You might also like
- Energy Autonomy of Batteryless and Wireless Embedded Systems: Aeronautical ApplicationsFrom EverandEnergy Autonomy of Batteryless and Wireless Embedded Systems: Aeronautical ApplicationsNo ratings yet
- Super Final ThesisDocument72 pagesSuper Final ThesisRiyhad F. TamayoNo ratings yet
- Document 256Document2 pagesDocument 256Chenchu AravindNo ratings yet
- My Pro 7Document7 pagesMy Pro 7ToheebdareNo ratings yet
- Final Project Report of LabDocument7 pagesFinal Project Report of LabDuniya ANo ratings yet
- Automatic Speed Control and Turning ON/OFF For Smart Fan by Temperature and Ultrasonic SensorDocument7 pagesAutomatic Speed Control and Turning ON/OFF For Smart Fan by Temperature and Ultrasonic SensorEzekiel Dela PenaNo ratings yet
- Fan Speed Control With Temperature SensorsDocument9 pagesFan Speed Control With Temperature Sensorskarina abyysNo ratings yet
- Development of Automatic Mini Fan With Human Detector by Using PIR SensorDocument8 pagesDevelopment of Automatic Mini Fan With Human Detector by Using PIR SensorToheebdareNo ratings yet
- Title:-Automatic Room Light Control Using MicrocontrollerDocument26 pagesTitle:-Automatic Room Light Control Using MicrocontrollerTariku MehdiNo ratings yet
- Developmental Automatic Electric Fan With Motion Detector Powered by Solar PanelDocument5 pagesDevelopmental Automatic Electric Fan With Motion Detector Powered by Solar PanelHazent Kint DemolNo ratings yet
- Automatic Power Supply Based Fan Control SystemDocument2 pagesAutomatic Power Supply Based Fan Control SystemkannanchammyNo ratings yet
- CH 1Document4 pagesCH 1hsushweyi tint28No ratings yet
- Construction of An Intelligent and Efficient Light Control SystemDocument10 pagesConstruction of An Intelligent and Efficient Light Control SystemTJPRC PublicationsNo ratings yet
- 26 Article - Text 27 1 10 2019102520191030 58593 1hrobox With Cover Page v2Document8 pages26 Article - Text 27 1 10 2019102520191030 58593 1hrobox With Cover Page v2Fitrah Huseini AziziNo ratings yet
- BE Project SynopsisDocument17 pagesBE Project SynopsisAnkitaNo ratings yet
- Proposal Submit12Document9 pagesProposal Submit12syabseeshoesNo ratings yet
- (IJCST-V6I5P12) :Karthikeyan.R.A, Saran Sriram.K, Piyush.DDocument3 pages(IJCST-V6I5P12) :Karthikeyan.R.A, Saran Sriram.K, Piyush.DEighthSenseGroupNo ratings yet
- Cho 2019 IOP Conf. Ser. Earth Environ. Sci. 342 012006 PDFDocument7 pagesCho 2019 IOP Conf. Ser. Earth Environ. Sci. 342 012006 PDFMed AmiranoNo ratings yet
- Temperature Based Speed Control of Fan Using Arduino: April 2019Document7 pagesTemperature Based Speed Control of Fan Using Arduino: April 2019benjaCR TubeNo ratings yet
- Ijirt147629 PaperDocument7 pagesIjirt147629 Papervamshidonthi38920181No ratings yet
- Informe Control InglesDocument29 pagesInforme Control InglesMarcelo QuispeNo ratings yet
- Smart Light Using ArduinoDocument45 pagesSmart Light Using Arduinosudimar.supian.11No ratings yet
- Fan ElectDocument34 pagesFan ElectSeye Kareem100% (1)
- A Smart Garden System With A Dual-Axis Solar Tracker: June 2020Document9 pagesA Smart Garden System With A Dual-Axis Solar Tracker: June 2020Jawad Ul Hassan ShahNo ratings yet
- Construction of A Temperature ControlledDocument5 pagesConstruction of A Temperature ControlledcabdimaalikscmNo ratings yet
- Implementation of An Energy Monitoring System Based On ArduinoDocument6 pagesImplementation of An Energy Monitoring System Based On Arduinoprabhu rachutiNo ratings yet
- 1 Online PDFDocument6 pages1 Online PDFT K MUHAMMAD YaseenNo ratings yet
- A Review On Greenhouse Environment Controlling RobotDocument4 pagesA Review On Greenhouse Environment Controlling RobotIRJMETS JOURNALNo ratings yet
