You might also like
- Sensors 22 04083 v3Document17 pagesSensors 22 04083 v3amir pagoliNo ratings yet
- Fundamentals of Electromigration-Aware Integrated Circuit DesignFrom EverandFundamentals of Electromigration-Aware Integrated Circuit DesignNo ratings yet
- Pressure sensorDocument9 pagesPressure sensorduong nguyenNo ratings yet
- Technologies For Printing Sensors and Electronics Over Large Flexible Substrates: A ReviewDocument22 pagesTechnologies For Printing Sensors and Electronics Over Large Flexible Substrates: A ReviewShweta KumariNo ratings yet
- Inkjet-Printed "Zero-Power" Wireless SensorDocument4 pagesInkjet-Printed "Zero-Power" Wireless Sensordamian.wronski.95.dwsNo ratings yet
- Journal of Industrial and Engineering ChemistryDocument11 pagesJournal of Industrial and Engineering ChemistrySahin CoskunNo ratings yet
- Nanotechnology in Communication Engineering: Issues, Applications, and Future PossibilitiesDocument16 pagesNanotechnology in Communication Engineering: Issues, Applications, and Future PossibilitiesAkanksh J ShettyNo ratings yet
- Inkjet-Printed, Coplanar Electrolyte-Gated Organic FETDocument12 pagesInkjet-Printed, Coplanar Electrolyte-Gated Organic FETjamel-shamsNo ratings yet
- Optical Force Tactile Sensors For Robotic ApplicationsDocument8 pagesOptical Force Tactile Sensors For Robotic ApplicationsMARIA CAMILA MURILLO CARDENASNo ratings yet
- Sensors 19 04591Document11 pagesSensors 19 04591kukuNo ratings yet
- 2013 Continuous Tuning of The Mechanical Sensitivity of Pentacene OTFTs On Exible Substrates - From Strain Sensors To Deformable TransistorsDocument6 pages2013 Continuous Tuning of The Mechanical Sensitivity of Pentacene OTFTs On Exible Substrates - From Strain Sensors To Deformable TransistorsDoktor transmisionesNo ratings yet
- Continuous Tuning of OTFT SensitivityDocument6 pagesContinuous Tuning of OTFT SensitivityDoktor transmisionesNo ratings yet
- Advances in Exible Organic Field-Effect Transistors and Their Applications For Exible ElectronicsDocument19 pagesAdvances in Exible Organic Field-Effect Transistors and Their Applications For Exible ElectronicsMZeeshanAkramNo ratings yet
- Handbook of VLSI Microlithography: Principles, Technology and ApplicationsFrom EverandHandbook of VLSI Microlithography: Principles, Technology and ApplicationsWilliam B. GlendinningRating: 5 out of 5 stars5/5 (1)
- avagDocument40 pagesavagNghĩa TrọngNo ratings yet
- Adv Materials Technologies - 2022 - Chennit - Inkjet Printed Coplanar Electrolyte Gated Organic Field Effect TransistorsDocument12 pagesAdv Materials Technologies - 2022 - Chennit - Inkjet Printed Coplanar Electrolyte Gated Organic Field Effect Transistorsslem.kasemmNo ratings yet
- Nano Energy: Mayue Shi, Hanxiang Wu, Jinxin Zhang, Mengdi Han, Bo Meng, Haixia ZhangDocument9 pagesNano Energy: Mayue Shi, Hanxiang Wu, Jinxin Zhang, Mengdi Han, Bo Meng, Haixia ZhangGabriella CsernákNo ratings yet
- Ultrathin, Flexible and Multimodal Tactile Sensors Based On Organic Field-Effect TransistorsDocument8 pagesUltrathin, Flexible and Multimodal Tactile Sensors Based On Organic Field-Effect TransistorsAnonymous BZzNciQqNo ratings yet
- Tactile Sensing With Scalable Capacitive SensorDocument15 pagesTactile Sensing With Scalable Capacitive Sensorhello worldNo ratings yet
