You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Electromagnetic TransientsDocument13 pagesElectromagnetic TransientsMarcoPalmarolaNo ratings yet
- KIE 4004 Modern Power System AnalysisDocument13 pagesKIE 4004 Modern Power System AnalysisOmarRagabNo ratings yet
- Ernst Psce 2009 TalkDocument19 pagesErnst Psce 2009 TalkadauNo ratings yet
- Stability Analysis of Power System Interms of Load CurtailmentDocument6 pagesStability Analysis of Power System Interms of Load CurtailmentLethargic AzadhirachtaNo ratings yet
- Funnab Dr. Mathew EditedDocument30 pagesFunnab Dr. Mathew EditedATILOLA SILASNo ratings yet
- Frangieh, 2015Document6 pagesFrangieh, 2015EdsonNo ratings yet
- Swing EquationDocument6 pagesSwing EquationVaibhav kumbhar100% (1)
- Evaluation of Power System Transient Stability and Definition of The Basic Criterion PDFDocument8 pagesEvaluation of Power System Transient Stability and Definition of The Basic Criterion PDFostojic007No ratings yet
- Power System StabilityDocument20 pagesPower System Stabilitynoor100% (3)
- Electrical FundamentalsDocument217 pagesElectrical Fundamentalskisan singhNo ratings yet
- Power Quality and The Need For Compensation: International Journal of Recent Development in Engineering and TechnologyDocument6 pagesPower Quality and The Need For Compensation: International Journal of Recent Development in Engineering and TechnologyDeepak DasNo ratings yet
- Paper 2Document5 pagesPaper 2electrician.powersystemsNo ratings yet
- Solid State TranformerDocument25 pagesSolid State TranformerMayur ShimpiNo ratings yet
- What Is Facts?Document36 pagesWhat Is Facts?TahirAbbasNo ratings yet
- Transient Stability: Stability Analysis of Nonlinear Systems (Eeen50100)Document72 pagesTransient Stability: Stability Analysis of Nonlinear Systems (Eeen50100)Hélio Oliveira FerrariNo ratings yet
- ESBI White Paper Delayed Zero Crossings Following Short Circuit PDFDocument6 pagesESBI White Paper Delayed Zero Crossings Following Short Circuit PDFbgojkovic13No ratings yet
- Solid State Tranformer EEDocument27 pagesSolid State Tranformer EEMayur ShimpiNo ratings yet
- Transformer Inrush Current and Related Challenges: International Journal of Emerging Technology and Advanced EngineeringDocument3 pagesTransformer Inrush Current and Related Challenges: International Journal of Emerging Technology and Advanced EngineeringHukmran HussainNo ratings yet
- MATLAB-Based Transient Stability Analysis of A Power SystemDocument34 pagesMATLAB-Based Transient Stability Analysis of A Power Systemsamarahmad2008479875% (4)
- Electrical FundamentalsDocument214 pagesElectrical FundamentalsShaheen Farooq50% (2)
- Control of Power System OscillationsDocument9 pagesControl of Power System OscillationsgabriveragNo ratings yet
- The Bulk Power Supply 2. Reliability Criteria: The 2 Components Security Assessment From Operators View NercDocument38 pagesThe Bulk Power Supply 2. Reliability Criteria: The 2 Components Security Assessment From Operators View NercTana AzeezNo ratings yet
- Reactive Power ControlDocument183 pagesReactive Power ControlAmberMeerabNo ratings yet
- Power System Stability-Chapter 3Document84 pagesPower System Stability-Chapter 3Du TrầnNo ratings yet
- Predicting Behavior of Induction Motors During Electrical Service Faults and Momentary Voltage InterruptionsDocument7 pagesPredicting Behavior of Induction Motors During Electrical Service Faults and Momentary Voltage InterruptionsnadalllabeedNo ratings yet
- EEU801 Power System Stability: Dr. Kawita D. Thakur Government College of Engineering, AmravatiDocument20 pagesEEU801 Power System Stability: Dr. Kawita D. Thakur Government College of Engineering, AmravatiSominath HarneNo ratings yet
- Relay CoordinationDocument30 pagesRelay CoordinationMohamed MeeranNo ratings yet
- Power Quality and FACTDocument100 pagesPower Quality and FACTvineetchoudhary1269No ratings yet
- Numerical Method Based Single Machine Analysis For Transient StabilityDocument6 pagesNumerical Method Based Single Machine Analysis For Transient StabilityAlberto ManhuaNo ratings yet
