You might also like
- پیشرفته 2Document21 pagesپیشرفته 2sobhanNo ratings yet
- E2 1Document11 pagesE2 1Ali RahimiNo ratings yet
- آموزش خواص مکانیکی بخش اولDocument28 pagesآموزش خواص مکانیکی بخش اولReza TaraminezhadNo ratings yet
- آشنائی با انواع ستون های ساختمانDocument19 pagesآشنائی با انواع ستون های ساختمانRaihanNo ratings yet
- Protez 2nd2Document22 pagesProtez 2nd2mehrshadNo ratings yet
- BarBar QsDocument47 pagesBarBar Qsymm71300No ratings yet
- فزیکpdfDocument24 pagesفزیکpdfsaniamohmand211No ratings yet
- DENSITOMETRYDocument2 pagesDENSITOMETRYxsarax928No ratings yet
- آنالیز مهارت بارفیکیسDocument76 pagesآنالیز مهارت بارفیکیسمعین محمدیNo ratings yet
- 4 409307080478949707Document114 pages4 409307080478949707Ali zeinabiNo ratings yet
- RPD دفتر پروتز پارسیل کارگاه عملی دکترسازور 2Document40 pagesRPD دفتر پروتز پارسیل کارگاه عملی دکترسازور 2dr.sazvarNo ratings yet
- بلبرینگDocument1 pageبلبرینگarizi karoomiNo ratings yet
- ارائه ترمیمDocument48 pagesارائه ترمیمRazyNo ratings yet
- Bearing Analysis Using AnsysDocument6 pagesBearing Analysis Using AnsysMax Kuriakose MadiathNo ratings yet
- آناتومی سطحیDocument65 pagesآناتومی سطحیVahid KhaveNo ratings yet
- ارتو۳- جلسه ۱ - دکتر حسن زادهDocument8 pagesارتو۳- جلسه ۱ - دکتر حسن زادهdoctorsoha.shNo ratings yet
- جزوه اسکلتی (جلسه پنجمDocument20 pagesجزوه اسکلتی (جلسه پنجمokhtay811No ratings yet
- راهنمای کشوری پیشگیری از عقرب گزیدگی و درمان آنDocument44 pagesراهنمای کشوری پیشگیری از عقرب گزیدگی و درمان آنsoroushsadeghi1995No ratings yet
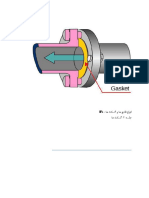
- انواع فلنج ها و گسکت هاDocument34 pagesانواع فلنج ها و گسکت هاAli SaghafiNo ratings yet
- تفسیر رادیو گرافی و ام ار ایDocument16 pagesتفسیر رادیو گرافی و ام ار ایabbasNo ratings yet
- فصل دومDocument20 pagesفصل دومAsifNo ratings yet
- فیزیک 1- تمرین سری 5- 1401Document4 pagesفیزیک 1- تمرین سری 5- 1401atila alizadehNo ratings yet
- جزوه جلسه 7 اندو- حوادث حین درمانDocument12 pagesجزوه جلسه 7 اندو- حوادث حین درمانNima DarabiNo ratings yet
- سوالات تشریحیDocument11 pagesسوالات تشریحیMohamad Reza SazvarNo ratings yet
- گزارش ریل - ویرایش دومDocument29 pagesگزارش ریل - ویرایش دومmoNo ratings yet
- 3- آيين نگارشDocument28 pages3- آيين نگارشمحمدکاظم شریفیNo ratings yet
- آناتومی ترم 1Document96 pagesآناتومی ترم 1arya85286No ratings yet
- شناسنامه پین بار و پیوت تبصره ایDocument20 pagesشناسنامه پین بار و پیوت تبصره ایmeshghi8888No ratings yet
- Elevators & Forceps: Yahya FayazDocument24 pagesElevators & Forceps: Yahya FayazYahya FayazNo ratings yet
- InstrumentsDocument18 pagesInstrumentszhyhhNo ratings yet
- Pdfjoiner 1Document132 pagesPdfjoiner 1mohammadrodgar123No ratings yet
- جلسه 11Document2 pagesجلسه 11bit starNo ratings yet
- Anatomi OmoomiDocument135 pagesAnatomi Omoomii9jjvuietnNo ratings yet
- Anatomi Omoomi FullDocument135 pagesAnatomi Omoomi Fullmohammadteymoori80No ratings yet
- RCTDocument56 pagesRCTNabi FaraziNo ratings yet
- CoringDocument33 pagesCoringhamidNo ratings yet
- 1391 QuestionsDocument20 pages1391 Questionsشوکت محمديNo ratings yet
- تداخلسنج مایکلسونDocument7 pagesتداخلسنج مایکلسونSorushaminfarNo ratings yet
- سیمینار داخله دندان.Document22 pagesسیمینار داخله دندان.Jamshid SadeqiNo ratings yet
- Muscular Presentation of Anatomy First Class For Rokhan UniversityDocument113 pagesMuscular Presentation of Anatomy First Class For Rokhan UniversityToorialai Amin100% (1)
- آناتومی کلیه 1Document14 pagesآناتومی کلیه 1caro omidiNo ratings yet
- ستاپ های معاملاتی نورا بیستراDocument4 pagesستاپ های معاملاتی نورا بیستراimanNo ratings yet
- کینزیولوژی جلسه اولDocument20 pagesکینزیولوژی جلسه اولAlexthunderNo ratings yet
- 13. .. - ساخت گلنگدن تک تک تیر ? کالیبر 50 ??✋ .Document8 pages13. .. - ساخت گلنگدن تک تک تیر ? کالیبر 50 ??✋ .Abas NjarkhatirNo ratings yet
- Price ActionDocument24 pagesPrice ActionMahan KeshavarzrahbarNo ratings yet
- جذور و کانال دندان های سفلیDocument8 pagesجذور و کانال دندان های سفلیNabi FaraziNo ratings yet
- بردار خامDocument17 pagesبردار خامfnaz1029No ratings yet
- SpineDocument166 pagesSpineJonathan LaneNo ratings yet
- خلاصه کل دروس تعوری مربی گریDocument10 pagesخلاصه کل دروس تعوری مربی گریdeveloper1376No ratings yet
- اتصالات فولادیDocument24 pagesاتصالات فولادیMahshid AlaeiNo ratings yet
- ایمنی حمل و نقل و جابجائی بارDocument39 pagesایمنی حمل و نقل و جابجائی بارAfshin MahdaviNo ratings yet
- Soalemtehani Zist 11 Fasl3 NomreyarDocument2 pagesSoalemtehani Zist 11 Fasl3 Nomreyariamiram85No ratings yet
- 230PI-045-Piping Design SpecificationDocument15 pages230PI-045-Piping Design SpecificationReza koohi faeghNo ratings yet
- کینزیولوژی جلسه چهارمDocument14 pagesکینزیولوژی جلسه چهارمAlexthunderNo ratings yet
- DocumentDocument1 pageDocumentSanaz RastegarNo ratings yet
- PositionDocument34 pagesPositiondorna.gh90No ratings yet
- Endo Access (MUMS)Document23 pagesEndo Access (MUMS)aftscrNo ratings yet
- سازه های فولادی - بخش دومDocument19 pagesسازه های فولادی - بخش دومmohammad rezaiiNo ratings yet
- طراحي اجزا 2 PDFDocument63 pagesطراحي اجزا 2 PDFdavoodsalimiNo ratings yet