- Technologies for Printing Sensors and ElectronicsDocument22 pagesTechnologies for Printing Sensors and ElectronicspriyankaNo ratings yet
- Three Dimensional System Integration: IC Stacking Process and DesignFrom EverandThree Dimensional System Integration: IC Stacking Process and DesignNo ratings yet
- Stretchable, Washable, and Ultrathin TriboelectricDocument9 pagesStretchable, Washable, and Ultrathin Triboelectric123No ratings yet
- Mandal 2015 Semicond. Sci. Technol. 30 064003Document21 pagesMandal 2015 Semicond. Sci. Technol. 30 064003kamrul.malNo ratings yet
- ++ 2009 Fabrication of Low-Cost Electronic BiosensorsDocument9 pages++ 2009 Fabrication of Low-Cost Electronic BiosensorsDoktor transmisionesNo ratings yet
- Transparent Electronics Seminar SynopsisDocument7 pagesTransparent Electronics Seminar SynopsisAbhi BhatNo ratings yet
- IEEE Pneumatic Soft Finger ActuationDocument8 pagesIEEE Pneumatic Soft Finger Actuation莊亦鈞No ratings yet
- Machine Handling through Smart Skin TechnologyDocument4 pagesMachine Handling through Smart Skin TechnologyMin yoongiNo ratings yet
- Flexible Paper-Based Wideband Antenna For Compact-Size Iot DevicesDocument4 pagesFlexible Paper-Based Wideband Antenna For Compact-Size Iot DevicesmahalakshmiNo ratings yet
- Recent Development in Flexible Electronics: Technology ChallengeDocument2 pagesRecent Development in Flexible Electronics: Technology Challengetemp759No ratings yet
- A Capacitive Humidity Sensor Suitable FoDocument9 pagesA Capacitive Humidity Sensor Suitable Fojeanalb8No ratings yet
- J IEICE2018ReconfigurableMetalChassisDocument10 pagesJ IEICE2018ReconfigurableMetalChassisSameer SharmaNo ratings yet
- Large-Scale Fabrication of Robust Textile Triboelectric NanogeneratorsDocument9 pagesLarge-Scale Fabrication of Robust Textile Triboelectric NanogeneratorsRana Sabouni TabariNo ratings yet
- 1 s2.0 S2590123024000586 MainDocument11 pages1 s2.0 S2590123024000586 MainnancyNo ratings yet
- IEEE Transactions on Antennas and Propagation liquid sensorDocument8 pagesIEEE Transactions on Antennas and Propagation liquid sensorhelio_1972No ratings yet
- Printable Low-Cost and Exible Carbon Nanotube Buckypaper Motion SensorsDocument8 pagesPrintable Low-Cost and Exible Carbon Nanotube Buckypaper Motion SensorsSolehah OmarNo ratings yet
- Printed Antenna PDFDocument7 pagesPrinted Antenna PDFvineshnlrNo ratings yet
- Research ArticleDocument11 pagesResearch ArticlemarcpsNo ratings yet
- 8 - Soft Electronics by Inkjet Printing Metal Inks On Porous SubstratesDocument15 pages8 - Soft Electronics by Inkjet Printing Metal Inks On Porous Substratesmasum.sNo ratings yet
- Seminar Report On REDTACTONDocument34 pagesSeminar Report On REDTACTONJose Thomas Painumkal100% (1)
- Compact Polyimide Based Antennas For FleDocument6 pagesCompact Polyimide Based Antennas For FleMirela CimpanuNo ratings yet
- UyuuugDocument3 pagesUyuuug54 Andhika ramadhanuNo ratings yet
- Singh 2022 ECS Sens. Plus 1 023401Document7 pagesSingh 2022 ECS Sens. Plus 1 023401glucose glucoseNo ratings yet
- AbstractDocument2 pagesAbstractelectronautseminarsNo ratings yet
- Electronic Skin My PresentationDocument22 pagesElectronic Skin My PresentationJayalekshmi Sivan92% (24)
- 1 s2.0 S0921510715002573 MainDocument5 pages1 s2.0 S0921510715002573 Mainjamel-shamsNo ratings yet