- International Solar Alliance Expert Training Course Solar PV InvertersDocument36 pagesInternational Solar Alliance Expert Training Course Solar PV InvertersABCDeNo ratings yet
- Emeng 3131 Electrical Power Systems: Power System Transients, Power System Stability & Load Flow StudiesDocument25 pagesEmeng 3131 Electrical Power Systems: Power System Transients, Power System Stability & Load Flow StudiesmichaelNo ratings yet
- Space Vector Analysis in Electrical Drives For Single-Phase Induction Motor Using Matlab/SimulinkDocument10 pagesSpace Vector Analysis in Electrical Drives For Single-Phase Induction Motor Using Matlab/Simulinklojain centerNo ratings yet
- Solution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemDocument6 pagesSolution of Swing Equation For Transient Stability Analysis in Dual-Machine SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Power System Stability On Island Networks: Digsilent GMBHDocument36 pagesPower System Stability On Island Networks: Digsilent GMBHawan_krNo ratings yet
- Review of Load Frequency Control Methods, Part-I: Introduction and Pre-Deregulation ScenarioDocument6 pagesReview of Load Frequency Control Methods, Part-I: Introduction and Pre-Deregulation ScenarioislammuddinNo ratings yet
- UNIT-7 & 8 Transient Stability StudiesDocument35 pagesUNIT-7 & 8 Transient Stability StudiesVishalSinghNo ratings yet
- Distance Protection During Asymmetrical Power Swings: Challenges and SolutionsDocument10 pagesDistance Protection During Asymmetrical Power Swings: Challenges and SolutionsRahul SawantNo ratings yet
- Distribution System ModelsDocument21 pagesDistribution System Modelsrobert1234567m100% (1)
- Behavior of Induction Motor Due To Voltage Sags and Short InterruptionsDocument7 pagesBehavior of Induction Motor Due To Voltage Sags and Short InterruptionsrafaelantoniomolinaNo ratings yet
- Power System StabilityDocument68 pagesPower System StabilitySarah Frazier100% (3)
- HVDC - Pat 2 - AnswwersDocument27 pagesHVDC - Pat 2 - AnswwersFundayyy moviesNo ratings yet
- Chapter 12Document23 pagesChapter 12sachin235No ratings yet
- Anderson ADocument11 pagesAnderson Acrisis_zNo ratings yet
- Power System Stabliity Using Power World SimulatorDocument24 pagesPower System Stabliity Using Power World SimulatorfaizanNo ratings yet
- Transient Stability Analysis With PowerWorld SimulatorDocument32 pagesTransient Stability Analysis With PowerWorld SimulatorvitaxeNo ratings yet
- Lyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source ConvertersDocument13 pagesLyapunov-Based Control For Three-Phase PWM AC DC Voltage-Source Converterssachin kumarNo ratings yet
- Consideration of Magnetizing Inrush Current Characteristics For Transformer Protection - 190510Document8 pagesConsideration of Magnetizing Inrush Current Characteristics For Transformer Protection - 190510p m yadavNo ratings yet
- Practical Considerations For Transformer Inrush InhibitDocument5 pagesPractical Considerations For Transformer Inrush Inhibitbaskaranjay5502No ratings yet
- Main ProjectDocument25 pagesMain Project_imsandeepNo ratings yet
- Power Quality Lab Manual (EE-801)Document12 pagesPower Quality Lab Manual (EE-801)ASHU KNo ratings yet
- Enhancement of Power Quality Using DstatcomDocument51 pagesEnhancement of Power Quality Using DstatcomKeerthi Ambati50% (2)
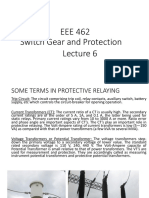
- Lecture 06 - Protective Relay PDFDocument25 pagesLecture 06 - Protective Relay PDFEmdadul Hoq Rakib100% (1)
- Controle of Single Phase InvetereDocument6 pagesControle of Single Phase InvetereNasirUddinNo ratings yet
- Wind Power 2008Document11 pagesWind Power 2008Dimas_pradethaNo ratings yet
- DR Ashok SDocument137 pagesDR Ashok SRama KrishnaNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- c300b3fa-a7b0-4208-9ab7-dedb183f0559 (1)Document112 pagesc300b3fa-a7b0-4208-9ab7-dedb183f0559 (1)SalimNo ratings yet
