You might also like
- Estimating hydrodynamics coefficients of ROVs using free decay pendulum motionDocument7 pagesEstimating hydrodynamics coefficients of ROVs using free decay pendulum motionmohamedNo ratings yet
- Structural Identification of A Long Span Truss BridgeDocument10 pagesStructural Identification of A Long Span Truss Bridgemina saadatNo ratings yet
- AUV 150 Development and Sea TrialsDocument13 pagesAUV 150 Development and Sea TrialsAnand Kishor SinghNo ratings yet
- Manoeuvring CommitteeDocument62 pagesManoeuvring Committeea aNo ratings yet
- New Calculations From Hydrocomp Using Quantitative Relational ElementsDocument4 pagesNew Calculations From Hydrocomp Using Quantitative Relational Elementstheleepiper8830No ratings yet
- Development of Time-Domain VIV Prediction and Analysis ToolDocument19 pagesDevelopment of Time-Domain VIV Prediction and Analysis ToolNguyen ThangNo ratings yet
- Project WorkDocument23 pagesProject Workayushpandey12344.apNo ratings yet
- Marine Propeller Optimization DesignDocument8 pagesMarine Propeller Optimization DesignSumit DasNo ratings yet
- At-Speed Transition Fault Testing With Low Speed Scan EnableDocument7 pagesAt-Speed Transition Fault Testing With Low Speed Scan EnableLuyen VoNo ratings yet
- Reliable AUV Autosub's operational recordDocument27 pagesReliable AUV Autosub's operational recordjaiprakash nainNo ratings yet
- Small-Craft Power PredictionsDocument33 pagesSmall-Craft Power PredictionsbourneremembersNo ratings yet
- Design Toy Submarine Underwater VehicleDocument8 pagesDesign Toy Submarine Underwater VehicleErickson OngNo ratings yet
- Oil & Gas - High ResolutionDocument24 pagesOil & Gas - High ResolutionSubhra S SanyalNo ratings yet
- IAC-17.C4.4.3 Current Status of Nasa'S Next-C Ion Propulsion System Development Project Rohit ShastryDocument5 pagesIAC-17.C4.4.3 Current Status of Nasa'S Next-C Ion Propulsion System Development Project Rohit Shastrykilikol174No ratings yet
- Senior Project Report - Automatic Usv WqmsDocument34 pagesSenior Project Report - Automatic Usv Wqmsapi-612464940No ratings yet
- Using Ann Modelling For Predicting The Duration of Construction Projects in IraqDocument10 pagesUsing Ann Modelling For Predicting The Duration of Construction Projects in IraqEquar Beyra EquarNo ratings yet
- Design and Development of An Autonomous UnderwaterDocument6 pagesDesign and Development of An Autonomous UnderwaterKrishna TejaNo ratings yet
- p814 PDFDocument8 pagesp814 PDF1978ECRNo ratings yet
- Wave Energy Converter Modeling: Yi-Hsiang YuDocument14 pagesWave Energy Converter Modeling: Yi-Hsiang YuHashirama SenjuNo ratings yet
- PDA Testing Assess Pile CapacityDocument2 pagesPDA Testing Assess Pile Capacityphongmel50% (2)
- High-Speed_Obstacle_Avoidance_of_a_Large-Scale_Underactuated_Autonomous_Underwater_Vehicle_Under_a_Finite_Field_of_ViewDocument10 pagesHigh-Speed_Obstacle_Avoidance_of_a_Large-Scale_Underactuated_Autonomous_Underwater_Vehicle_Under_a_Finite_Field_of_Viewq.sun.cseNo ratings yet
- Small Craft Power PredictionDocument32 pagesSmall Craft Power Predictionaeromexpower2009No ratings yet
- Design and Development of An Autonomous UnderwaterDocument6 pagesDesign and Development of An Autonomous UnderwaterayyappadasNo ratings yet
- Real-Time Simulation of A COGAG Naval Ship Propulsion SystemDocument15 pagesReal-Time Simulation of A COGAG Naval Ship Propulsion SystemCarlos PariNo ratings yet
- Efficient Path Planning for Unmanned Surface VehiclesDocument7 pagesEfficient Path Planning for Unmanned Surface VehiclesJayashree T R 21PHD1140No ratings yet
- Bridge Asset Management Capability Statement GlobalDocument5 pagesBridge Asset Management Capability Statement GlobalKarishma JuttunNo ratings yet
- Case Study: Performance-Based Seismic Design of Reinforced Concrete Dual System BuildingDocument9 pagesCase Study: Performance-Based Seismic Design of Reinforced Concrete Dual System BuildingQorry OktaliaNo ratings yet
