorsNo ratings yet
- Construction and Working of Pivoted Motor Bases For Belt DrivesDocument5 pagesConstruction and Working of Pivoted Motor Bases For Belt DrivesPrashant Kumar mishraNo ratings yet
- Study Guides for Science Grade 7Document17 pagesStudy Guides for Science Grade 7Sharon Miguel Clavijo AmarisNo ratings yet
- Introduction to Smart Grid Components and Communication NetworksDocument24 pagesIntroduction to Smart Grid Components and Communication NetworksEswar ChNo ratings yet
- محاضرات هندسة التاكل لفرع العملياتDocument87 pagesمحاضرات هندسة التاكل لفرع العملياتNoor YasserNo ratings yet
- Glentek SMA8115 SMA8215 SMA8315 ManualDocument80 pagesGlentek SMA8115 SMA8215 SMA8315 ManualYaseen JamilNo ratings yet
- FTNV-B FINAL - CatalogueDocument8 pagesFTNV-B FINAL - CatalogueAmodu Usman AdeyinkaNo ratings yet
- 1.CH 211 IntraductionDocument13 pages1.CH 211 IntraductionCarlos BuchwaNo ratings yet
- Nuclear & Particle PhysicsDocument37 pagesNuclear & Particle PhysicsVishal TanwarNo ratings yet
- Manual Quemador pg30-40-50-60 Control Siemens y InterfaseDocument44 pagesManual Quemador pg30-40-50-60 Control Siemens y InterfaseEzequielNo ratings yet
- Est Micro ProjectDocument15 pagesEst Micro ProjectDictator Aditya Acharya0% (1)
- Compact Pressure Switches: Series 9671X/9681X/9692X Series 9671X/9681X/9692XDocument3 pagesCompact Pressure Switches: Series 9671X/9681X/9692X Series 9671X/9681X/9692XsimunNo ratings yet
- Protector Sprinkler HeadsDocument2 pagesProtector Sprinkler HeadsEN ES VH CaliwagNo ratings yet
- Mexico DisasterDocument5 pagesMexico DisasterVaibhav GuliaNo ratings yet
- Title: Topic: Segment: Length: TV Anchor: SCRIPT WRITERS: Corazon Ma. M. Muñoz MelcDocument9 pagesTitle: Topic: Segment: Length: TV Anchor: SCRIPT WRITERS: Corazon Ma. M. Muñoz MelcheartNo ratings yet
- Rotc FinalsDocument215 pagesRotc FinalsAyaseNo ratings yet
- كتالوج جروهى 2022Document800 pagesكتالوج جروهى 2022ali asranNo ratings yet
- Sandblasting Room Operation ManualDocument16 pagesSandblasting Room Operation ManualDui MarianaNo ratings yet
- Ensuring Reliability of Compressor Gas Seals During Long Periods of Pressurized HoldDocument10 pagesEnsuring Reliability of Compressor Gas Seals During Long Periods of Pressurized HoldKader BenNo ratings yet
- System Diagram: 2Az-Fe Engine Control System - Sfi SystemDocument3 pagesSystem Diagram: 2Az-Fe Engine Control System - Sfi SystemdennoNo ratings yet
- Building Utilities Architectural LightingDocument32 pagesBuilding Utilities Architectural LightingED LOUIE LIMNo ratings yet
- Daftar Flash Code Isuzu GigaDocument5 pagesDaftar Flash Code Isuzu GigaRomly MechNo ratings yet
- 20 Years Power Plant GATE, IES & IAS Questions with AnswersDocument48 pages20 Years Power Plant GATE, IES & IAS Questions with Answerselajchet senniNo ratings yet
- Mining Methods 2Document17 pagesMining Methods 2Sandeep PatidarNo ratings yet
- ADC-T2000 Smart Thermostat: User Guide Product ManualDocument11 pagesADC-T2000 Smart Thermostat: User Guide Product ManualRafael RuízNo ratings yet
- Single Aisle Technical Training Manual CMQ A330/A340 To A319/320/321 (IAE V2500/ME) T1 (LVL 2&3) APUDocument232 pagesSingle Aisle Technical Training Manual CMQ A330/A340 To A319/320/321 (IAE V2500/ME) T1 (LVL 2&3) APUjuanNo ratings yet
- Analysis of Power Electronic Converters GuideDocument2 pagesAnalysis of Power Electronic Converters GuideShakeel EngyNo ratings yet
- Fluidsentry Hydraulic Battle Card - CompressedDocument1 pageFluidsentry Hydraulic Battle Card - Compressedரவி குமார்No ratings yet
- SUNICE SL Series】: - Refrigeration Oil for HFC Refrigerant -Document2 pagesSUNICE SL Series】: - Refrigeration Oil for HFC Refrigerant -Gayuh Wahyu Eska NegaraNo ratings yet
- 418000E4422 R0 Write Up On Electro Hydraulic ControllerDocument10 pages418000E4422 R0 Write Up On Electro Hydraulic ControllerkoinsuriNo ratings yet