You might also like
- Polar Coordinate System - WikipediaDocument25 pagesPolar Coordinate System - WikipediaSatya Ranjan PadhiNo ratings yet
- Multilinear Functions Of Direction And Their Uses In Differential GeometryFrom EverandMultilinear Functions Of Direction And Their Uses In Differential GeometryNo ratings yet
- Polar Coordinate System: AzimuthDocument16 pagesPolar Coordinate System: AzimuthKrishanu ModakNo ratings yet
- Polar Coordinate System - Wikipedia, The Free EncyclopediaDocument13 pagesPolar Coordinate System - Wikipedia, The Free EncyclopediabmxengineeringNo ratings yet
- Polar Coordinate SystemDocument13 pagesPolar Coordinate SystemMce Reg0% (1)
- Cylindrical Coordinate System: DefinitionDocument11 pagesCylindrical Coordinate System: DefinitionMujtaba KhanNo ratings yet
- Spherical Coordinate System: Angle, or Inclination AngleDocument11 pagesSpherical Coordinate System: Angle, or Inclination AngleDimitrios Christos SarvanisNo ratings yet
- Spherical CoordinatesDocument7 pagesSpherical CoordinatesEdvardo PagvaiNo ratings yet
- Spherical Coordinate SystemDocument8 pagesSpherical Coordinate Systemruman ahmadNo ratings yet
- Spherical Coordinate System and Cylindrical Coordinate System and Its Transformation Into PolarDocument10 pagesSpherical Coordinate System and Cylindrical Coordinate System and Its Transformation Into PolarRohitNo ratings yet
- Solid Angle - Wikipedia, The Free EncyclopediaDocument8 pagesSolid Angle - Wikipedia, The Free Encyclopediayerlis21No ratings yet
- 9.1 Cartesian Coordinates in Space: Handed If It Can Be Rotated So The Three Axes Are in This Position. FigureDocument4 pages9.1 Cartesian Coordinates in Space: Handed If It Can Be Rotated So The Three Axes Are in This Position. FigureVivek PanduNo ratings yet
- Polar Coordinates Packet 1Document20 pagesPolar Coordinates Packet 1rootveshmehtaNo ratings yet
- The Earth Geometry: Position and Velocity Initialization For Navigation in ECI/ECEFDocument17 pagesThe Earth Geometry: Position and Velocity Initialization For Navigation in ECI/ECEFhemakhannaNo ratings yet
- Angle: Units of Measure For AnglesDocument6 pagesAngle: Units of Measure For AnglesashokNo ratings yet
- Electromagnetic Field TheoryDocument73 pagesElectromagnetic Field Theoryajas777BNo ratings yet
- Solid AngleDocument9 pagesSolid AngleDimitrios Christos SarvanisNo ratings yet
- Kedwal Antenna NotesDocument24 pagesKedwal Antenna NotesNeerajBooraNo ratings yet
- Spherical Coordinate SystemDocument9 pagesSpherical Coordinate SystemJavier Garcia RajoyNo ratings yet
- Two-dimensional space explainedDocument26 pagesTwo-dimensional space explainedNaniNo ratings yet
- Stereographic Projection MapDocument14 pagesStereographic Projection MapAdrian Salcedo ChiticaNo ratings yet
- GE 103 Lecture 3Document80 pagesGE 103 Lecture 3aljonNo ratings yet
- Cartograph Y: Map Projections and Coordinate SystemDocument80 pagesCartograph Y: Map Projections and Coordinate SystemArt CaubaNo ratings yet
- Module 3.2 - Spherical Coordinate SystemDocument40 pagesModule 3.2 - Spherical Coordinate Systemerika marasiganNo ratings yet
- Co - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroDocument28 pagesCo - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroAwesh KumarNo ratings yet
- Co - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroDocument28 pagesCo - Ordinate Systems: Engr. Mansoor A. Soomro Assistant Professor, Department of Electrical Engineering, MUET, JamshoroAwesh KumarNo ratings yet
- Ec2253 NolDocument109 pagesEc2253 Nolramsai4812No ratings yet
- Stereographic ProjectionDocument14 pagesStereographic Projectionaskara25No ratings yet
- Lating Paraboloid As A Useful Interpretation of The Second Fundamental FormDocument14 pagesLating Paraboloid As A Useful Interpretation of The Second Fundamental FormhsvfisicaNo ratings yet
- Chapter1 Analytic GeometryDocument15 pagesChapter1 Analytic GeometryOssama KheadryNo ratings yet
- Spherical Coordinates: Figure 1. A Point P Defined in The Cartesian Coordinate SystemDocument3 pagesSpherical Coordinates: Figure 1. A Point P Defined in The Cartesian Coordinate SystemsuchigautamNo ratings yet
- Department of ElectronicsDocument8 pagesDepartment of ElectronicsAsgher KhattakNo ratings yet