- Otc 18587 MS PDocument15 pagesOtc 18587 MS PSiul Otrebla AtelavazNo ratings yet
- SAJESHDocument3 pagesSAJESHrfvz6sNo ratings yet
- Bundle of 24 Abstracts For NRC-IOT UVT 2010 Workshop 24oct10Document29 pagesBundle of 24 Abstracts For NRC-IOT UVT 2010 Workshop 24oct10Hairil AfifNo ratings yet
- NASA 140637main ESAS 06Document150 pagesNASA 140637main ESAS 06NASAdocumentsNo ratings yet
- Slides For Progress PresentationS38005Document21 pagesSlides For Progress PresentationS38005Samuel TanNo ratings yet
- SACS Marine Data SheetDocument2 pagesSACS Marine Data Sheet郑裕 鸿No ratings yet
- A New Remotely Operated Underwater Vehicle For Dynamics and Control ResearchDocument8 pagesA New Remotely Operated Underwater Vehicle For Dynamics and Control ResearchCao Quang HưngNo ratings yet
- Sword Factsheet PDFDocument2 pagesSword Factsheet PDFcarupano7No ratings yet
- Energy Conversion and ManagementDocument13 pagesEnergy Conversion and ManagementMohammadreza NaghaviNo ratings yet
- System Based Design of Offshore Support Vessels: January 2012Document18 pagesSystem Based Design of Offshore Support Vessels: January 2012Harsha CheemakurthyNo ratings yet
- RvsatDocument14 pagesRvsatAbyan RaidhNo ratings yet
- Conceptual Design of A High-Speed Superyacht Tender PDFDocument71 pagesConceptual Design of A High-Speed Superyacht Tender PDFgksaha100% (1)
- Design of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)Document11 pagesDesign of A Mooring System For An Offshore Structure: A Case Study of 5000 Tonnes Offshore Work Barge (WB)leokareyxoxoersNo ratings yet
- 2003 Development20of20X-ray20ScannerDocument7 pages2003 Development20of20X-ray20ScannerBABLU TIWARINo ratings yet
- 2015 Kurian Component-Reliability-Assessment-of-Offshore-Jacket-PlatformsDocument11 pages2015 Kurian Component-Reliability-Assessment-of-Offshore-Jacket-Platformsklop disposableNo ratings yet
- Ij Es Vnim 14aDocument15 pagesIj Es Vnim 14aNguyễn LaNo ratings yet
- Mooring PublicationDocument11 pagesMooring PublicationNinad Anil Bhaskarwar oe21m012No ratings yet
- Guidelines On Technical SpecificationsDocument5 pagesGuidelines On Technical SpecificationsRayodcNo ratings yet
- Course Agenda 155Document9 pagesCourse Agenda 155Ephrem GizachewNo ratings yet
- Estimation of The Hydrodynamics CoefficientsDocument6 pagesEstimation of The Hydrodynamics CoefficientsManh Dien HuynhNo ratings yet
- Openvins: A Research Platform For Visual-Inertial EstimationDocument8 pagesOpenvins: A Research Platform For Visual-Inertial Estimationusman arifNo ratings yet
- Performance of Pushover Procedure in Evaluating THDocument15 pagesPerformance of Pushover Procedure in Evaluating THOun KimhengNo ratings yet
- PB 91190561Document126 pagesPB 91190561Les GarciaNo ratings yet
- Case Study Mechanical TT Well InterventionDocument4 pagesCase Study Mechanical TT Well Intervention魏永涛No ratings yet
- NASA 149779main Const Assign CentersDocument11 pagesNASA 149779main Const Assign CentersNASAdocumentsNo ratings yet
- 19 - Simulation of Observed Traffic Conditions On Roundabouts by Dedicated SoftwareDocument13 pages19 - Simulation of Observed Traffic Conditions On Roundabouts by Dedicated SoftwarevincerixNo ratings yet
- Dynamic Load Test of Foundation Pile: Goldcrest ViewsDocument11 pagesDynamic Load Test of Foundation Pile: Goldcrest ViewsZohair AtaullahNo ratings yet
- Ndarc - NasaDocument26 pagesNdarc - Nasagio903No ratings yet
- Performance-Based Design Factors For Pile Foundations: October 2014 WA-RD 827.1Document213 pagesPerformance-Based Design Factors For Pile Foundations: October 2014 WA-RD 827.1mohmmedNo ratings yet
- VLFSDocument52 pagesVLFSGuille8No ratings yet