- Nano ElectronicsDocument16 pagesNano Electronicssmartsecuritycamera senderNo ratings yet
- Study About Scope of Nano Technology in Real World Past, Present and FutureDocument3 pagesStudy About Scope of Nano Technology in Real World Past, Present and FutureSAMI UR REHMANNo ratings yet
- Tadvp 2009 2032158Document10 pagesTadvp 2009 2032158George AcostaNo ratings yet
- Adv Funct Materials - 2014 - Medina S Nchez - An Inkjet Printed Field Effect Transistor For Label Free BiosensingDocument13 pagesAdv Funct Materials - 2014 - Medina S Nchez - An Inkjet Printed Field Effect Transistor For Label Free Biosensingkamru55l.malNo ratings yet
- An Analysis of Electrode Patterns in Capacitive Touch Screen PanelsDocument5 pagesAn Analysis of Electrode Patterns in Capacitive Touch Screen PanelsQamar OmarNo ratings yet
- Stretchable ElectronicsFrom EverandStretchable ElectronicsTakao SomeyaNo ratings yet
- Understanding Energy Efficiency Benefits of Carbon Nanotube Field-Effect Transistors For Digital VLSIDocument11 pagesUnderstanding Energy Efficiency Benefits of Carbon Nanotube Field-Effect Transistors For Digital VLSIShreevatsa BhatNo ratings yet
- Magnetoelectric Current Sensor: Miniaturization and PerspectiveDocument6 pagesMagnetoelectric Current Sensor: Miniaturization and PerspectiveОлег СоколовNo ratings yet
- Optik: Original Research ArticleDocument13 pagesOptik: Original Research Articleghghg bhbbhbhNo ratings yet
- Seminar PolytronicDocument23 pagesSeminar PolytronicAbiola AkinshemoyinNo ratings yet
- Visvesvaraya Technological University: BELGAUM - 590018Document16 pagesVisvesvaraya Technological University: BELGAUM - 590018Lavanya Vaishnavi D.A.No ratings yet
- 2017 - Ink Jet Printing of Capacitive Touch SensorDocument7 pages2017 - Ink Jet Printing of Capacitive Touch SensorsamikhereNo ratings yet
- 2 - Significance of Flexible Substrates For Wearable and Implantable DevicesDocument45 pages2 - Significance of Flexible Substrates For Wearable and Implantable Devicesmasum.sNo ratings yet
- Fin Irjmets1680116934Document4 pagesFin Irjmets1680116934kasturi haseNo ratings yet
- A Blockchained Federated Learning Framework For Cognitive Computing in Industry 4.0 NetworksDocument10 pagesA Blockchained Federated Learning Framework For Cognitive Computing in Industry 4.0 NetworkssamikhereNo ratings yet
- Fan Paper in MSTDocument10 pagesFan Paper in MSTsamikhereNo ratings yet
- Air Bearing Design GuideDocument63 pagesAir Bearing Design Guidesamurai7_77No ratings yet
- Non-Chemical Weed ManagementDocument249 pagesNon-Chemical Weed ManagementsamikhereNo ratings yet
- Forensic Uses of Digital Imaging - J RussDocument205 pagesForensic Uses of Digital Imaging - J RusssamikhereNo ratings yet
- Applied Soil Mechanics With ABAQUS ApplicationsDocument398 pagesApplied Soil Mechanics With ABAQUS ApplicationsSoumya Bhattacharyya100% (2)
- Instant Download Ebook PDF Electrical Trade Practices 1st Edition PDF ScribdDocument41 pagesInstant Download Ebook PDF Electrical Trade Practices 1st Edition PDF Scribdjames.schultz763100% (40)
- The Edison Cell - Nuts & Volts MagazineDocument17 pagesThe Edison Cell - Nuts & Volts MagazineVictor Campos Sales Victor SalesNo ratings yet
- Nikola TeslaDocument4 pagesNikola TeslaRhiannon GoetzNo ratings yet
