You might also like
- Coefficient Linear in Two VariablesDocument4 pagesCoefficient Linear in Two VariablesClarisse Bianca CamusNo ratings yet
- Introduction To Differential EquationsDocument6 pagesIntroduction To Differential EquationsLlona Jeramel MarieNo ratings yet
- Module 1Document14 pagesModule 1Madelar, Arc Francis C.No ratings yet
- Elementary Statistics Chapter 5 SummaryDocument42 pagesElementary Statistics Chapter 5 SummaryBusran Salamah TNo ratings yet
- Upang Cea Common Bes025 p3Document69 pagesUpang Cea Common Bes025 p3Jairo OntongNo ratings yet
- Centripetal Acceleration Problems and Solutions PDFDocument1 pageCentripetal Acceleration Problems and Solutions PDFBasic PhysicsNo ratings yet
- Mechanics CH-3 MarkosDocument16 pagesMechanics CH-3 MarkosGadisaNo ratings yet
- Summative 1 ReviewerDocument11 pagesSummative 1 ReviewerJuli BakerNo ratings yet
- Rigid Body Dynamics Lecture HandoutsDocument4 pagesRigid Body Dynamics Lecture HandoutsJaya Mae Mañago0% (1)
- Elementary Surveying With SolutionsDocument22 pagesElementary Surveying With SolutionsNala A.No ratings yet
- Maxima and Minima Chapter SummaryDocument6 pagesMaxima and Minima Chapter SummaryAbdul Halil Abdullah100% (1)
- Forces in SpaceDocument64 pagesForces in SpaceKellie BrownNo ratings yet
- Engineering Economy Module 1Document13 pagesEngineering Economy Module 1Stevenzel Eala EstellaNo ratings yet
- Integral Calculus: Engr. Anacleto M. Cortez JRDocument10 pagesIntegral Calculus: Engr. Anacleto M. Cortez JRPanfilo Diaz LacsonNo ratings yet
- Module 2 - Equilibrium of Rigid BodiesDocument21 pagesModule 2 - Equilibrium of Rigid BodiesJoyce AsisNo ratings yet
- Problem - 3A PDFDocument14 pagesProblem - 3A PDFMonicaNo ratings yet
- CEBU INSTITUTE OF TECHNOLOGY BACHELOR OF SCIENCE IN CIVIL ENGINEERINGDocument2 pagesCEBU INSTITUTE OF TECHNOLOGY BACHELOR OF SCIENCE IN CIVIL ENGINEERINGMae Antonette TabanaoNo ratings yet
- Moment of A ForceDocument14 pagesMoment of A ForceAli MemonNo ratings yet
- Equations of Order One: Differential Equations Module 2ADocument5 pagesEquations of Order One: Differential Equations Module 2AJuvilee RicoNo ratings yet
- Integration TechniqueDocument125 pagesIntegration TechniqueShafi NibrajNo ratings yet
- Flexural Stresses by The Elastic CurveDocument24 pagesFlexural Stresses by The Elastic CurveKristelle Ginez100% (1)
- Calculus concepts and formulasDocument25 pagesCalculus concepts and formulasIan Gabriel P. PaduaNo ratings yet
- DIFFERENTIAL EQUATIONS SOLUTIONSDocument7 pagesDIFFERENTIAL EQUATIONS SOLUTIONSsuby100% (1)
- Coplanar Parallel Force SystemDocument5 pagesCoplanar Parallel Force Systemclarissa ordonoNo ratings yet
- Statics of Rigid Bodies by Ferdinand Singer Solution Manualstatics of Rigid Bodies by Ferdinand Singer Solution Manualstatics of Rigid Bodies by Ferdinand Singer Solution Manualstatics of Rigid BoDocument2 pagesStatics of Rigid Bodies by Ferdinand Singer Solution Manualstatics of Rigid Bodies by Ferdinand Singer Solution Manualstatics of Rigid Bodies by Ferdinand Singer Solution Manualstatics of Rigid Bomarckoewfwfwawawafwaf0% (3)
- Chapter 2 Probability Sample Spaces and EventsDocument5 pagesChapter 2 Probability Sample Spaces and EventsChristopher MabborangNo ratings yet
- Basic Principles, Concepts and DefinitionsDocument27 pagesBasic Principles, Concepts and DefinitionsVincent LagunillaNo ratings yet
- Simple StressDocument43 pagesSimple StressKeith R SimblanteNo ratings yet
- Sample Space and EventsDocument30 pagesSample Space and EventsChina lifeNo ratings yet
- Rectilinear Motion ExplainedDocument22 pagesRectilinear Motion ExplainedJamie MedallaNo ratings yet
- GEOMETRY01Document5 pagesGEOMETRY01Denvi Egipto100% (1)
- Definitions & Examples: C C C CDocument47 pagesDefinitions & Examples: C C C CSeroKeretaMasaroWidiarNo ratings yet
