You might also like
- 3rd Sem SyllabusDocument33 pages3rd Sem SyllabusSUHOTRA guptaNo ratings yet
- Semester2015 2016Document37 pagesSemester2015 2016QqNo ratings yet
- B.tech Mechatronics PDFDocument106 pagesB.tech Mechatronics PDFSandeep KotaNo ratings yet
- B.tech Mechatronics PDFDocument106 pagesB.tech Mechatronics PDFSandeep KotaNo ratings yet
- Department of Mechanical EngineeringDocument5 pagesDepartment of Mechanical EngineeringCH AHMEDNo ratings yet
- Course Outline - Electrical Machines - Feb 7Document5 pagesCourse Outline - Electrical Machines - Feb 7Ahad MunawarNo ratings yet
- Neduet SyllabusDocument38 pagesNeduet SyllabusMuhammad SaimNo ratings yet
- Course Contents of 4th Semester of B.E Civil Egineering - 0Document10 pagesCourse Contents of 4th Semester of B.E Civil Egineering - 0Rashid AliNo ratings yet
- 3.1 Fluid Mechanics: //Hameed/Official/Syllabuspdf/Civil-3Sem PDFDocument32 pages3.1 Fluid Mechanics: //Hameed/Official/Syllabuspdf/Civil-3Sem PDFhyderNo ratings yet
- Mech Final Syl Btech NitaDocument47 pagesMech Final Syl Btech NitaAngad SinghNo ratings yet
- Civil Sem 3Document30 pagesCivil Sem 3malik mohsinNo ratings yet
- Fluid Mechanics (BTME-301-18)Document13 pagesFluid Mechanics (BTME-301-18)Surjit Kumar GandhiNo ratings yet
- Rtmnu Mechanical Engineering SyllabusDocument85 pagesRtmnu Mechanical Engineering SyllabusShobit JainNo ratings yet
- B.tech 4th Sem MechanicalDocument8 pagesB.tech 4th Sem MechanicalRahul KumarNo ratings yet
- IIT Kharagpur M.tech MD SyllabusDocument5 pagesIIT Kharagpur M.tech MD SyllabussyampnaiduNo ratings yet
- First Year First SemesterDocument15 pagesFirst Year First SemesterAditya GainNo ratings yet
- ME8594 Course PlanDocument8 pagesME8594 Course Planmanoj1316kumar_63152No ratings yet
- 3ME05 Fluid Mechanics: Course Learning ObjectivesDocument3 pages3ME05 Fluid Mechanics: Course Learning Objectivesgotu123No ratings yet
- MPSC Lecturer Applied Mechanics PolytechnicDocument3 pagesMPSC Lecturer Applied Mechanics PolytechnicD JNo ratings yet
- An Overview of Probabilistic Aspects of Harmonics: State of The Art and New DevelopmentsDocument4 pagesAn Overview of Probabilistic Aspects of Harmonics: State of The Art and New Developmentsfranchisca9999No ratings yet
- Fluid MechanicsDocument3 pagesFluid MechanicsVipin KallingalNo ratings yet
- Topic:: History and Philosophy of Computational Fluid DynamicsDocument16 pagesTopic:: History and Philosophy of Computational Fluid DynamicsSHAAD SARWAR MOHAMMEDNo ratings yet
- Syllabus: II YearDocument12 pagesSyllabus: II YearSheezan KhanNo ratings yet
- Cyclic Plasticity Behaviors of Steam Turbine Rotor Subjected To Cyclic Thermal and Mechanical LoadsDocument30 pagesCyclic Plasticity Behaviors of Steam Turbine Rotor Subjected To Cyclic Thermal and Mechanical Loadsomar900314No ratings yet
- Mechanical Accaccelero-MeterDocument15 pagesMechanical Accaccelero-MeterMjbNo ratings yet
- 50 Jalil Ul Qadar Ulama by Hafiz M Akbar BukhariDocument3 pages50 Jalil Ul Qadar Ulama by Hafiz M Akbar BukhariMuhammad Aqeel Anwar KambohNo ratings yet
- Chapter 01Document42 pagesChapter 01Dominique Serge AmbassaNo ratings yet
- Prerequisites Automation Control EngineeringDocument3 pagesPrerequisites Automation Control EngineeringFombu MuluhNo ratings yet