- Chapter 1: ABOUT PROJECT: Solar Based Auto-Irrigation System Using ArduinoDocument3 pagesChapter 1: ABOUT PROJECT: Solar Based Auto-Irrigation System Using ArduinoMohammad YasirNo ratings yet
- Irjet V5i10259Document3 pagesIrjet V5i10259Adarsh NayakNo ratings yet
- PK Synopsys MTechDocument19 pagesPK Synopsys MTechkyle M HallNo ratings yet
- INTRODUCTION (For Improvement)Document5 pagesINTRODUCTION (For Improvement)Cesar VargasNo ratings yet
- Energy Saving Solution Using IoTDocument8 pagesEnergy Saving Solution Using IoTIJRASETPublicationsNo ratings yet
- 70 1470383842 - 05-08-2016 PDFDocument6 pages70 1470383842 - 05-08-2016 PDFEditor IJRITCCNo ratings yet
- Ijmet 09 09 142Document9 pagesIjmet 09 09 142KaleemNo ratings yet
- FamiDocument17 pagesFamiCherinet GashawNo ratings yet
- Arduino Based Led Street Light Auto Intensity Control SystemDocument5 pagesArduino Based Led Street Light Auto Intensity Control SystemSouvik PatraNo ratings yet
- Construction of An Automatic Power Switch Using Infrared Motion SensorDocument7 pagesConstruction of An Automatic Power Switch Using Infrared Motion Sensorparthesanved5689No ratings yet
- SSRN Id3645400Document6 pagesSSRN Id3645400sjama095No ratings yet
- Mini ProjectDocument17 pagesMini ProjectGajab BezzzatiNo ratings yet
- Design and Implementation of Automatic RDocument7 pagesDesign and Implementation of Automatic RcabdimaalikscmNo ratings yet
- Universal Fan and Light Remote ControlledDocument50 pagesUniversal Fan and Light Remote ControlledJhay R PerjesNo ratings yet
- Review of Various Technology Automatic Dimming Control of LED Street LightDocument5 pagesReview of Various Technology Automatic Dimming Control of LED Street LightIJRASETPublicationsNo ratings yet
- Research Ch.2Document11 pagesResearch Ch.2jovenni coNo ratings yet
- Chapter Five Conclusions and RecommendationsDocument3 pagesChapter Five Conclusions and RecommendationsSixtus OkoroNo ratings yet
- AI Based Smart High Way With Green Energy Resources Using IoT DevicesDocument10 pagesAI Based Smart High Way With Green Energy Resources Using IoT DevicesIJRASETPublicationsNo ratings yet
- Project ThesisDocument54 pagesProject ThesisIrelyn100% (1)
- To Study The Effect On The Application of Occupancy Sensor On Lighting System in ClassroomDocument12 pagesTo Study The Effect On The Application of Occupancy Sensor On Lighting System in ClassroomEar RulNo ratings yet
- A Review of Automatic Irradiation Adjustment Based LED Street Light With Vehicle Movement DetectionDocument5 pagesA Review of Automatic Irradiation Adjustment Based LED Street Light With Vehicle Movement DetectionIJRASETPublicationsNo ratings yet
- PPTXDocument19 pagesPPTXVasanthNo ratings yet
- INstrumentation Project SamadhanDocument14 pagesINstrumentation Project SamadhanDanny SureshNo ratings yet
- Term Paper Street LightDocument3 pagesTerm Paper Street Lightjigyasa BhardwajNo ratings yet
- Buildings of The FutureDocument10 pagesBuildings of The FutureSanjeet ChoudharyNo ratings yet
- Intelligent Power Saving SystemDocument5 pagesIntelligent Power Saving SystemSivagami AmmuNo ratings yet
- Iot Based Low Cost Smart Ambu-Bag Compressing Machine For Low Cost VentilatorsDocument6 pagesIot Based Low Cost Smart Ambu-Bag Compressing Machine For Low Cost Ventilatorshamed razaNo ratings yet
- Adaptive LED DimmingDocument11 pagesAdaptive LED DimmingkrashanxNo ratings yet
- Automatic Room Light System For Power Saving: September 2019Document4 pagesAutomatic Room Light System For Power Saving: September 2019candyNo ratings yet
