You might also like
- Creating a One-Piece Flow and Production Cell: Just-in-time Production with Toyota’s Single Piece FlowFrom EverandCreating a One-Piece Flow and Production Cell: Just-in-time Production with Toyota’s Single Piece FlowRating: 4 out of 5 stars4/5 (1)
- A Systematized Approach To Obtain Dependable Controller Specifications For Hybrid PlantsDocument20 pagesA Systematized Approach To Obtain Dependable Controller Specifications For Hybrid PlantsVăn Nghĩa NguyễnNo ratings yet
- Practical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneFrom EverandPractical, Made Easy Guide To Building, Office And Home Automation Systems - Part OneNo ratings yet
- Study of The Automatic Filling and Capping System, Using Grafcet-Gemma-Plc and Wincc FlexibleDocument9 pagesStudy of The Automatic Filling and Capping System, Using Grafcet-Gemma-Plc and Wincc FlexibleTrang NguyễnNo ratings yet
- Automation FMSDocument164 pagesAutomation FMSSudhakar FormworkNo ratings yet
- GF SP DCDS Jun 2007Document6 pagesGF SP DCDS Jun 2007Kien Nguyen TrungNo ratings yet
- Reliability-Centered Maintenance Planning Based On Computer-Aided FMEADocument7 pagesReliability-Centered Maintenance Planning Based On Computer-Aided FMEAAhmed El-FayoomiNo ratings yet
- Herramienta de Cominucacion y DiagnosticoDocument11 pagesHerramienta de Cominucacion y Diagnosticoelias aguirreNo ratings yet
- Automation in Manufacturing - 2nd Sem - MTech - MSE - Module 1Document58 pagesAutomation in Manufacturing - 2nd Sem - MTech - MSE - Module 1Jayasmita DasNo ratings yet
- Automation & NC Machines GuideDocument164 pagesAutomation & NC Machines GuideRajesh ShahNo ratings yet
- Automation in ManufacturingDocument128 pagesAutomation in ManufacturingMsNo ratings yet
- FMEA Applications Machinery FMEA: Continued On Next PageDocument10 pagesFMEA Applications Machinery FMEA: Continued On Next Pagenelson.rodriguezm6142100% (1)
- Integrated Turbine-Compressor ControlDocument8 pagesIntegrated Turbine-Compressor ControlAbdul RohmanNo ratings yet
- AIM All Units - 3122018Document91 pagesAIM All Units - 3122018Čhęťãń ĶNo ratings yet
- The Calculation Analysis of Total Productive Maintenance (TPM) On The Plumatex FFS894 Machine Using The Overall Equipment Effectiveness (OEE) Method at PT - Xyz Pharmaceutical CompanyDocument9 pagesThe Calculation Analysis of Total Productive Maintenance (TPM) On The Plumatex FFS894 Machine Using The Overall Equipment Effectiveness (OEE) Method at PT - Xyz Pharmaceutical CompanyJheison QuintoNo ratings yet
- BDocument3 pagesBrodrurenNo ratings yet
- The Prime Oee ManagerDocument23 pagesThe Prime Oee ManagertruongngvNo ratings yet
- A R C H I V e o F S I D Maintenance Management Decision Model For Preventive Maintenance Strategy On Production EquipmentDocument14 pagesA R C H I V e o F S I D Maintenance Management Decision Model For Preventive Maintenance Strategy On Production EquipmentLASER LION100% (1)
- Abnormal Situation Management: PracticeDocument20 pagesAbnormal Situation Management: Practicehelloworld1368No ratings yet
- Types of Production Automation SystemsDocument90 pagesTypes of Production Automation SystemsSanketh SNo ratings yet
- Chapter Six - : Manufacturing SystemsDocument25 pagesChapter Six - : Manufacturing SystemsAli BandarNo ratings yet
- Data ProjectDocument16 pagesData ProjectamyNo ratings yet
- SEMESTER 1 (2020/2021) SMJE 4293 Assignment 1: LECTURES: Profesor Madya DR Mohd Fauzi Bin OthmanDocument7 pagesSEMESTER 1 (2020/2021) SMJE 4293 Assignment 1: LECTURES: Profesor Madya DR Mohd Fauzi Bin OthmanBrian LaiNo ratings yet
- 11 CimDocument6 pages11 Cimbanne akshayNo ratings yet
- Chapter1-Introduction To Automation PDFDocument29 pagesChapter1-Introduction To Automation PDFAbdul Razzi86% (7)
- mc24 Kompend e PDFDocument1,498 pagesmc24 Kompend e PDFthksantanaNo ratings yet
