Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Train Accidents Prevention System with
FPGA Control System
Nagarathna H S Asst. professor,
Kushal C K, Chandan A C, N M Siddharth, Sriram Vishnu Prasad.
Dr Ambedkar Institute Of Technology, Bengaluru-560056, India
Abstract:- Train accidents have serious consequences review the existing literature, industry practices and
such as loss of life, damage to property, and disruption of technological developments regarding TCAS.
transportation. To reduce these risks and improve rail
safety, the development of high-speed trains is becoming This study will focus on evaluating TCAS performance
a priority. This summary provides an overview of state- and capabilities in a variety of operational situations,
of-the-art train crash avoidance systems designed to including high speed train, intersections and intersections.
prevent train crashes and improve rail safety.
It will explore the integration of TCAS with existing
These measures were taken in many ways, causing signals and trains, as well as the integrationof new technologies
numbers to drop further and in serious situations. This such as advanced sensors, data analysis and communication
article presents technologies that can be used in processes.
preventive measures to reduce train suicides, crime and
level crossing customer accidents. In addition, this study will examine the humanfactors of
TCAS use, including operator training, decision making, and
It describes their ability to reduce accidents, their usability of the TCAS interface. Understanding the
cost effectiveness, and their integration into all train interaction between train operators and TCAS will also help
transport. improve the quality of education.
Keywords:- Train Collision Avoidance System, Train II. TRAIN ACCIDENTS PREVENTION SYSTEM
Collision Avoidance, Train Collision, Automatic Train
Protection (ATP), Automatic Train Control (ATC), Positive Enhanced HMI for seamless integration and optimized
Train Control (PTC), Traffic Communication Based Traffic use of TCAS systems.
Management (CBTC), Train -to - Train communication, train In addition, this study will solve problems and decisions
detection, train location, train anti-collision signal system, during the use of TCAS such as cost,coordination, control
train speed control, train separation, train approach and system reliability. It will review current standards and
detection, train accident assessment, train emergency regulations governing TCAS deployment, emphasizing the
braking, train control system, train security system, railway importance of international cooperation and harmonization to
safety, Railway signal. ensure consistent safety standards across different train races.
I. INTRODUCTION With a comprehensive TCAS analysis, this newsletter
Rail transport plays an important role in international aims to provide insight and recommendations for the
mobility and economic development. However, ensuring development, optimization and future development of
railway safety remains a major challenge due to the collision avoidance systems. The findings of this research
complexity of railways and therisks associated with traffic will helpimprove rail safety, reduce the risk of trainaccidents,
accidents. The Train Accidents Prevention System has and improve the overall efficiency and reliability of
become an important technology for reducing the risk of operations on the train.
collisions and improving railway safety. III. RELATED WORK
TCAS refers to the maximum safety system designed to Train Collision Avoidance Systems (TCAS) are safety
prevent train collisions. These systems use technology, critical systems designed to prevent train collisions. In recent
sensors, and communication and control systems to detect years, there has been an interest in the development of TCAS
collision risks and take appropriate action to prevent technology to improve safety in the railway industry. Below
accidents. is a brief history of train accidents:
By constantly monitoring the train's position, position Li Si-huia, b, Cai Baigena, b, , Liu Jianga, b, accident risk
and speed, TCAS can issue timely alerts, coordinate train analysis based on early train crashes by Wang Jian - With
movements, and implement security measures to ensure the development of transportation in China, many
departure. passenger and high-speed trains were built and put into use.
Currently, China Train Control System (CTCS) Level 3 has
The purpose of this journal is to conduct research on been approved in the management and delivery of
train crashes and their effects on rail safety. Thisstudy aims to passengers and high-speed trains, and has become a
determine the effectiveness, problems and future common unified technology for safety and reliability
expectations of TCAS in preventing train accidents. It will decisions.
IJISRT23JUN1025 www.ijisrt.com 3714
Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Designing a train collision detection system using a IV. METHODS
wireless sensor network", M.Anas Imtiaz and M. Yasin
Raja. This article presents a TCAS that uses a wireless Data Collection and Analysis: Collect and analyze data on
sensor network to detect and avoid collisions between train operations, track configuration, machinery
trains. The system plans to use acceleration and position configuration, and accident history. This information can
sensors to control the train's position and speed and warn provide insight into patterns, risk factors and potential areas
the driver in case of a possible collision. for accident development.