- IADC/SPE 39321 A Robust Torque and Drag Analysis Approach For Well Planning and Drillstring DesignDocument16 pagesIADC/SPE 39321 A Robust Torque and Drag Analysis Approach For Well Planning and Drillstring DesignmsfNo ratings yet
- velocity and dragDocument12 pagesvelocity and dragAnh NgoNo ratings yet
- 1 s2.0 S2092678216301881 Main PDFDocument13 pages1 s2.0 S2092678216301881 Main PDFcfdenggNo ratings yet
- Thrust Characteristics of Ducted Propeller and Hydrodynamics of an Underwater Vehicle in Control MotionsDocument19 pagesThrust Characteristics of Ducted Propeller and Hydrodynamics of an Underwater Vehicle in Control MotionsAnh NgoNo ratings yet
- (CAD) NX12 Tutorial CH3 Two Dimensional SketchingDocument18 pages(CAD) NX12 Tutorial CH3 Two Dimensional SketchingAnh NgoNo ratings yet
- Applsci 13 01551Document16 pagesApplsci 13 01551Anh NgoNo ratings yet
- AoA and Lift CoefficientDocument7 pagesAoA and Lift CoefficientAnh NgoNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- Analysis of Hydrodynamic Interaction Impacts On A two-AUV SystemDocument13 pagesAnalysis of Hydrodynamic Interaction Impacts On A two-AUV SystemAnh NgoNo ratings yet
- Debarros 2008Document12 pagesDebarros 2008Anh NgoNo ratings yet
- Automated Ballast Tank Control System For Autonomous Underwater VehiclesDocument13 pagesAutomated Ballast Tank Control System For Autonomous Underwater Vehicles潘子豪No ratings yet
- Debarros 2008Document12 pagesDebarros 2008Anh NgoNo ratings yet
- Jmse 10 01049 v2Document22 pagesJmse 10 01049 v2Anh NgoNo ratings yet
- 10 2339-Politeknik 675632-932982Document16 pages10 2339-Politeknik 675632-932982Anh NgoNo ratings yet
- 10 2339-Politeknik 675632-932982Document16 pages10 2339-Politeknik 675632-932982Anh NgoNo ratings yet
- Ocean Engineering: A. Mitra, J.P. Panda, H.V. WarriorDocument11 pagesOcean Engineering: A. Mitra, J.P. Panda, H.V. WarriorAndres ArtiedaNo ratings yet
- V73No3P7 C1551 OSP HouDocument24 pagesV73No3P7 C1551 OSP HouAnh NgoNo ratings yet
- Design Optimization of Duct-Type AUVs Using CFD AnalysisDocument13 pagesDesign Optimization of Duct-Type AUVs Using CFD AnalysisManh Dien HuynhNo ratings yet
- V73No3P7 C1551 OSP HouDocument24 pagesV73No3P7 C1551 OSP HouAnh NgoNo ratings yet
- J Oceaneng 2019 05 030Document18 pagesJ Oceaneng 2019 05 030Anh NgoNo ratings yet
- Hull Shape Optimization For Autonomous Underwater Vehicles Using CFDDocument10 pagesHull Shape Optimization For Autonomous Underwater Vehicles Using CFDSAIDINo ratings yet
- Applsci 13 01551Document16 pagesApplsci 13 01551Anh NgoNo ratings yet
- Liu 2021Document13 pagesLiu 2021Anh NgoNo ratings yet
- E1JSE6 2011 v3n3 174Document7 pagesE1JSE6 2011 v3n3 174Anh NgoNo ratings yet
- Design and Testing of The Marport SQX-500Document9 pagesDesign and Testing of The Marport SQX-500Anh NgoNo ratings yet
- Myring 1976Document9 pagesMyring 1976Anh NgoNo ratings yet
- E1JSE6 2011 v3n3 174Document7 pagesE1JSE6 2011 v3n3 174Anh NgoNo ratings yet
- 2022-Deisgn of A Disc-Shaped AUH With Stable FinsDocument16 pages2022-Deisgn of A Disc-Shaped AUH With Stable FinsAnh NgoNo ratings yet
- 2022-Design and Development of AUH - HiệpDocument15 pages2022-Design and Development of AUH - HiệpAnh NgoNo ratings yet
- Applsci 13 01551Document16 pagesApplsci 13 01551Anh NgoNo ratings yet
- CV MonirDocument3 pagesCV MonirMIslamMonirNo ratings yet
- USB Charging Port Power Switch and Controller: Features DescriptionDocument42 pagesUSB Charging Port Power Switch and Controller: Features DescriptionJagopati Jr.No ratings yet
- Quick Installation Guide: Quick Setup Using Your Web BrowserDocument2 pagesQuick Installation Guide: Quick Setup Using Your Web BrowserOmerNo ratings yet
- PCB Designing and PrintingDocument14 pagesPCB Designing and PrintingAditya Patwardhan100% (1)
- Elixir Examples: Get a Value from Nested MapsDocument33 pagesElixir Examples: Get a Value from Nested MapsflavioNo ratings yet
