You might also like
- An Effective Owl Search Based Optimized Resource Allocation Framework For Network Slicing in An Lte NetworkDocument7 pagesAn Effective Owl Search Based Optimized Resource Allocation Framework For Network Slicing in An Lte NetworkHartanah KedahNo ratings yet
- 1 s2.0 S0140366421004217 MainDocument10 pages1 s2.0 S0140366421004217 MainCharanya JaganNo ratings yet
- Traffic Control in 5G Heterogenous NetworkDocument5 pagesTraffic Control in 5G Heterogenous Networkvardhanw1757No ratings yet
- Dynamic 5G Network SlicingDocument5 pagesDynamic 5G Network SlicingMuhammad Junaid AliNo ratings yet
- SDVN: Enabling Rapid Network Innovation For Heterogeneous Vehicular CommunicationDocument6 pagesSDVN: Enabling Rapid Network Innovation For Heterogeneous Vehicular Communicationbhavana.sd86No ratings yet
- Peng 2021Document19 pagesPeng 2021Thanh KimNo ratings yet
- Delay Aware Downlink Resource Allocation Scheme For Future Generation Tactical Wireless NetworksDocument11 pagesDelay Aware Downlink Resource Allocation Scheme For Future Generation Tactical Wireless NetworksIAES IJAINo ratings yet
- Resource Allocation For Network Slicing in 5G Telecommunication Networks A Survey of Principles and Models PDFDocument8 pagesResource Allocation For Network Slicing in 5G Telecommunication Networks A Survey of Principles and Models PDFWaleed AlmarshediNo ratings yet
- SDN For 5GDocument4 pagesSDN For 5GMauricio ManriqueNo ratings yet
- Smart Power Control For Quality-Driven Multi-User Video Transmissions A Deep Reinforcement Learning ApproachDocument12 pagesSmart Power Control For Quality-Driven Multi-User Video Transmissions A Deep Reinforcement Learning ApproachThompson JM NicholasNo ratings yet
- Resource Orchestration in 5G and Beyond Challenges and OpportunitiesDocument5 pagesResource Orchestration in 5G and Beyond Challenges and OpportunitiesOussema OUERFELLINo ratings yet
- Software-Defined Allocation and Virtualization For Broadband Multi - Beam Satellite Communication Networks Based On High Throughput SatellitesDocument8 pagesSoftware-Defined Allocation and Virtualization For Broadband Multi - Beam Satellite Communication Networks Based On High Throughput SatellitesNoureldin mohamed abdelaalNo ratings yet
- Rans: T M - T 5G A N: Licing Owards Ulti Enancy in Radio Ccess EtworksDocument9 pagesRans: T M - T 5G A N: Licing Owards Ulti Enancy in Radio Ccess EtworksYounouss KEITANo ratings yet
- Provisioning of 5G Services Employing MachineDocument6 pagesProvisioning of 5G Services Employing MachinepathmakerpkNo ratings yet
- Thiago So Us Are de Sarti GoDocument10 pagesThiago So Us Are de Sarti GoThiago messi 12No ratings yet
- Publi 6337Document15 pagesPubli 6337Cosmin AndreiNo ratings yet
- 2nd Research Paper ConcurrencyDocument18 pages2nd Research Paper ConcurrencySukarn GahlautNo ratings yet
- Topological Planningand Designof Heterogeneous Mobile Networksin Dense AreasDocument7 pagesTopological Planningand Designof Heterogeneous Mobile Networksin Dense Areasfelix NizeyimanaNo ratings yet
- Cooperative Spectrum Sensing Deployment For Cognitive Radio Networks For Internet of Things 5G WirelesDocument23 pagesCooperative Spectrum Sensing Deployment For Cognitive Radio Networks For Internet of Things 5G Wirelesbvkarthik2711No ratings yet
- Resource Optimization-Based Network Selection Model For Heterogeneous Wireless NetworksDocument10 pagesResource Optimization-Based Network Selection Model For Heterogeneous Wireless NetworksIAES IJAINo ratings yet
- Applied Sciences: Latency-Optimal Virtual Network Functions Resource Allocation For 5G Backhaul Transport Network SlicingDocument21 pagesApplied Sciences: Latency-Optimal Virtual Network Functions Resource Allocation For 5G Backhaul Transport Network SlicingMai AwadNo ratings yet
- Intelligent Resource Scheduling For 5G Radio Access Network SlicingDocument14 pagesIntelligent Resource Scheduling For 5G Radio Access Network SlicingCristian GuleiNo ratings yet