- Control & Instrumentation 2Document0 pagesControl & Instrumentation 2SHIVAJI CHOUDHURY100% (3)
- Unit 1 Introduction To AutomationDocument19 pagesUnit 1 Introduction To Automationshadow.thevolcanoNo ratings yet
- AIM Notes Unit 1Document45 pagesAIM Notes Unit 1Vikash PrajapatiNo ratings yet
- 160HDocument27 pages160Hmtocbv100% (3)
- GE FAnucDocument248 pagesGE FAnucMohamed AlkharashyNo ratings yet
- Chapter 4 - Lecture Notes PDFDocument23 pagesChapter 4 - Lecture Notes PDFHerna Kartika AfandiNo ratings yet
- Failure Mode Analysis Guide - FMEA Process OverviewDocument19 pagesFailure Mode Analysis Guide - FMEA Process OverviewpatnaikpsNo ratings yet
- 861-031MANE Version 7Document1 page861-031MANE Version 7e3965No ratings yet
- AR - Module-1 Q & A (SEE)Document8 pagesAR - Module-1 Q & A (SEE)Simply AkashNo ratings yet
- Index: Sr. No. Subject Page NoDocument20 pagesIndex: Sr. No. Subject Page NoNadeem TadviNo ratings yet
- Analysis of Total Productive MaintenanceDocument7 pagesAnalysis of Total Productive MaintenancehuynhthimytienbkNo ratings yet
- Cycle Time Calculation-Unit - 12 - Automated - Manufacturing - Systems PDFDocument34 pagesCycle Time Calculation-Unit - 12 - Automated - Manufacturing - Systems PDFzainikamal1975No ratings yet
- Ghrce - Final Aip Lab Manual (Viii Sem)Document89 pagesGhrce - Final Aip Lab Manual (Viii Sem)Jyotiraman De100% (1)
- FADECDocument5 pagesFADECdata16161616No ratings yet
- Using The 4C-8195 Control Service Tool (0374, 0599, 0709, 7490)Document12 pagesUsing The 4C-8195 Control Service Tool (0374, 0599, 0709, 7490)Lejandro100% (1)
- Automation in Production Systems PDFDocument10 pagesAutomation in Production Systems PDFMrRulesGta0% (1)
- Plc-1-3-130228062613-Phpapp02 Penting PDFDocument44 pagesPlc-1-3-130228062613-Phpapp02 Penting PDFsasivarma791354No ratings yet
- C Group 009Document57 pagesC Group 009jairoberNo ratings yet
- 7 FMEA NewDocument38 pages7 FMEA NewrakeshNo ratings yet
- Mstr12xl ES 20Document22 pagesMstr12xl ES 20abelNo ratings yet
- AutT MotionDocument3 pagesAutT MotionSambath JoyNo ratings yet
- Holistic Approach to Optimising Industrial Crushing CircuitsDocument5 pagesHolistic Approach to Optimising Industrial Crushing CircuitspaulocouceiroNo ratings yet
- Ijmet: International Journal of Mechanical Engineering and Technology (Ijmet)Document8 pagesIjmet: International Journal of Mechanical Engineering and Technology (Ijmet)IAEME PublicationNo ratings yet
- An Automatic Tuning Methodology For A Unified Dead-Time Compensator (2014)Document12 pagesAn Automatic Tuning Methodology For A Unified Dead-Time Compensator (2014)René PereiraNo ratings yet
- Instructions of Laser Welding SoftwareDocument17 pagesInstructions of Laser Welding SoftwareBob FazrilNo ratings yet
- Modeling An Oil Drilling Rig Total Productive ...Document10 pagesModeling An Oil Drilling Rig Total Productive ...cpmrNo ratings yet
- Implementation of Isa S88.01 Standard Into An Automated ProcessDocument5 pagesImplementation of Isa S88.01 Standard Into An Automated ProcessLAURA DAYANA ROCHA PLAZASNo ratings yet
- PackML Definition Document V3.0 FinalDocument22 pagesPackML Definition Document V3.0 FinalValente Ivan CortesNo ratings yet
- Ijmet: ©iaemeDocument9 pagesIjmet: ©iaemeIAEME PublicationNo ratings yet
- 7-Speed Direct Shift Gearbox (DSG - 0AM) - Ross-Tech WikiDocument3 pages7-Speed Direct Shift Gearbox (DSG - 0AM) - Ross-Tech WikiVuk Krstajic100% (1)
- CIM SYSTEM FOR MANUFACTURING EDUCATIONDocument4 pagesCIM SYSTEM FOR MANUFACTURING EDUCATIONankushkapoor2003No ratings yet
- Flexible Manufacturing System Seminar ReportDocument18 pagesFlexible Manufacturing System Seminar ReportPranav Pandey0% (1)
- 3 2 2 P 604764a9e8de5 FileDocument13 pages3 2 2 P 604764a9e8de5 FileKunal AhiwaleNo ratings yet
- How VFDs Improve Cane Mill Efficiency and Reduce Energy CostsDocument5 pagesHow VFDs Improve Cane Mill Efficiency and Reduce Energy CostsEdison EstrellaNo ratings yet