- Analytic Geometry - WikipediaDocument17 pagesAnalytic Geometry - Wikipedianizam uddinNo ratings yet
- 01-jgsp-13-2009-75-88-THE LOXODROME ON AN ELLIPSOID OF REVOLUTIONDocument14 pages01-jgsp-13-2009-75-88-THE LOXODROME ON AN ELLIPSOID OF REVOLUTIONdfmolinaNo ratings yet
- HttpsDocument38 pagesHttpssmileforeverNo ratings yet
- Curl (Mathematics) - WikipediaDocument14 pagesCurl (Mathematics) - WikipediaAns RazaNo ratings yet
- Geometry and shapes in Euclidean spaceDocument2 pagesGeometry and shapes in Euclidean spaceJohn Matthew . SUYATNo ratings yet
- An Introduction to TwistorsDocument15 pagesAn Introduction to TwistorsStanislas Petit100% (2)
- SphereDocument15 pagesSpherejolinmartinNo ratings yet
- UNIT - I - Electromagnetic Theory - SEEA1202: School of Electrical and Electronics EngineeringDocument111 pagesUNIT - I - Electromagnetic Theory - SEEA1202: School of Electrical and Electronics EngineeringvosecNo ratings yet
- Profundizacion MatematicasDocument10 pagesProfundizacion MatematicasNico Carreño LopezNo ratings yet
- Solid angles in perspective: Ω, have a small but essential role in physics. For example, howDocument8 pagesSolid angles in perspective: Ω, have a small but essential role in physics. For example, howashkarkabeer08No ratings yet
- Assignment AdvanceDocument27 pagesAssignment AdvanceUng Hui WengNo ratings yet
- Wolfgang Hasse and Volker Perlick - Gravitational Lensing in Spherically Symmetric Static Spacetimes With Centrifugal Force ReversalDocument18 pagesWolfgang Hasse and Volker Perlick - Gravitational Lensing in Spherically Symmetric Static Spacetimes With Centrifugal Force ReversalKunma050No ratings yet
- Geometry Radius Definition CircumferenceDocument16 pagesGeometry Radius Definition CircumferenceNaniNo ratings yet
- Polar Equations of Conics: Alternative Definition of ConicDocument7 pagesPolar Equations of Conics: Alternative Definition of ConicBeto LangNo ratings yet
- Sphere: Not On The Sphere (An Open Ball) - The Distinction Between Ball and Sphere Has Not Always Been MaintainedDocument16 pagesSphere: Not On The Sphere (An Open Ball) - The Distinction Between Ball and Sphere Has Not Always Been MaintainedAndreGuilhermeNo ratings yet
- Chapter 1 PPT 3rd Year SurevyDocument24 pagesChapter 1 PPT 3rd Year SurevyHenok AsmamawNo ratings yet
- Kurt Girstmair Napier400Memorial Napier - Spherical KLK 20160730Document16 pagesKurt Girstmair Napier400Memorial Napier - Spherical KLK 20160730shyan berwaryNo ratings yet
- Cartesian Coordinate SystemDocument11 pagesCartesian Coordinate SystemAmar GillNo ratings yet
- Running Head: A Conpetual Analysis of Trig Func 1Document25 pagesRunning Head: A Conpetual Analysis of Trig Func 1Dejvi ManjaniNo ratings yet
- A Cartesian Coordinate System Specifies Each Point Uniquely in A Plane by A Pair of Numerical CoordinatesDocument12 pagesA Cartesian Coordinate System Specifies Each Point Uniquely in A Plane by A Pair of Numerical CoordinatesGopinath MurutiNo ratings yet
- Sphere - WikipediaDocument72 pagesSphere - WikipediaNaniNo ratings yet
- Stereographic Projection: Complex AnalysisDocument4 pagesStereographic Projection: Complex AnalysisEhsan UmerNo ratings yet
- EMF Notes of Lesson 1Document110 pagesEMF Notes of Lesson 1prasad888No ratings yet
- Geometry On The Sphere PDFDocument13 pagesGeometry On The Sphere PDFGopi GaNo ratings yet
- Cartesian Coordinate PlaneDocument10 pagesCartesian Coordinate PlaneAira Mae Regua VenturanzaNo ratings yet
- Materi Kuliah Ke - 6Document46 pagesMateri Kuliah Ke - 6Jahfal JunarlinNo ratings yet
- Service Positioning and DesignDocument3 pagesService Positioning and DesignSaurabh SinhaNo ratings yet
- Act 1&2 and SAQ No - LawDocument4 pagesAct 1&2 and SAQ No - LawBududut BurnikNo ratings yet
- L Williams ResumeDocument2 pagesL Williams Resumeapi-555629186No ratings yet
- Project Report Software and Web Development Company: WWW - Dparksolutions.inDocument12 pagesProject Report Software and Web Development Company: WWW - Dparksolutions.inRavi Kiran Rajbhure100% (1)
- 5 Guys Nutrition InfoDocument1 page5 Guys Nutrition InfoJody Ike LinerNo ratings yet
- Plastic Welding: We Know HowDocument125 pagesPlastic Welding: We Know Howprabal rayNo ratings yet