"Avoiding a train crash using computer vision and deep Sensor Technologies: explores and evaluates different
learning", by A.B. Kulkarni and M. P. Sharma. This article sensor devices that can be used to identify trains and
presents a TCAS that uses computer vision and deep monitor their location and movement. This may include
learning techniques to detect and avoid train collisions. technologies such as radar, lidar, infrared sensors, or
The proposed system uses cameras mounted on trains to roadside sensors such as axle counters or track circuits.
capture real-time images of the tracks and uses deep Communication Engineering: Research and development
learning algorithms to analyze images to detect collisions. of communication systems and systems that enable real-
B.K Pradhan and S.K. Dash. This article introduces TCAS time data exchange between trains, facility control and
to detect and avoid train collisions using artificial household appliances. This will include measuring the
intelligence. The proposed system uses machine learning reliability, latency and scalability of various
algorithms to analyze train speed and location data and alert communication methods such as radio, Wi-Fi or mobile.
drivers if a collision is detected. Algorithm Development: Design and implement intelligent
"Avoiding a train accident using RFID technology", S. V. algorithms that process sensor data and make decisions to
Shinde and SR Sawant. This document introduces TCAS prevent train accidents. These algorithms can include
to detect and avoid train collisions using RFID technology. collision risk assessment, crash prediction, and collision
The system plans to use RFID tags placed on trains and avoidance based on predefined rules or machine learning
tracks to determine the train's position and speed and alert techniques.
drivers when an accident is detected. Simulation and Modeling: Use computer simulations or
"Train Collision Avoidance System (TCAS) Based on mathematical models to design and analyze train
Wireless Sensor Networks" by D. D. Datta and M. N. movements and accidents. This allows the different TCAS
Mohanty. codes, configuration settings and functions to be reviewed
This article presents a TCAS that uses a wireless sensor without actual use.
network to detect and avoid train collisions. The proposed Field testing and verification: Conduct field tests or field
system uses accelerometers to measure the train speed and trials to evaluate the effectiveness and feasibility of train
warning the driver when a collision is detected. collisions in real-world operations. This will include the
"RF Based Train Collision Avoidance System"- Human development and testing of a standard TCAS solution on
errors has become the number one reason of train crashes. selected train lines or test tracks.
The purpose of this article is to eliminate train collsions Human Factors Assessment: Consider the human factors
using analysis. Each locomotive is equipped with an involved in the process of working with and dealing with
automatic control system. Railway lines are divided into train crashes. This may include evaluating the usability of
sections and different numbers are given, which are read by the user interface, assessing the impact of the machinist's
following the locomotives. This tracking number will be work, and conducting user surveys or research to gather
shared with neighboring trains using radio communication feedback and improve the design.
for tracking. Compliance: Review and comply with the regulatory
The system then compares its operator with neighbouring procedures and standards that govern the use and operation
trains. After finding the same part number, the monitoring of 0+.
system will stop the train and warn the driver to avoid Train Collision Avoidance Systems.
collision.. This article presents a special method for Ensure TCAS solutions meet required security standards
piecewise train movement numbers. The communication and are connected to business processes.
protocol is also prepared to enable the system RF Cost-Benefit Analysis: Perform a cost-benefit analysis to
transceivers to transmit data in half duplex mode. evaluate the economy and benefits of using a train crash
"Avoiding Train Collisions Using GPS and GSM prevention system. This will include analyzing delivery,
Modules", Aamir Ahamed Md. Sayed Hossen and maintenance and operational costs and comparing them to
Naeemul Islam - This article presents a methodology to reductions in damage, injury and operational disruption.
analyze the problems of railways. The system combines a
PIC16F877A microcontroller, an ultrasonic sensor, and V. TRAIN COLLISION PREVENTION SYSTEM
GPS and GSM. An ultrasonic sensor interfaced with a
Continuous Improvement: Use feedback and techniques
microcontroller is used to detect the problem. GPS is used
to continuously improve train wrecks to prevent accidents.
to locate the train by identifying obstacles behind the train
This includes monitoring system performance, reviewing
stop.
incident reports, and drawing lessons learned toimprove the
The job is sent to the control room using GSM. The system effectiveness and reliability of theTCAS system.
works fine except in bad weather conditions. Since it is an
ultrasonic sensor project, this project will not work well
when the air pressure is too high.
IJISRT23JUN1025 www.ijisrt.com 3715
Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
VI. WORKING communications, such as the location and speed of various
trains in their area.
The road subsystem consists of RFID tags mounted on
the road at stations and on roads, providing information about TCAS stand-alone units are provided in the centre of
the road to on- board Loco TCAS units. Parts of the road, the cross section and in the intermediate blocking signal (IBS)
including vehicles, lights and barriers, are assigned position if they are not within range of the radio stations.
identification numbers called Track Identification Numbers Interconnect Units (RIUs) are used where a signal can be
(TINs). TINs are used with RFID tags to determine the routed to a nearby TCAS location, such as LC ports / IBs /
direction of a train. distribution interface on the radio at the end or the server
station car tower.
