You might also like
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlRating: 5 out of 5 stars5/5 (1)
- Dynamic Analysis of Direct Current Machines Under Voltage and Load ChangesDocument16 pagesDynamic Analysis of Direct Current Machines Under Voltage and Load ChangeselimadiNo ratings yet
- EEE3001 Lab ManualDocument66 pagesEEE3001 Lab ManualReshab Sahoo100% (1)
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungNo ratings yet
- Amca05073 PDFDocument6 pagesAmca05073 PDFEmil EneNo ratings yet
- Power System Dynamic ModelingDocument12 pagesPower System Dynamic ModelingSyed Muhammad Munavvar HussainNo ratings yet
- QUBE-Servo 2 First Principles Modeling Workbook (Student)Document6 pagesQUBE-Servo 2 First Principles Modeling Workbook (Student)Albert ForeroNo ratings yet
- Mathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkDocument6 pagesMathematical Modeling of Open Loop PMDC Motor Using Matlab/SimulinkSharath KumarNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- ECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Document9 pagesECE330 Power Circuits and Electromechanics: Dr. Nam Nguyen-Quang Fall 2016Tran Nguyen KhangNo ratings yet
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocument5 pagesExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNo ratings yet
- Reduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationDocument13 pagesReduction of Torque Ripple in DTC For Induction Motor Using Input-Output Feedback LinearizationRajendra KumarNo ratings yet
- DTrends Feb 2011Document14 pagesDTrends Feb 2011Rui AllenNo ratings yet
- RELAY COORDINATION USING ETAP Ijariie12420Document9 pagesRELAY COORDINATION USING ETAP Ijariie12420Rakesh ShinganeNo ratings yet
- Simulation of Electric Machines and Drive Systems Using Matlab and SimulinkDocument11 pagesSimulation of Electric Machines and Drive Systems Using Matlab and SimulinkmdpkishoreNo ratings yet
- 3 Lab 3: DC Motor Transfer Function Estimation by Explicit MeasurementDocument9 pages3 Lab 3: DC Motor Transfer Function Estimation by Explicit MeasurementRogger MezaNo ratings yet
- Evaluation of Induction MachinesDocument47 pagesEvaluation of Induction MachinesAshwani RanaNo ratings yet
- Modelling and Simulation of Synchronous Machine TRDocument11 pagesModelling and Simulation of Synchronous Machine TRManuelSosaNo ratings yet
- PSAD Slides Lec1 Synchronous Machine ModelDocument56 pagesPSAD Slides Lec1 Synchronous Machine ModelMin Khine KyawNo ratings yet
- Closed-Loop Hybrid Direct Torque Control For Medium Voltage Induction Motor Drive For Performance ImprovementDocument10 pagesClosed-Loop Hybrid Direct Torque Control For Medium Voltage Induction Motor Drive For Performance ImprovementMuhammad UmarNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNo ratings yet
- Cambio de FrecuenciaDocument20 pagesCambio de FrecuenciaDarness Castillo RodriguezNo ratings yet
- Twin Rotor Mimo System: Experiment No: 5Document8 pagesTwin Rotor Mimo System: Experiment No: 5sameer sultanNo ratings yet
- Exercises On Relay Settings - MemoDocument7 pagesExercises On Relay Settings - Memomoses kakwenaNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFasifNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFABDULLAHNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFVijay PNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideR Siva KumaranNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFJuniorNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFPankajDhobleNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideEduardo LópezNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideMULAGONDLA DINESH REDDYNo ratings yet