- Base Paper - A - Software-Defined - UAV - Network - Using - Queueing - ModelDocument18 pagesBase Paper - A - Software-Defined - UAV - Network - Using - Queueing - ModelDebayani GhoshNo ratings yet
- Electronics: Network Slicing For Beyond 5G Systems: An Overview of The Smart Port Use CaseDocument17 pagesElectronics: Network Slicing For Beyond 5G Systems: An Overview of The Smart Port Use CaseDhiljeet GaonkarNo ratings yet
- D Evice - To - D Evice C Ommunication U Nderlaying C Onverged H Eterogeneous N EtworksDocument10 pagesD Evice - To - D Evice C Ommunication U Nderlaying C Onverged H Eterogeneous N EtworksBaidalKochamNo ratings yet
- I Jcs It 2016070167Document4 pagesI Jcs It 2016070167Anup PandeyNo ratings yet
- Resource Allocation For D2D-Enabled Vehicular CommunicationsDocument12 pagesResource Allocation For D2D-Enabled Vehicular CommunicationswangxipowerfulNo ratings yet
- Overview of 5g Security Challenges and Solutions 2018Document8 pagesOverview of 5g Security Challenges and Solutions 2018Abhishek DishankitNo ratings yet
- Device-to-Device Communications Underlaying An Uplink SCMA SystemDocument13 pagesDevice-to-Device Communications Underlaying An Uplink SCMA SystemArunam GoyalNo ratings yet
- 2020 A UAV-based Moving 5G RAN For Massive Connectivity of Mobile Users and IoT DevicesDocument11 pages2020 A UAV-based Moving 5G RAN For Massive Connectivity of Mobile Users and IoT Devicestoan đinhNo ratings yet
- GAN-powered Deep Distributional Reinforcement Learning For Resource Management in Network SlicinggDocument16 pagesGAN-powered Deep Distributional Reinforcement Learning For Resource Management in Network SlicinggThompson JM NicholasNo ratings yet
- Bonati 2020 OpenDocument28 pagesBonati 2020 Openvardhanw1757No ratings yet
- Engineering Science and Technology, An International JournalDocument11 pagesEngineering Science and Technology, An International JournalNader JalalNo ratings yet
- QoS-Aware 5G ComponentDocument11 pagesQoS-Aware 5G ComponentChuong DangNo ratings yet
- IT and Multi-Layer Online Resource Allocation and Offline Planning in Metropolitan NetworksDocument10 pagesIT and Multi-Layer Online Resource Allocation and Offline Planning in Metropolitan Networkskarthiga RNo ratings yet
- Priority-Aware VM Allocation and Network Bandwidth Provisioning in Software-Defined Networking (SDN) - Enabled CloudsDocument12 pagesPriority-Aware VM Allocation and Network Bandwidth Provisioning in Software-Defined Networking (SDN) - Enabled CloudsNandini B NNo ratings yet
- Artificial Intelligence For Enhanced Mobility and 5G Connectivity in UAV-Based Critical MissionsDocument10 pagesArtificial Intelligence For Enhanced Mobility and 5G Connectivity in UAV-Based Critical MissionsHemanth PNo ratings yet
- Energy-Efficient Multi-UAV-Enabled Multiaccess Edge Computing Incorporating NOMADocument15 pagesEnergy-Efficient Multi-UAV-Enabled Multiaccess Edge Computing Incorporating NOMAAnh Nhat NguyenNo ratings yet
- 5G Resilient Backhaul Using Integrated SatelliteDocument6 pages5G Resilient Backhaul Using Integrated SatelliteAbraxasOssuaryNo ratings yet
- A Qos-Oriented Distributed Routing Protocol For Hybrid Wireless NetworksDocument16 pagesA Qos-Oriented Distributed Routing Protocol For Hybrid Wireless NetworksNYIRIKUTONo ratings yet
- Survey of Optimizing Dynamic Virtual Local Area Network Algorithm For Software-Defined Wide Area NetworkDocument11 pagesSurvey of Optimizing Dynamic Virtual Local Area Network Algorithm For Software-Defined Wide Area NetworkTELKOMNIKANo ratings yet
- Deep Reinforcement Learning For Network Slicing With Heterogeneous Resource Requirements and Time Varying Traffic Dynamics - Koo Et Al. 2019Document9 pagesDeep Reinforcement Learning For Network Slicing With Heterogeneous Resource Requirements and Time Varying Traffic Dynamics - Koo Et Al. 2019Evenso NdlovuNo ratings yet