The system also includes fixed TCAS units andradios
installed at the station for communication with locomotives The TCAS train is installed on the train todetermine
in the stationarea. Fixed TCAS is associated with the station the location of the train by reading the data from the RFID tag
connection and receives dynamic information about various with the help of an RFID reader. The Loco TCAS unit
navigation information in real time. sets the location uncertainty (the approximate distance of the
train from the location) and the TIN to undefined (zero)
Routing information for all signals monitored by a fixed before making a decision. When a train/train passes two
TCAS station is set according to the TCAS control table RFID tags in sequential operations, the train's direction of
(except for shunt signals and overlapping signals). Fixed travel must be determined.
TCAS units receive real-time information via UHF radio
Fig 1. Block Diagram of TCAS
The Loco TCAS unit sets the location uncertainty(the Fixed TCAS units must use the train/train travel
approximate distance of the train from the location) and the direction to detect train/train signals. Fixed TCAS unit,
TIN to undefined (zero) before making a decision. When a moving in the direction of the signal or/and following the state
train/train passes two RFID tags in sequential operations, the in the circuit or/and entering theoff state, point
train's direction of travel must be determined. The Loco
TCAS unit dynamically calculates the position of the train VII. TRAIN COLLISION AVOIDANCE SYSTEM
between two RFID tags based on thedistance traveled by the
last RFID tag from the speedometer provided on the Position and condition of the docking circuit circuit.
locomotive. After theRFID card has passed, the Loco TCAS Then the fixed TCAS unit must transfer theauthority to act at
unit sends the train's position and direction to the TCAS unit the decision area station to the TCAS area. The length of the
via a UHF radio antenna. actual travel dependson the signal direction of the line of sight
of the stop signal. The locomotive unit should
accelerate/decelerate in various situations based onmovement
IJISRT23JUN1025 www.ijisrt.com 3716
Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
rules, speed limits, and other information from the Trackside The communication technology used for data transfer
subsystem. TCAS trains must display train speed, allowable between stations is multi-channel full duplex UHF radio
speed, target distance and target speed to the Train Interface communication using TDMA/FDMA. For communication
(DMI). between the TCAS station and the Loco it controls, the station
is assigned a unique frequency pair. A Loco TCASunit can
If the road signal is red (danger), the fixed TCAS unit also communicate with other Loco TCAS units in
should send this information to the local TCASand reset the community, parking and emergency situations (SoS, frontal
mobile license to zero.. If the locomotive driver does not stop collision, traffic collision) and use the program (f0) in its
the train, the brakeis applied, preventing the signal crossing program.
hazard (SPAD). If there is a conflict between signals,
direction points, segments of the race, signal combinations A Network Monitoring System (NMS) with a central
and TINs, the fixed TCAS unit should send the most limited office in the OFC network will be provided for central
number of signals andreduce the right to act for this reason. monitoring of TCAS-equipped trains and stations in the
This will prevent trains from colliding at the station.. In the network. Transmission of fault/critical messages from TCAS
case of sections, if the fixed TCAS detects that twotrains are station and local TCAS to NMS is done via existing GSM
moving towards each other on the same TIN, the fixed TCAS interface.
will generate SoS commandsfor both trains.
Trouble shooting, offline simulation, real-time
When the Loco specific SoS is received from the TCAS monitoring of TCAS locomotives, etc., developed by NMS.
station station, the train will be stopped by applying the brake. In the TCAS system, radio communication between Loco
The regulations also provide for the forwarding of SoS TCAS and TCAS fixed units must use encryption.
messages from the localTCAS to the other local TCAS in an
emergency. For fixed TCAS and secure communication, Loco
TCAS receives authentication keys using GSM/GPRS
communication over Key Management System (KMS). The
Real Time Clock(RTC) of each TCAS is synchronized with
GPS/GNSS.
VIII. COMPONENTS
Fig. 2: Key components
IX. TRAIN COLLISION PREVENTION SYSTEM RFID tag
TCAS unit
General train accident includes the followingitems: Tower and Antenna Air Subsystems Air subsystems must
A. Monitoring equipment includes fixed TCAS and have
B. Onboard equipment C. Loco TCAS Vital Computer (ii).RFID reader
The Trackside Subsystem D. Loco TCAS radio unit
Consists of the Trackside Subsystem
IJISRT23JUN1025 www.ijisrt.com 3717
Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
E. Driver Machine Interface (DMI) (v). Brake Interface Unit interaction tool to get important information about the
(BIU) installation, such as various signals, in a timelymanner.