- High-Impact Talent Analytics PDFDocument2 pagesHigh-Impact Talent Analytics PDFvaibhavjssNo ratings yet
- Service Bulletin: Fuel Injection PumpDocument15 pagesService Bulletin: Fuel Injection PumpKrunoslavNo ratings yet
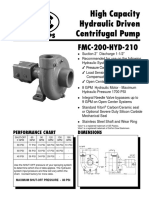
- FMC 200 Hyd 210Document2 pagesFMC 200 Hyd 210Ruben SaccoNo ratings yet
- Sprinkler Protection Guidance For Lithium-Ion Based Energy Storag e SystemsDocument46 pagesSprinkler Protection Guidance For Lithium-Ion Based Energy Storag e SystemsAlexNo ratings yet
- DownloadDocument2 pagesDownloadapextelecomsaNo ratings yet
- Finding The Right International MixDocument3 pagesFinding The Right International MixКсения БорисоваNo ratings yet
- 056-123 Simulation Injection TestingDocument6 pages056-123 Simulation Injection TestingRoxanneNo ratings yet
- Consultancy Dossier 1Document4 pagesConsultancy Dossier 1Ghita NaaimyNo ratings yet
- Does Not Export The Right Colors by The Bodymovin in The Gradient Issue #1440 Airbnblottie-Web GitHubDocument1 pageDoes Not Export The Right Colors by The Bodymovin in The Gradient Issue #1440 Airbnblottie-Web GitHubAbirama ShankaraNo ratings yet
- Jobs-In-Webduniaweb-Portal/ Telugu Translation Jobs in Webdunia (Web Portal)Document3 pagesJobs-In-Webduniaweb-Portal/ Telugu Translation Jobs in Webdunia (Web Portal)Rangothri Sreenivasa SubramanyamNo ratings yet
- RTD1509-004 - GXR-SD - Installation Guide2580 - UnlockedDocument51 pagesRTD1509-004 - GXR-SD - Installation Guide2580 - UnlockedMarcus RiveraNo ratings yet
- Success Built On Experience: Ongoing Development of Radial Forging TechnologyDocument2 pagesSuccess Built On Experience: Ongoing Development of Radial Forging TechnologyemregnesNo ratings yet
- Soil Mechanics I Cee 305: 2.0 Consistency Limit (Atterberge Limit)Document6 pagesSoil Mechanics I Cee 305: 2.0 Consistency Limit (Atterberge Limit)ABUBAKAR SANI HABIBUNo ratings yet
- Ultramatch Pro Src2496: User ManualDocument16 pagesUltramatch Pro Src2496: User ManualLuka TrengovskiNo ratings yet
- Employee Payroll System ProjectDocument21 pagesEmployee Payroll System ProjectZeeshan Hyder BhattiNo ratings yet
- Fundamentals of Mimo Wireless CommunicationDocument1 pageFundamentals of Mimo Wireless CommunicationshailiayushNo ratings yet
- HPA4 Service ManualDocument7 pagesHPA4 Service ManualMarcelo ArayaNo ratings yet
- Study On Electricity Distribution Substation Operation Amp Maintenance of DescoDocument46 pagesStudy On Electricity Distribution Substation Operation Amp Maintenance of DescoJayant KoshtiNo ratings yet
- Annex E - Financial Offer Form - FinalDocument3 pagesAnnex E - Financial Offer Form - FinalMerito MhlangaNo ratings yet
- TSA Power Amp ManualDocument52 pagesTSA Power Amp ManualGiovanni CatalaniNo ratings yet
- M I M Nafrees QSDocument2 pagesM I M Nafrees QSnafreesmimNo ratings yet
- Anexo 1 - Generac SG625-PG563 PDFDocument6 pagesAnexo 1 - Generac SG625-PG563 PDFJuly E. Maldonado M.No ratings yet
- MATH 103 - Thinking Mathematically I: Gesen @bilkent - Edu.trDocument2 pagesMATH 103 - Thinking Mathematically I: Gesen @bilkent - Edu.trVitto e Leo FerragniNo ratings yet
- Wired 6.0 - Problem Statement - HRDocument3 pagesWired 6.0 - Problem Statement - HRKaram Singh Giani H21084No ratings yet
- MATH 5 Worksheet Q1Week 1 4Document6 pagesMATH 5 Worksheet Q1Week 1 4Criza Bill LauNo ratings yet
- UMN EE 1301 Sample Problems and Solutions for Quiz 1Document14 pagesUMN EE 1301 Sample Problems and Solutions for Quiz 1ganxx019No ratings yet
- Statement of Account: State Bank of IndiaDocument6 pagesStatement of Account: State Bank of Indiashinde rushiNo ratings yet
- Tendernotice MsrdcDocument2 pagesTendernotice MsrdcBenjamin JeyakumarNo ratings yet
- Vibrating ScreensDocument6 pagesVibrating Screensvarun_0512933No ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)