- Review Article Drl-Based Intelligent Resource Allocation For Diverse Qos in 5G and Toward 6G Vehicular Networks: A Comprehensive SurveyDocument21 pagesReview Article Drl-Based Intelligent Resource Allocation For Diverse Qos in 5G and Toward 6G Vehicular Networks: A Comprehensive SurveyTech SavvyNo ratings yet
- Network Data Management in 5G Network For User Data Privacy - A SurveyDocument6 pagesNetwork Data Management in 5G Network For User Data Privacy - A SurveyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Network Control and Management Automation Architecture Standardization PerspectiveDocument9 pagesNetwork Control and Management Automation Architecture Standardization Perspectiverkjadhav1453No ratings yet
- Efficient Solutions To The Placement and Chaining Problem of User PlaneDocument16 pagesEfficient Solutions To The Placement and Chaining Problem of User PlaneOussema OUERFELLINo ratings yet
- Clustering and Resource Allocation Strategy For D2D Multicast Networks With Machine Learning Approaches WorkingDocument16 pagesClustering and Resource Allocation Strategy For D2D Multicast Networks With Machine Learning Approaches Workingzaman9206No ratings yet
- The SELFNET Approach For Autonomic ManagDocument17 pagesThe SELFNET Approach For Autonomic ManagSomasekhar VuyyuruNo ratings yet
- Software Defined Networking Enabled Wireless Network Virtualization - Challenges and Solutions - Ning Zhang Et Al PDFDocument16 pagesSoftware Defined Networking Enabled Wireless Network Virtualization - Challenges and Solutions - Ning Zhang Et Al PDFguimanolNo ratings yet
- Evaluation Method For SDN Network Effectiveness in Next Generation Cellular NetworksDocument8 pagesEvaluation Method For SDN Network Effectiveness in Next Generation Cellular NetworksChaimaa GhazzaouiNo ratings yet
- Improved Metaheuristic-Driven Energy-Aware Cluster-Based Routing Scheme For Iot-Assisted Wireless Sensor NetworksDocument19 pagesImproved Metaheuristic-Driven Energy-Aware Cluster-Based Routing Scheme For Iot-Assisted Wireless Sensor Networkssaba kanwalNo ratings yet
- S JNL Vol4.Issue2 2023 A20 PDF eDocument16 pagesS JNL Vol4.Issue2 2023 A20 PDF eozlembulurNo ratings yet
- Open-Source Network Optimization Software in The Open SDN/NFV Transport EcosystemDocument14 pagesOpen-Source Network Optimization Software in The Open SDN/NFV Transport EcosystemAldo Setyawan JayaNo ratings yet
- Collaborative Mobile Edge Computing in 5G Networks: New Paradigms, Scenarios, and ChallengesDocument7 pagesCollaborative Mobile Edge Computing in 5G Networks: New Paradigms, Scenarios, and Challengesمحمد توفيقNo ratings yet
- 5G Security Survey Revision Clean CopyDocument56 pages5G Security Survey Revision Clean CopyKanwal KhanNo ratings yet
- 5G Radio Access Networks A Survey - 2022 - ArrayDocument10 pages5G Radio Access Networks A Survey - 2022 - ArrayMetro Electronics ScaleNo ratings yet
- Call Block and QualityDocument6 pagesCall Block and QualityshanmalayoteNo ratings yet
- Hybrid Content Location Failure Tolerant Protocol For Wireless Ad Hoc NetworksDocument7 pagesHybrid Content Location Failure Tolerant Protocol For Wireless Ad Hoc Networksvol1no2No ratings yet
- R S D R 5Gm C S: Econfigurable Oftware Efined Adio in Obile Ommunication YstemsDocument3 pagesR S D R 5Gm C S: Econfigurable Oftware Efined Adio in Obile Ommunication YstemsSanaullah KhanNo ratings yet
- Software Defined Networking (SDN) - a definitive guideFrom EverandSoftware Defined Networking (SDN) - a definitive guideRating: 2 out of 5 stars2/5 (2)
- Artificial Intelligence Enabled Demand Response Prospects and Challenges in Smart Grid EnvironmentDocument29 pagesArtificial Intelligence Enabled Demand Response Prospects and Challenges in Smart Grid EnvironmentRaspberry Pi100% (1)
- A Review On Cyber Security and Anomaly Detection Perspectives of Smart GridDocument6 pagesA Review On Cyber Security and Anomaly Detection Perspectives of Smart GridRaspberry PiNo ratings yet
- Data-Driven Apprehension of Cyber and Physical Anomalies in Distribution SystemDocument6 pagesData-Driven Apprehension of Cyber and Physical Anomalies in Distribution SystemRaspberry PiNo ratings yet