- Damping: A Guide To Linear Dynamic Analysis WithDocument14 pagesDamping: A Guide To Linear Dynamic Analysis WithThyaga RajNo ratings yet
- Dynamics PDFDocument14 pagesDynamics PDFDiksith WilliamNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideKumar NishantNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFhjklmlkNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis Guidemirza_munir_baig995No ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis Guidesfrancois21100% (1)
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFDiksith WilliamNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuiderihabNo ratings yet
- AC DC FormulasDocument9 pagesAC DC FormulasJay Mark BalaneNo ratings yet
- Working Principles Need of Dynamic Modeling and Accurate Control of Motor Drives Dynamic Modeling of DC Machine Control of DC MachineDocument23 pagesWorking Principles Need of Dynamic Modeling and Accurate Control of Motor Drives Dynamic Modeling of DC Machine Control of DC MachineAli ZahidNo ratings yet
- Chapter 8 - SynchronousDocument12 pagesChapter 8 - SynchronousLin ChongNo ratings yet
- Icems 2019 8921951Document5 pagesIcems 2019 8921951Amir NazirNo ratings yet
- Operation Characteristics Improvement of Linear Synchronous Motor With Half-Wave Rectified Self ExcitationDocument4 pagesOperation Characteristics Improvement of Linear Synchronous Motor With Half-Wave Rectified Self ExcitationHuong ThaoNo ratings yet
- Power System Analysis: Fault Analysis Tom Overbye and Ross BaldickDocument35 pagesPower System Analysis: Fault Analysis Tom Overbye and Ross Baldicka_r_vijayanand6550No ratings yet
- Paper 6Document4 pagesPaper 6Aisha ShaikhNo ratings yet
- Lab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIIDocument12 pagesLab Manual: Control Systems Design and Analysis: Using The Quanser Controls Board For NI ELVIS IIImishtinilNo ratings yet
- Analysis of Electrical Machines BankDocument66 pagesAnalysis of Electrical Machines BankChilambarasan MadhappanNo ratings yet
- Digital Simulation of Field-Oriented ControlDocument8 pagesDigital Simulation of Field-Oriented ControlNishantNo ratings yet
- Larning Objectives: Lab 2: Introduction To Matlab/ Psim Simulation Applied To Half-Wave RectifierDocument8 pagesLarning Objectives: Lab 2: Introduction To Matlab/ Psim Simulation Applied To Half-Wave RectifierMO 'No ratings yet
- Experiment # 2: Analysis of A Three-Phase Power System by Using Simpower System Blockset of MatlabDocument10 pagesExperiment # 2: Analysis of A Three-Phase Power System by Using Simpower System Blockset of MatlabHafsa IjazNo ratings yet
- Power Quality Improvement in DC Drives Using Matlab/SimulinkDocument5 pagesPower Quality Improvement in DC Drives Using Matlab/SimulinkwisdombasedcomputingNo ratings yet
- Fundamentals of Pe PDFDocument37 pagesFundamentals of Pe PDFchinmay pattnayakNo ratings yet
- PAPER 2003 05 en RMS Measuring Principles in The Application of Protective Relaying and MeteringDocument22 pagesPAPER 2003 05 en RMS Measuring Principles in The Application of Protective Relaying and MeteringNirmala AllamNo ratings yet
- Predictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyDocument6 pagesPredictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyYerramsetty SreekanthNo ratings yet
- Wcecs2009 - pp545-549 Computer LoadsDocument5 pagesWcecs2009 - pp545-549 Computer LoadsYogesh MsdNo ratings yet
- Answer (454.57W and 250W) : Power Electronics and Electrical Drives Work Sheet Department of Electromechanical EngDocument2 pagesAnswer (454.57W and 250W) : Power Electronics and Electrical Drives Work Sheet Department of Electromechanical EngDilamo FelekeNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- SEQ - impeDANCE 3-Phase AlternatorDocument7 pagesSEQ - impeDANCE 3-Phase AlternatorNandini JayakumarNo ratings yet