- Oracle Unified Method (OUM) White Paper - Oracle's Full Lifecycle Method For Deploying Oracle-Based Business Solutions - GeneralDocument17 pagesOracle Unified Method (OUM) White Paper - Oracle's Full Lifecycle Method For Deploying Oracle-Based Business Solutions - GeneralAndreea Mirosnicencu100% (1)
- Analysis and Design of Multi Storey Building by Using STAAD ProDocument5 pagesAnalysis and Design of Multi Storey Building by Using STAAD Prolikith rockNo ratings yet
- Clarinet Lecture Recital - Jude StefanikDocument35 pagesClarinet Lecture Recital - Jude Stefanikapi-584164068No ratings yet
- SS1c MIDTERMS LearningModuleDocument82 pagesSS1c MIDTERMS LearningModuleBryce VentenillaNo ratings yet
- 3 - Content - Introduction To Java, JVM, JDK PDFDocument8 pages3 - Content - Introduction To Java, JVM, JDK PDFAnonymous zdY202lgZYNo ratings yet
- Presentation of Urban RegenerationsDocument23 pagesPresentation of Urban RegenerationsRafiuddin RoslanNo ratings yet
- Best Way To LearnDocument3 pagesBest Way To LearnRAMIZKHAN124No ratings yet
- Oracle® E-Business Suite: Integrated SOA Gateway Implementation Guide Release 12.2Document202 pagesOracle® E-Business Suite: Integrated SOA Gateway Implementation Guide Release 12.2yadavdevenderNo ratings yet
- 1571-1635319494618-Unit 04 Leadership and ManagementDocument48 pages1571-1635319494618-Unit 04 Leadership and ManagementdevindiNo ratings yet
- United Airlines Case Study: Using Marketing to Address External ChallengesDocument4 pagesUnited Airlines Case Study: Using Marketing to Address External ChallengesSakshiGuptaNo ratings yet
- 1 PBDocument11 pages1 PBAnggita Wulan RezkyanaNo ratings yet
- IPO Fact Sheet - Accordia Golf Trust 140723Document4 pagesIPO Fact Sheet - Accordia Golf Trust 140723Invest StockNo ratings yet
- Reference - Unit-V PDFDocument128 pagesReference - Unit-V PDFRamesh BalakrishnanNo ratings yet
- Icelandic Spells and SigilsDocument16 pagesIcelandic Spells and SigilsSimonida Mona Vulić83% (6)
- Manual Handling Risk Assessment ProcedureDocument6 pagesManual Handling Risk Assessment ProcedureSarfraz RandhawaNo ratings yet
- Stages of Intimate RelationshipsDocument4 pagesStages of Intimate RelationshipsKrystalline ParkNo ratings yet
- Integrating Therapeutic Play Into Nursing and Allied Health PracticeDocument214 pagesIntegrating Therapeutic Play Into Nursing and Allied Health PracticeIbrahim SabraNo ratings yet
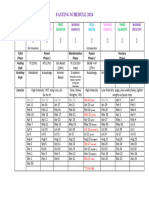
- Moon Fast Schedule 2024Document1 pageMoon Fast Schedule 2024mimiemendoza18No ratings yet
- Hisar CFC - Approved DPRDocument126 pagesHisar CFC - Approved DPRSATYAM KUMARNo ratings yet
- MECHANICAL PROPERTIES OF SOLIDSDocument39 pagesMECHANICAL PROPERTIES OF SOLIDSAbdul Musavir100% (1)
- Mad LabDocument66 pagesMad LabBalamurugan MNo ratings yet
- KingmakerDocument5 pagesKingmakerIan P RiuttaNo ratings yet
- Solutions: Spheres, Cones and CylindersDocument13 pagesSolutions: Spheres, Cones and CylindersKeri-ann MillarNo ratings yet
- FM 5130Document66 pagesFM 5130Aswini Kr KarmakarNo ratings yet
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.From EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Rating: 5 out of 5 stars5/5 (1)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 5 out of 5 stars5/5 (5)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldFrom EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldRating: 3 out of 5 stars3/5 (79)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 4.5 out of 5 stars4.5/5 (3)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Mental Math Secrets - How To Be a Human CalculatorFrom EverandMental Math Secrets - How To Be a Human CalculatorRating: 5 out of 5 stars5/5 (3)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Limitless Mind: Learn, Lead, and Live Without BarriersFrom EverandLimitless Mind: Learn, Lead, and Live Without BarriersRating: 4 out of 5 stars4/5 (6)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormFrom EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormRating: 4.5 out of 5 stars4.5/5 (20)
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceFrom EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceNo ratings yet
- Calculus Workbook For Dummies with Online PracticeFrom EverandCalculus Workbook For Dummies with Online PracticeRating: 3.5 out of 5 stars3.5/5 (8)