- Jovanscha Qisty Adinda Fa: Personal History Career HistoryDocument1 pageJovanscha Qisty Adinda Fa: Personal History Career HistoryJovanscha QistyNo ratings yet
- Free Mechanical Aptitude Questions AnswersDocument12 pagesFree Mechanical Aptitude Questions Answerswhriyj177No ratings yet
- Amperometric Titrations: Principle, Instrumentation and ApplicationsDocument6 pagesAmperometric Titrations: Principle, Instrumentation and ApplicationsNandhanNo ratings yet
- Innovation Health and Wealth Report 2012dh - 134597Document36 pagesInnovation Health and Wealth Report 2012dh - 134597Alejandro CardonaNo ratings yet
- Mark Scheme (Results) January 2020: Pearson Edexcel International GCSE in Physics (4PH1) Paper 2PDocument12 pagesMark Scheme (Results) January 2020: Pearson Edexcel International GCSE in Physics (4PH1) Paper 2PNairit80% (5)
- The System by Todd Valentine - Review & Summary - Power Dynamics™ PDFDocument33 pagesThe System by Todd Valentine - Review & Summary - Power Dynamics™ PDFshadowzack 509No ratings yet
- Design of Saddle Support For Horizontal Pressure Vessel PDFDocument5 pagesDesign of Saddle Support For Horizontal Pressure Vessel PDFnizam1372100% (3)
- Brochure (Pdf/Brochure - PDF) : Student RegistrationDocument3 pagesBrochure (Pdf/Brochure - PDF) : Student Registrationanurag vermaNo ratings yet
- ACR-School SHARE and General AssemblyDocument9 pagesACR-School SHARE and General AssemblyARACELI VICERANo ratings yet
- Calculating Flow Through An Orifice Using ASME MFC-3M-1989 and Irrecoverable Pressure Drop EquationsDocument5 pagesCalculating Flow Through An Orifice Using ASME MFC-3M-1989 and Irrecoverable Pressure Drop EquationsRaphael212219No ratings yet
- Vitamin A Deficiency Disorders VADDDocument232 pagesVitamin A Deficiency Disorders VADDAnonymous NQMP1x04t2No ratings yet
- KepemimpinanDocument11 pagesKepemimpinanAditio PratamNo ratings yet
- Delegation of Authority Lecture Principles of ManagementDocument34 pagesDelegation of Authority Lecture Principles of Management2021-SC040 PRANAYSAKHARAMDHANDENo ratings yet
- Radar Systems Engineering - MATLAB & SimulinkDocument2 pagesRadar Systems Engineering - MATLAB & SimulinkAdfgatLjsdcolqwdhjpNo ratings yet
- Lesson 6 - Marketing Micro and Macro-EnvironmentDocument13 pagesLesson 6 - Marketing Micro and Macro-EnvironmentEgotharsisNo ratings yet
- English 7 ASDocument16 pagesEnglish 7 ASAh RingNo ratings yet
- MT409 Business Communication: Dr. Rohit Pandey Department of Management, B.I.T MesraDocument106 pagesMT409 Business Communication: Dr. Rohit Pandey Department of Management, B.I.T MesraMilind BhaskarNo ratings yet
- Lecture Notes. Mathematics in The Modern WorldDocument4 pagesLecture Notes. Mathematics in The Modern WorldEmmanuelle Kate Magpayo - 1ANo ratings yet
- Automatic Design of Compliant Surgical Forceps With Adaptive Grasping FunctionsDocument9 pagesAutomatic Design of Compliant Surgical Forceps With Adaptive Grasping FunctionsFarjad KhanNo ratings yet
- DLL - Mathematics 6 - Q1 - W4Document7 pagesDLL - Mathematics 6 - Q1 - W4MARIDOR BUENONo ratings yet
- Exercise 7 Mineral Oil EmulsionDocument3 pagesExercise 7 Mineral Oil EmulsionFreya AvellanoNo ratings yet
- Living in A Dream WorldDocument8 pagesLiving in A Dream WorldTrọng Nguyễn DuyNo ratings yet
- Resonance UnlockedDocument5 pagesResonance UnlockedgjjgNo ratings yet
- Ahmad Faizal Bin Ahmad Zahari (Resume)Document15 pagesAhmad Faizal Bin Ahmad Zahari (Resume)ahmad faizalNo ratings yet
- Analysis of The Story The AwakeningDocument7 pagesAnalysis of The Story The AwakeningAary Rathod100% (1)
- The Ifa Concept of EleniniDocument14 pagesThe Ifa Concept of Eleniniifakoya178% (9)
- OHS Learner Guide - V1Document30 pagesOHS Learner Guide - V1Education 2.0No ratings yet
- The Strange Life of Nikola TeslaDocument8 pagesThe Strange Life of Nikola TeslaMohammad MetlejNo ratings yet
- System Learning Plan Preparation: Krislizz International AcademyDocument11 pagesSystem Learning Plan Preparation: Krislizz International AcademyQhutie Little CatNo ratings yet