- COSH Module 2 - 2C Workplace Risk Assessment - Synerquest) - CompressedDocument65 pagesCOSH Module 2 - 2C Workplace Risk Assessment - Synerquest) - Compressedalmiraraiza bustamanteNo ratings yet
- Differential EquationsDocument19 pagesDifferential EquationsDinah Jane MartinezNo ratings yet
- Negative secant and tangent between 90 and 180 degreesDocument7 pagesNegative secant and tangent between 90 and 180 degreesKevin Christian Plata100% (1)
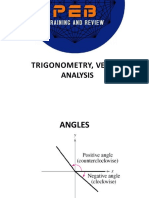
- Trigonometry and Vector AnalysisDocument60 pagesTrigonometry and Vector AnalysisAllen Kyle Sayo100% (1)
- 2 MEC32-1 REVIEW OF MEC30 (Robles)Document16 pages2 MEC32-1 REVIEW OF MEC30 (Robles)John BurnsideNo ratings yet
- Applications of Integration and Fluid PressureDocument13 pagesApplications of Integration and Fluid PressureWala LangNo ratings yet
- Cee Cpe Cee-101 Wata Bacus-JtermDocument132 pagesCee Cpe Cee-101 Wata Bacus-JtermAlexis Mikael EjercitoNo ratings yet
- SURVEYING Lec2 19 20Document13 pagesSURVEYING Lec2 19 20brandonNo ratings yet
- MCQs Earthquakes Chapter 16Document19 pagesMCQs Earthquakes Chapter 16Kristine BarredoNo ratings yet
- Relationship Between Load, Shear, and MomentDocument17 pagesRelationship Between Load, Shear, and MomentEu AumentadoNo ratings yet
- Chapter 3Document25 pagesChapter 3abdullah 3mar abou reashaNo ratings yet
- 3 - Other Applications of DerivativeDocument67 pages3 - Other Applications of DerivativeSean Maverick NobillosNo ratings yet
- Chapter 4 Equilibrium of A Rigid BodyDocument12 pagesChapter 4 Equilibrium of A Rigid BodyWilliam JugalbotNo ratings yet
- ENGINEERING MECHANICS REVIEWDocument4 pagesENGINEERING MECHANICS REVIEWJustine Ejay MoscosaNo ratings yet
- Depreciation Methods for Engineering AssetsDocument10 pagesDepreciation Methods for Engineering AssetsDiane Gutierrez100% (1)
- Force Systems Teaching DemoDocument15 pagesForce Systems Teaching DemoRonwell De LeonNo ratings yet
- Engineering Economy and AccountingDocument143 pagesEngineering Economy and AccountingDan Mitchelle CanoNo ratings yet
- 5 Bending StressDocument23 pages5 Bending Stressmuhamadsaidi100% (1)
- Strength of Materials Module Quizes and ExamDocument193 pagesStrength of Materials Module Quizes and ExamShyra Dela Cruz100% (1)
- D.C. Machin BaidaDocument53 pagesD.C. Machin BaidaLeonard ValdezNo ratings yet
- Discussion of Theories (Experiment 3)Document5 pagesDiscussion of Theories (Experiment 3)MarizNo ratings yet
- CE 111 Class IntroductionDocument41 pagesCE 111 Class IntroductionWild RiftNo ratings yet
- Banking of Highway Curves:: W G V R W V GRDocument10 pagesBanking of Highway Curves:: W G V R W V GRRetro GamerNo ratings yet
- Physics Resultant ForceDocument46 pagesPhysics Resultant ForceTUMICAD, ZAIREN CNo ratings yet
- Resultant Forces in Engineering StructuresDocument44 pagesResultant Forces in Engineering StructuresLesther James CastroNo ratings yet
- Module 2 - Resultant of Force SystemDocument17 pagesModule 2 - Resultant of Force SystemErika SiosanNo ratings yet
- Ce 213-Statics of Rigid Bodies: Fundamental Concepts 1Document10 pagesCe 213-Statics of Rigid Bodies: Fundamental Concepts 1Jexther Pascua NazarNo ratings yet
- CHAPTER 7-Angular MotionDocument15 pagesCHAPTER 7-Angular MotionLesther James CastroNo ratings yet
- Temperature and Heat: Heat Is A Flow of Energy Due To Temperature DifferencesDocument17 pagesTemperature and Heat: Heat Is A Flow of Energy Due To Temperature Differencespaulyn ramosNo ratings yet
- Wave Motion PDFDocument23 pagesWave Motion PDFFRANCES VISAYA100% (1)
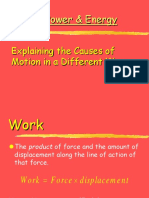
- Work, Energy Power PDFDocument36 pagesWork, Energy Power PDFFRANCES VISAYANo ratings yet
- Physics For Engineers Tah Module PDFDocument15 pagesPhysics For Engineers Tah Module PDFFRANCES VISAYANo ratings yet