- Standard function-LR30X-AC 2-E2有Document1 pageStandard function-LR30X-AC 2-E2有any3000No ratings yet
- Bussmann Advanced Guide To SCCRsDocument11 pagesBussmann Advanced Guide To SCCRsBrian Burke Sr.No ratings yet
- R13 ReceiverDocument2 pagesR13 ReceiverTigmasu SubhadarshyNo ratings yet
- Ergoplus 400: Mig Welding (Gmaw)Document2 pagesErgoplus 400: Mig Welding (Gmaw)Стефан АнтонићNo ratings yet
- Measuring Power in Three Circuits Using Two Wattmeter MethodDocument6 pagesMeasuring Power in Three Circuits Using Two Wattmeter MethodAnthony GregoryNo ratings yet
- Manual Programacion VARIADOR AquavarDocument152 pagesManual Programacion VARIADOR AquavarCarlos Ventura100% (1)
- VS-40TPS... - M3 Series: Vishay SemiconductorsDocument8 pagesVS-40TPS... - M3 Series: Vishay SemiconductorsDaniel ConstantinNo ratings yet
- Topics Covered in Introduction To Batteries The Voltaic Cell Common Types of Primary Cells Lead-Acid Wet Cell Additional Types of Secondary CellsDocument32 pagesTopics Covered in Introduction To Batteries The Voltaic Cell Common Types of Primary Cells Lead-Acid Wet Cell Additional Types of Secondary CellsArvind VNo ratings yet
- Laser-guided door opener circuit overviewDocument9 pagesLaser-guided door opener circuit overviewsekhar469No ratings yet
- Leveraging MATLAB-Simulink in Building Battery SOH Estimation PipelinesDocument22 pagesLeveraging MATLAB-Simulink in Building Battery SOH Estimation Pipelinestejas dhanagareNo ratings yet
- Temp SensorsDocument17 pagesTemp Sensorscoolrsk17No ratings yet
- COMMSCOPE CAT6 - CAT5E Patch PanelDocument3 pagesCOMMSCOPE CAT6 - CAT5E Patch PanelZulkifle Norul NizaNo ratings yet
- Sony dsr-45 45p (ET)Document305 pagesSony dsr-45 45p (ET)Raul Sanchez Peralta100% (1)
- LSQ5 Man-0964 V3.1.0 enDocument48 pagesLSQ5 Man-0964 V3.1.0 enDiego Mondragon100% (1)
- Mellesgriot Photodiode 2Document1 pageMellesgriot Photodiode 2norbertscribdNo ratings yet
- Lighting Lighting: Master Ledtube Universal T8Document3 pagesLighting Lighting: Master Ledtube Universal T8haluuNo ratings yet
- Lec 11Document17 pagesLec 11Fardin Jamal FayeedNo ratings yet
- What Are Through Holes On A PCBDocument15 pagesWhat Are Through Holes On A PCBjackNo ratings yet
- ASCO™ Solenoid Valves 356: Features & BenefitsDocument10 pagesASCO™ Solenoid Valves 356: Features & BenefitssrushtiNo ratings yet
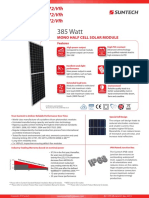
- Suntech HyPro STP385S 72 VFH MC4 385 380 375 2GDocument2 pagesSuntech HyPro STP385S 72 VFH MC4 385 380 375 2GRaul SantosNo ratings yet
- Switching Behavior Improvement of Insulated Gate Controlled DevicesDocument9 pagesSwitching Behavior Improvement of Insulated Gate Controlled DevicesOsman T.No ratings yet
- RX25GV1NB RX35GV1NB FTX25GV1NB FTX35GV1NB PDFDocument174 pagesRX25GV1NB RX35GV1NB FTX25GV1NB FTX35GV1NB PDFMalay K GhoshNo ratings yet
- Assignment 1 EED203Document3 pagesAssignment 1 EED203sagrvNo ratings yet
- Current Source InverterDocument16 pagesCurrent Source Inverterjp-sharma100% (1)
- Schedule of Loads and Computation SampleDocument5 pagesSchedule of Loads and Computation SampleVhilly JheykNo ratings yet
- MITSUBISHI Q Serial Communication Module User's ManualDocument396 pagesMITSUBISHI Q Serial Communication Module User's ManualShakti SankiNo ratings yet
- Chapter 07 TransformerDocument48 pagesChapter 07 Transformerdewidar1234100% (3)