- 1 Introduction Lecturenotes 1Document17 pages1 Introduction Lecturenotes 1akhilesh120No ratings yet
- Mech SyllabusDocument130 pagesMech SyllabuskrishnaNo ratings yet
- Integral Relation For A Control Volume (Part 1)Document15 pagesIntegral Relation For A Control Volume (Part 1)Muhammad Amni FitriNo ratings yet
- Electrical Machines OBE, Clo Plo.Document4 pagesElectrical Machines OBE, Clo Plo.Awais KhanNo ratings yet
- Mechanical Engineering: Syllabus of Undergraduate Degree CourseDocument15 pagesMechanical Engineering: Syllabus of Undergraduate Degree CourseGECJNo ratings yet
- B.Tech 6th Sem ME Final 1Document14 pagesB.Tech 6th Sem ME Final 1World TodayNo ratings yet
- Nepal Telecom: - LG G+ 124 +U Dalgwt CG' 'LR - 5Document4 pagesNepal Telecom: - LG G+ 124 +U Dalgwt CG' 'LR - 5AlamNo ratings yet
- 4th Semester SyllabusDocument14 pages4th Semester Syllabus507 20L SK DarainNo ratings yet
- MIST MSC-ME SyllabusDocument30 pagesMIST MSC-ME SyllabusSajidNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- FMH SyllabusDocument4 pagesFMH SyllabusSnehal YagnikNo ratings yet
- 3 Semester Mechanical Engineering: Course No. Course Name Credits L T PDocument12 pages3 Semester Mechanical Engineering: Course No. Course Name Credits L T PHome KumarNo ratings yet
- Civil Engineering 3 S: EmesterDocument79 pagesCivil Engineering 3 S: Emesterarun1cmNo ratings yet
- Ues011 Thermo-Fluids: Revised Scheme Approved by The 90 Meeting of The Senate (May 30, 2016)Document2 pagesUes011 Thermo-Fluids: Revised Scheme Approved by The 90 Meeting of The Senate (May 30, 2016)vndeshmukhNo ratings yet
- Course Code Course Name L-T-P-Credits Year of CE203 Fluid Mechanics - I 3-1-0-4 2016Document3 pagesCourse Code Course Name L-T-P-Credits Year of CE203 Fluid Mechanics - I 3-1-0-4 2016AnonymousNo ratings yet
- DOM Course FileDocument14 pagesDOM Course FileNdvs PrasadNo ratings yet
- EllisseDocument8 pagesEllissenavarromerdaNo ratings yet
- 2018 Syllabus 7th SEMDocument25 pages2018 Syllabus 7th SEM18ME045No ratings yet
- Presented By: Rajshahi University of Engineering & TechnologyDocument24 pagesPresented By: Rajshahi University of Engineering & TechnologyShuvendu Paul ShuvoNo ratings yet
- Computational Fluid DynamicsDocument12 pagesComputational Fluid DynamicsckNo ratings yet
- Recruitment of Engineer (S/G - E1 & E2) at HRRL: Computer Based Test (CBT) : Paper Pattern and SyllabusDocument10 pagesRecruitment of Engineer (S/G - E1 & E2) at HRRL: Computer Based Test (CBT) : Paper Pattern and SyllabusAman PalNo ratings yet
- Semester IiiDocument178 pagesSemester IiiAkshil ShahNo ratings yet
- Mechanical Engineering: Syllabus of Undergraduate Degree CourseDocument26 pagesMechanical Engineering: Syllabus of Undergraduate Degree CourseShort Term Course0% (1)
- Syllabus PDFDocument4 pagesSyllabus PDFAshwinNo ratings yet
- Civil - Sem - 3Document28 pagesCivil - Sem - 3Garima RajdevaNo ratings yet
- Fluid Mechanics & HydraulicsDocument4 pagesFluid Mechanics & HydraulicsHiral GamitNo ratings yet
- Syllabus BE RevisedDocument40 pagesSyllabus BE RevisedJayesh SawarkarNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Hydrothermal Analysis in Engineering Using Control Volume Finite Element MethodFrom EverandHydrothermal Analysis in Engineering Using Control Volume Finite Element MethodNo ratings yet