- Physics Friction ModuleDocument7 pagesPhysics Friction ModuleFRANCES VISAYANo ratings yet
- Major Report Wood LumberDocument45 pagesMajor Report Wood LumberTorreja JonjiNo ratings yet
- Professional Guide To Water Seepage: Investigation, Diagnosis, Testing & Reporting in Residential BuildingsDocument58 pagesProfessional Guide To Water Seepage: Investigation, Diagnosis, Testing & Reporting in Residential BuildingsRam Gopal PathakNo ratings yet
- Dynamic Modeling of Variable Ballast Tank For Spherical Underwater RobotDocument6 pagesDynamic Modeling of Variable Ballast Tank For Spherical Underwater RobotRaseem VpNo ratings yet
- English ZoneDocument12 pagesEnglish ZoneSuhanto KastaredjaNo ratings yet
- ISO-TR20174 Rev 12-05Document33 pagesISO-TR20174 Rev 12-05Abdeslam EL KAABOUNINo ratings yet
- Cylinder Head: SpecificationsDocument5 pagesCylinder Head: SpecificationsFares100% (1)
- 2019 ACS101 Academic Skills Students MaterialDocument90 pages2019 ACS101 Academic Skills Students MaterialSONAM TSHERING100% (2)
- Body Control System: SectionDocument95 pagesBody Control System: SectionEgoro KapitoNo ratings yet
- Business Aptitude Test: BAT™ Module I - Academic AptitudeDocument18 pagesBusiness Aptitude Test: BAT™ Module I - Academic AptitudePriyam SaraogiNo ratings yet
- BBC Product AdvantagesDocument6 pagesBBC Product Advantagesfomed_twNo ratings yet
- S&W Lab PDFDocument2 pagesS&W Lab PDFiplusNo ratings yet
- Vision IAS CSP21T30S FLT6Document39 pagesVision IAS CSP21T30S FLT6AvanishNo ratings yet
- Project Review: Arun III Hydroelectric Project: Background Location and AccessibilityDocument2 pagesProject Review: Arun III Hydroelectric Project: Background Location and AccessibilitySachin ChakradharNo ratings yet
- Faren Buildcon Plasto ReadyDocument1 pageFaren Buildcon Plasto ReadyFaren TradersNo ratings yet
- EQUIPMENT DATA SHEET Self Propelled Skidding SystemsDocument15 pagesEQUIPMENT DATA SHEET Self Propelled Skidding Systemsmathew1965No ratings yet
- Effects of Financial Problem On Academic Performance: Submitted To: Althea B. OrtizDocument8 pagesEffects of Financial Problem On Academic Performance: Submitted To: Althea B. OrtizSherwin Jay Salanio Solomon25% (4)
- Factory Physics Foundations of Manufacturing Management PDFDocument2 pagesFactory Physics Foundations of Manufacturing Management PDFJayNo ratings yet
- Panasonic CX 491 P Datasheet PDFDocument24 pagesPanasonic CX 491 P Datasheet PDFGanesh MandpeNo ratings yet
- (Atlas Copco) - Industrial Power Tools 2012Document332 pages(Atlas Copco) - Industrial Power Tools 2012mg_catana100% (1)
- Extruded Aluminum Enclosures: 1455 SeriesDocument8 pagesExtruded Aluminum Enclosures: 1455 SeriesYaju JotosNo ratings yet
- Avoiding plagiarism (Автосохраненный)Document15 pagesAvoiding plagiarism (Автосохраненный)muhayyomuhammadamin2023No ratings yet
- 28NM Beol Cu Gap-Fill Challenges For Metal FilmDocument3 pages28NM Beol Cu Gap-Fill Challenges For Metal FilmKwanghoon Ken Kim100% (1)
- Pronuciation - Word Stress ExerciseDocument2 pagesPronuciation - Word Stress ExerciseLan Anh MaiNo ratings yet
- Macbeth PerformanceDocument4 pagesMacbeth Performanceapi-541677543No ratings yet
- WEM 600 - Offshore Platform WeldingDocument26 pagesWEM 600 - Offshore Platform Weldingriqto100% (1)
- Ethical CommunitiesDocument3 pagesEthical CommunitiesAlyssa AzevedoNo ratings yet
- Mumbai Metro Line 3: Cre Site Daily ReportDocument16 pagesMumbai Metro Line 3: Cre Site Daily Reportvansh chauhanNo ratings yet
- Needle Tip Deformation After PDL and Intraseptal Dental Local AnesthesiaDocument5 pagesNeedle Tip Deformation After PDL and Intraseptal Dental Local AnesthesiaMohammad AkheelNo ratings yet
- LogicDocument6 pagesLogicpppppiiiiiNo ratings yet
- Trust 2Document12 pagesTrust 2mochamad sirodjudinNo ratings yet