- Science5 - q3 - Mod2 - Some Materials As Good Conductor of Heat and Electricity Part 2Document16 pagesScience5 - q3 - Mod2 - Some Materials As Good Conductor of Heat and Electricity Part 2Cheyanne Aiyana SomoNo ratings yet
- Calculation of Short Circuit Current As Per IEC60909Document16 pagesCalculation of Short Circuit Current As Per IEC60909MuhammadHaekal100% (1)
- Vector SynthesisDocument19 pagesVector SynthesisGiorgio Magnanensi100% (1)
- Thesis Topics On Production EngineeringDocument7 pagesThesis Topics On Production Engineeringafknojbcf100% (2)
- Agricultural and Food Engineering (Dual Degree) : Shubham Patidar - 16ag30024Document1 pageAgricultural and Food Engineering (Dual Degree) : Shubham Patidar - 16ag30024Shubham PatidarNo ratings yet
- Dica BAPIDocument5 pagesDica BAPIGustavoNo ratings yet
- POF 303 ILI Data Feedback Form - Nov 2021Document4 pagesPOF 303 ILI Data Feedback Form - Nov 2021Satya RaoNo ratings yet
- Device Expert Credentials TutorialDocument12 pagesDevice Expert Credentials TutorialMuhammadNurIqbalNo ratings yet
- Basic Computer Skills and LiteracyDocument6 pagesBasic Computer Skills and LiteracyKrisyl Joy B. GalleronNo ratings yet
- Electromagnetic Compatibility of Industrial Networks and FieldbusesDocument38 pagesElectromagnetic Compatibility of Industrial Networks and FieldbusesCarlos ChocobarNo ratings yet
- Visual ResumeDocument1 pageVisual ResumeSachin KumarNo ratings yet
- 2004 Corolla Electrical Diagram - Light and Key Reminder BuzzerDocument4 pages2004 Corolla Electrical Diagram - Light and Key Reminder BuzzerNick BaptisteNo ratings yet
- Explore Our 2018 Motorcycle CollectionDocument8 pagesExplore Our 2018 Motorcycle CollectionToni Kuzmanić100% (1)
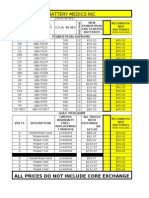
- Updated Price ListDocument2 pagesUpdated Price ListbatterymedicsNo ratings yet
- Architectural Services: Design to Defects LiabilityDocument10 pagesArchitectural Services: Design to Defects Liabilityharshinireddy mandadiNo ratings yet
- Close Out ReportDocument16 pagesClose Out ReportAriff MuhamadNo ratings yet
- Data-Driven Professional with 6+ Years Experience in Analytics, Forecasting and PricingDocument1 pageData-Driven Professional with 6+ Years Experience in Analytics, Forecasting and PricingSanthosh Kumar SettyNo ratings yet
- GP 48-04Document27 pagesGP 48-04snikraftar1406No ratings yet
- Jenbacher Type-6 EngineDocument24 pagesJenbacher Type-6 EngineAb Hannan chowdhury100% (1)
- TALENT PIPELINEDocument6 pagesTALENT PIPELINEJayNo ratings yet
- 931 - Mikro PFR 6 PDFDocument2 pages931 - Mikro PFR 6 PDFMOHD JIDINo ratings yet
- Certificate of Calibration: Instruction ManualDocument2 pagesCertificate of Calibration: Instruction ManualLuis Alberto Garcia Caycho0% (2)
- KE21S Simulate ValuationDocument5 pagesKE21S Simulate ValuationPrathamesh ParkerNo ratings yet
- A Powerful Arcgis Pro Plugin Built For The Natural Resource IndustryDocument3 pagesA Powerful Arcgis Pro Plugin Built For The Natural Resource IndustryguanatosNo ratings yet
- Locate Electrical Equipment on Vintage VehicleDocument146 pagesLocate Electrical Equipment on Vintage VehicleSteve Wharfe100% (5)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- Visions Of Technology: A Century Of Vital Debate About Machines Systems AFrom EverandVisions Of Technology: A Century Of Vital Debate About Machines Systems ARating: 4 out of 5 stars4/5 (9)
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Modeling, Dynamics, and Control of Electrified VehiclesFrom EverandModeling, Dynamics, and Control of Electrified VehiclesRating: 5 out of 5 stars5/5 (1)
- ChatGPT: The Future of Intelligent ConversationFrom EverandChatGPT: The Future of Intelligent ConversationRating: 3.5 out of 5 stars3.5/5 (8)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsFrom EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsRating: 5 out of 5 stars5/5 (3)