- Automatic Fan Speed Controlled Laptop Cooling Pad System Using MicrocontrollerDocument7 pagesAutomatic Fan Speed Controlled Laptop Cooling Pad System Using Microcontrollervajor54592No ratings yet
- Fin Irjmets1652953856Document4 pagesFin Irjmets1652953856AliNo ratings yet
- 1026-Article Text-4814-1-10-20210714Document8 pages1026-Article Text-4814-1-10-20210714Grace HasibuanNo ratings yet
- Naval Price ListDocument4 pagesNaval Price ListSimion Cosmin AurelianNo ratings yet
- 6931 PracticalExperience FH 20191021 WebDocument13 pages6931 PracticalExperience FH 20191021 WebLuisEspinozaNo ratings yet
- EMFW OBE Assignment Summer 20Document3 pagesEMFW OBE Assignment Summer 20saikat ghoshNo ratings yet
- Feedback Amplifiers - ECE Tutorials PDFDocument4 pagesFeedback Amplifiers - ECE Tutorials PDFAzim WarNo ratings yet
- Alternating Current Previous Eapcet Physics - QPDocument18 pagesAlternating Current Previous Eapcet Physics - QPRama Mohana Rao BhandaruNo ratings yet
- Emf NewDocument12 pagesEmf Newrajendra amaravathiNo ratings yet
- Lect 5 Sub-Transmission LinesDocument33 pagesLect 5 Sub-Transmission LinesMohammad Haseeb ButtNo ratings yet
- 参量混频双光梳信道化接收机Document9 pages参量混频双光梳信道化接收机Gosoviet XINGNo ratings yet
- Cne Micro Project ReportDocument16 pagesCne Micro Project Reportsurajkapse514No ratings yet
- Simple LiFi Circuit For School and College ProjectDocument6 pagesSimple LiFi Circuit For School and College ProjectPramillaNo ratings yet
- Comet New Gland Selection ChartDocument10 pagesComet New Gland Selection Chartabhi05019175% (4)
- Exam 4 Set CDocument4 pagesExam 4 Set Cmarktaborete0No ratings yet
- Operating Instructions Liquisys M COM223/253: Transmitter For Dissolved OxygenDocument116 pagesOperating Instructions Liquisys M COM223/253: Transmitter For Dissolved OxygenHectorNo ratings yet
- Eng. Mohamed Abdel Hameid AhmedDocument33 pagesEng. Mohamed Abdel Hameid AhmedMohamed A. AhmedNo ratings yet
- Computer Monitor RepairDocument47 pagesComputer Monitor Repairrezu_dhaka0% (1)
- Chapter 3 Bipolar Junction Transistor BJT (Cont.)Document14 pagesChapter 3 Bipolar Junction Transistor BJT (Cont.)AyeshaNo ratings yet
- Curso Simocode Completo 030810 PDFDocument124 pagesCurso Simocode Completo 030810 PDFHerickson Andrew PereiraNo ratings yet
- PowerFactory 2021 Product SpecificationDocument14 pagesPowerFactory 2021 Product SpecificationGianfranco Pasqua IndianoNo ratings yet
- Service Manual: SA-WX900Document16 pagesService Manual: SA-WX900jpcmansoNo ratings yet
- Handler 187 and H100S2-10 Gun Owner's ManualDocument52 pagesHandler 187 and H100S2-10 Gun Owner's ManualHobart Welding ProductsNo ratings yet
- UnicalDocument4 pagesUnicalAan StiawanNo ratings yet
- Pt2399 DataDocument6 pagesPt2399 DataHans GraudalNo ratings yet
- Portable Green Energy Charging StationDocument26 pagesPortable Green Energy Charging StationVinay SaiNo ratings yet
- Circuit Breaker MaintenanceDocument15 pagesCircuit Breaker MaintenanceJoyson Pereira100% (1)
- Irfps 3810 PBFDocument8 pagesIrfps 3810 PBFCrisan Radu-HoreaNo ratings yet
- Hoymile M1500 User ManualDocument32 pagesHoymile M1500 User ManualAhmad Shuja ChughtaiNo ratings yet
- SIEMENS 04 Modelling The Use of Selective Main Miniature Circuit-BreakersDocument9 pagesSIEMENS 04 Modelling The Use of Selective Main Miniature Circuit-BreakersShailesh ChettyNo ratings yet
- Rectilinear Displacement Transducer: Technical Data Mechanical DimensionsDocument2 pagesRectilinear Displacement Transducer: Technical Data Mechanical DimensionsJan MaksNo ratings yet
- Apxvbb20x2 - 43 C I20Document4 pagesApxvbb20x2 - 43 C I20ana camila escobar0% (1)
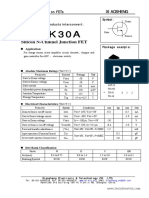
- K30a PDFDocument1 pageK30a PDFVictorManuelBernalBlancoNo ratings yet