- Notches and WeirsDocument15 pagesNotches and WeirsolescootNo ratings yet
- F. M. 1Document3 pagesF. M. 1Aashish PardeshiNo ratings yet
- Le Chatelier's Principle - WikipediaDocument36 pagesLe Chatelier's Principle - WikipediaLiza RellamaNo ratings yet
- Beam Column ConnectionDocument2 pagesBeam Column ConnectionHAZIRACFS SURATNo ratings yet
- Fem 9.341Document6 pagesFem 9.341rafael1978No ratings yet
- Calculation Before A Cement JobDocument4 pagesCalculation Before A Cement Jobreza khNo ratings yet
- Basic Principles of Flight PDFDocument36 pagesBasic Principles of Flight PDFAttakaththi DineshNo ratings yet
- Lab Report 1Document11 pagesLab Report 1Haziq HakimiNo ratings yet
- Ring Formation in Rotary KilnsDocument30 pagesRing Formation in Rotary Kilnsmohamed ElsayedNo ratings yet
- Tensile TestDocument12 pagesTensile Testmeysam1215100% (3)
- AASHTO M 320 Asphalt PGDocument7 pagesAASHTO M 320 Asphalt PGDavid MazdaNo ratings yet
- Physical and Mechanical Properties of Dental MaterialsDocument104 pagesPhysical and Mechanical Properties of Dental Materialsdiwakar2100% (1)
- Atterberg's Limits: College of Engineering Civil Engineering Department Soil NCE 412Document29 pagesAtterberg's Limits: College of Engineering Civil Engineering Department Soil NCE 412MarkNo ratings yet
- Les Photos de Matérieles de ForagesDocument18 pagesLes Photos de Matérieles de Foragesعبد العزيز مروى100% (1)
- 2006 Barton Rock Quality Seismic Velocity PDFDocument756 pages2006 Barton Rock Quality Seismic Velocity PDFHui LuNo ratings yet
- Effects of Liquefaction On StructuresDocument38 pagesEffects of Liquefaction On Structurestusharghosh86% (14)
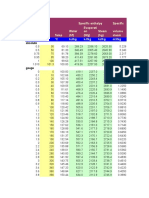
- Steam Tables - MetricDocument4 pagesSteam Tables - MetricUdhayakumar VenkataramanNo ratings yet
- A Textbook of Machine Design by R.S.khurMI and J.K.guptA (Tortuka)Document1 pageA Textbook of Machine Design by R.S.khurMI and J.K.guptA (Tortuka)lastjohn100% (1)
- Civil Engineering MCQDocument19 pagesCivil Engineering MCQSuhail RazaNo ratings yet
- Ans ExDocument19 pagesAns ExGanapathy VigneshNo ratings yet
- Simulation of Ow Meter Calibration Factors For Various Installation EffectsDocument11 pagesSimulation of Ow Meter Calibration Factors For Various Installation Effectstagne simo rodrigueNo ratings yet
- To Determine The Specific Heat Capacity of Solid and Liquid by Method of MixturesDocument5 pagesTo Determine The Specific Heat Capacity of Solid and Liquid by Method of MixturesVikash Kumar Singh0% (4)
- 09 Worksheet 1Document1 page09 Worksheet 1Jr YansonNo ratings yet
- Ref Compound CycleDocument20 pagesRef Compound CycleMayank RawatNo ratings yet
- Ae 2301 - Flight Dynamics V Sem Question Bank Part ADocument3 pagesAe 2301 - Flight Dynamics V Sem Question Bank Part ASaravanan AtthiappanNo ratings yet
- Chapter # 3Document64 pagesChapter # 3Pharo TotNo ratings yet
- LN13 PDFDocument54 pagesLN13 PDFelty TanNo ratings yet
- Physics For Scientists and Engineers, With Modern Physics, 4 EditionDocument56 pagesPhysics For Scientists and Engineers, With Modern Physics, 4 EditionNur SyahirahNo ratings yet
- MODULE1 - 134 Prents 1 1 3 PDFDocument113 pagesMODULE1 - 134 Prents 1 1 3 PDFAlesther Mariano100% (1)
- Properties of MatterDocument117 pagesProperties of MatterKarren Ferrer-Mora Handayan100% (1)