- 11 ConclusionDocument3 pages11 ConclusionRaspberry PiNo ratings yet
- 10 - Introduction To Power System ReliabilityDocument35 pages10 - Introduction To Power System ReliabilityRaspberry PiNo ratings yet
- 7 - Balanced FaultsDocument49 pages7 - Balanced FaultsRaspberry PiNo ratings yet
- 5 - DC Power FlowDocument44 pages5 - DC Power FlowRaspberry PiNo ratings yet
- 4 - Load Flow AnalysisDocument62 pages4 - Load Flow AnalysisRaspberry PiNo ratings yet
- 1 - Review of Basic ConceptsDocument77 pages1 - Review of Basic ConceptsRaspberry PiNo ratings yet
- Harmonics PatternsDocument4 pagesHarmonics PatternsIzzadAfif1990No ratings yet
- 02-Building Cooling LoadsDocument3 pages02-Building Cooling LoadspratheeshNo ratings yet
- Goliath 90 v129 eDocument129 pagesGoliath 90 v129 eerkanNo ratings yet
- AssessmentDocument3 pagesAssessmentpalflaxNo ratings yet
- Hydrodynamic Calculation Butterfly Valve (Double Disc)Document31 pagesHydrodynamic Calculation Butterfly Valve (Double Disc)met-calcNo ratings yet
- Fully Automatic Coffee Machine - Slimissimo - IB - SCOTT UK - 2019Document20 pagesFully Automatic Coffee Machine - Slimissimo - IB - SCOTT UK - 2019lazareviciNo ratings yet
- Electric ScootorDocument40 pagesElectric Scootor01fe19bme079No ratings yet
- Paediatric Intake Form Modern OT 2018Document6 pagesPaediatric Intake Form Modern OT 2018SefNo ratings yet
- OurCatholicFaith PowerPoint Chapter1Document21 pagesOurCatholicFaith PowerPoint Chapter1VinNo ratings yet
- Why Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmDocument6 pagesWhy Are Solids Are Floating On My Secondary Clarifier - Biological Waste TreatmIsaac FernándezNo ratings yet
- Managing Diabetic Foot Ulcers ReadingDocument21 pagesManaging Diabetic Foot Ulcers Readinghimanshugupta811997No ratings yet
- Tree Growth CharacteristicsDocument9 pagesTree Growth CharacteristicsMunganNo ratings yet
- SAT Practice TestDocument77 pagesSAT Practice TestfhfsfplNo ratings yet
- IV. Network Modeling, Simple SystemDocument16 pagesIV. Network Modeling, Simple SystemJaya BayuNo ratings yet
- Fighting Techniques of The Early Modern World AD 1500-AD 1763 - Equipment Combat Skills Amp Amp TacticsDocument258 pagesFighting Techniques of The Early Modern World AD 1500-AD 1763 - Equipment Combat Skills Amp Amp Tacticslupoeva100% (3)
- Chapter 7 - Muscular SystemDocument29 pagesChapter 7 - Muscular SystemlNo ratings yet
- 9 5 - 358 362 PDFDocument5 pages9 5 - 358 362 PDFمالك مناصرةNo ratings yet
- Cathodic Protection Catalog - New 8Document1 pageCathodic Protection Catalog - New 8dhineshNo ratings yet
- DR PDFDocument252 pagesDR PDFa_ouchar0% (1)
- Determination of Drop-Impact Resistance of Plastic BottlesDocument11 pagesDetermination of Drop-Impact Resistance of Plastic BottlesAndres BrañaNo ratings yet
- Elements of Romanticism in The Poetry of W. B. Yeats: Romantic InfluencesDocument8 pagesElements of Romanticism in The Poetry of W. B. Yeats: Romantic InfluencesSadman Shaid SaadNo ratings yet
- DMDWLab Book AnswersDocument44 pagesDMDWLab Book AnswersNarpat Makwana Pune100% (1)
- The Light Fantastic by Sarah CombsDocument34 pagesThe Light Fantastic by Sarah CombsCandlewick PressNo ratings yet
- Prestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanDocument21 pagesPrestige Institute of Management & Research: Guided By:-Submitted By: - Prof. Arpit Loya Sumeet RattanSumeet700005No ratings yet
- American BreakfastDocument4 pagesAmerican BreakfastHamilton Valenzuela ChipongianNo ratings yet
- Market AnalysisDocument4 pagesMarket AnalysisSaniya CharaniyaNo ratings yet
- CBSE DetailsDocument6 pagesCBSE DetailsNARESH KUMARNo ratings yet
- Top Ten Myths About The BrainDocument5 pagesTop Ten Myths About The BrainfayazalamaligNo ratings yet
- Scott 2001Document20 pagesScott 2001Mariana CatiniNo ratings yet
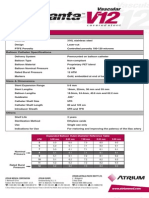
- Advanta V12 Data SheetDocument2 pagesAdvanta V12 Data SheetJuliana MiyagiNo ratings yet