- Zbus 19e120Document4 pagesZbus 19e120Nandini JayakumarNo ratings yet
- ECE241H1 - 20199 - 661580945892ECE241 Midterm Cheat SheetDocument2 pagesECE241H1 - 20199 - 661580945892ECE241 Midterm Cheat SheetNandini JayakumarNo ratings yet
- Harolds Discrete Math Flip Flops Cheat Sheet 2020Document6 pagesHarolds Discrete Math Flip Flops Cheat Sheet 2020Nandini JayakumarNo ratings yet
- Flipflop TablesDocument6 pagesFlipflop TablesNandini JayakumarNo ratings yet
- Caterpillar CG 137-8/12 Service and Rebuild ManualDocument128 pagesCaterpillar CG 137-8/12 Service and Rebuild Manualdave fowlerNo ratings yet
- Model 260 BrochureDocument7 pagesModel 260 BrochureasdsNo ratings yet
- CD500 FHA Operators Manual Rev 03 - 03 PDFDocument127 pagesCD500 FHA Operators Manual Rev 03 - 03 PDFSteve HopkinsNo ratings yet
- Electrical SystemsDocument24 pagesElectrical SystemsLokeshNo ratings yet
- Storage Feeder: Constant Yarn Tension, Fewer Knitting FaultsDocument2 pagesStorage Feeder: Constant Yarn Tension, Fewer Knitting FaultscobaNo ratings yet
- Me 2209 Electrical Engineering Lab ManualDocument45 pagesMe 2209 Electrical Engineering Lab ManualSai Karthi100% (1)
- PELTON Turbine - TPA - Ecowatt Hydro - IREMDocument5 pagesPELTON Turbine - TPA - Ecowatt Hydro - IREMrabei romulusNo ratings yet
- Introduction of Electrical MachinesDocument21 pagesIntroduction of Electrical MachinesUmair MansoorNo ratings yet
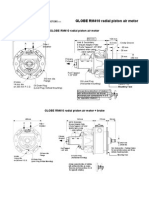
- GLOBE RM410 Radial Piston Air MotorDocument6 pagesGLOBE RM410 Radial Piston Air MotorAbdul Ghofur El AfasyNo ratings yet
- Energies 12 03279Document20 pagesEnergies 12 03279ShadNo ratings yet
- AF-3100 Series: General-Purpose High-Performance Inverter Maintenance ManualDocument88 pagesAF-3100 Series: General-Purpose High-Performance Inverter Maintenance Manualhoang dungNo ratings yet
- AllSem23 MAKAUTDocument81 pagesAllSem23 MAKAUTAmit Bikram MishraNo ratings yet
- 33kV Breaker SpecDocument19 pages33kV Breaker SpecBala KumaranNo ratings yet
- Placement Brochure - NIT GoaDocument34 pagesPlacement Brochure - NIT GoaSujit NairNo ratings yet
- Refrigerator: Service ManualDocument49 pagesRefrigerator: Service ManualCesar Calderon GrNo ratings yet
- DC MotorsDocument7 pagesDC MotorsKelvin LiewNo ratings yet
- Paper TE-2Document8 pagesPaper TE-2Sandro SiagianNo ratings yet
- Stator End Winding Vibration and Temperature Rise MonitoringDocument8 pagesStator End Winding Vibration and Temperature Rise MonitoringAnonymous BBX2E87aHNo ratings yet
- A Noobs Guide To UfopoliticsDocument18 pagesA Noobs Guide To UfopoliticsPraveen240679No ratings yet
- WEG Datasheet DS13095026Document2 pagesWEG Datasheet DS13095026stefancuandreiNo ratings yet
- EE8353 - EDC Anna University Old Question PapersDocument16 pagesEE8353 - EDC Anna University Old Question PapersveenaNo ratings yet
- HV Cast Iron Motors - HXR - 042005Document12 pagesHV Cast Iron Motors - HXR - 042005Alfredo Jose Ramirez MelgarejoNo ratings yet
- Iec 60034 30Document14 pagesIec 60034 30Isaac Diaz100% (1)
- Exp 3Document6 pagesExp 3DHINESH JNo ratings yet
- A4 - TeSys U - EN (Web)Document82 pagesA4 - TeSys U - EN (Web)jorge eduardoNo ratings yet
- Panasonic Kx-mb2025 2030 Service ManualDocument313 pagesPanasonic Kx-mb2025 2030 Service Manualatif38567% (6)
- Fan Power and Heat CalculatorDocument5 pagesFan Power and Heat CalculatorAnonymous oVRvsdWzfBNo ratings yet
- Automatic Coil Winding MachineDocument10 pagesAutomatic Coil Winding Machineayesha sakhiNo ratings yet
- DP Pump CatalogueDocument16 pagesDP Pump CatalogueJust RysdanNo ratings yet
- Induction Motors CDocument557 pagesInduction Motors CMarivee Dollosa100% (2)