RFID Tag It contains information about the location and content
The RFID tag provides station static information tothe of RFID tags and static signals such as speed limits.UHF
locomotive. In addition to working as a reference, they radio communication receives real-time information such as
broadcast radio channels and transmit signals to the the location and speed of various trains in the area. Based on
locomotive unit, etc. They provide instant information such this information, he saw an emergency and could orderLoco
as RFID tags should be placed on the road in the parking lot, to stop the process.
point area, next to the signal, and on the road section to
provide tracking information to the localTCAS. As per Indian Tower and antenna Antenna
Railways guidelines RFID tags must be placed on the sleepers The antenna of the Station / IBS / Locked Door Unit must
in the tabs. be a combination of vertically polarized omnidirectional
and/or fixed communication antenna. Antenna cables and
Stationary TCAS Unit antennas must be suitable to provide a minimum
Fixed TCAS Units fixed TCAS units will be communication distance of approximately 1 .The initial
implemented on all Indian Railways providing signal colors. signal of afixed TCAS unit is close to 5 km (usually 4.5 km
By default it should work to interact with panel locks and in case of Indian Railways two zones).
electric/solid state locks.
On-Board Subsystem (Locomotive TCAS Unit)
Stations should always have fixed TCAS units to cover The locomotive's TCAS host is a system that monitors
all traffic signals. Areas with insufficientTCAS radio signal the train's movement based on data exchange with fixed
tower should be provided in themiddle of the field (IBS) and TCAS units and other TCAS trains. A minimum of 2 out of 2
in the center of the intersection. This should be related to the is required for theComputer Architecture section.
Fig. 3: Loco TCAS unit
Loco TCAS host B. Loco TCAS host
Loco TCAS radio unit (if using UHF) Regional TCAS
X. TRAIN COLLISION PREVENTION SYSTEM radio must be the same as TCAS radio. In order for the Loco
TCAS radio to communicate with the TCAS unit, it must have
Loco Pilot will have mechanisms and Loco TCAS twoUHF full-duplex radio modems with separate cables and
master must be synchronized in time with the GNSS clock antennas in hot standby mode. Locomotive antennas must be
and synchronized with other TCAS systems in hot standby omnidirectional, have vertical polarization and gain better
mode.Loco TCAS host must have the following functions: than 3 dB.
A. Train interface and brake. C. RFID Readers
Bidirectional inductive speed sensor interface for Each Loco TCAS unit must be equipped with two RFID
measuring distance and speed. readers to receive information from RFID tags attached to the
Interface with RFID reader for reading RFID tags side of emergency equipment.
installed on the road.
Interacts with the BTM reader to read the rail-mounted D. Loco Pilot Machine Interface (DMI)
transponders of the TPWS section. Much of the information presented is presented in the
Interfaces with Driver Interface (DMI) with display and form of a circuit (spring) simulation and is based on
activation button/switch. ergonomics management and driver comfort.
Two GSM interfaces to connect the main network
monitoring system Release additional debt. Reminders and reminders are
(NMS) and the main system (KMS). It will also work with also effective. The operating and instrumentation panel (LP-
OCIP/DMI) of the buttons/switches to display/operate the
LTE-capable LTE.
following functions:
USB interface for downloading logs and other files for
diagnostic purpose
IJISRT23JUN1025 www.ijisrt.com 3718
Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Communication with Loco TCAS. XII. CONCLUSION
Locomotive drive selects train type.
SOS action for drivers. The number of events that occurred in the previous year.
Signal representation. We have implemented new products with RFID to prevent
train accidents. This product has been tested and works well.
train length screen
The main purpose of this study is to prevent the train from
train mode screen stopping if the mechanic does not use the brakes, and the
screen of all locomotive operating modes brake brake unit (BIU) will also be used.
current speed
overspeed REFERENCES
allowable speed
target speed (Enter Circular Line for ) [1.] "A Review of Train Collision Avoidance Systems," by
Action Authority (MA) (xiii) Muhammad Ali and Benjamin Blunt, International
Journal of Emerging Technology and Advanced
Contextual Message display function on DMI toget Engineering, Vol. 7, No. 9, September 2017.
Loco Pilot's attention. [2.] "Train Collision Avoidance System Using Arduino
and Ultrasonic Sensors," by Mohamed A. El-Shafie,
E. Brake Interface Unit (BIU) American Journal of Engineering Research, Vol. 8,
The BIU should use the locomotive's normal braking, No. 10, October 2019.
service braking and emergency braking, respectively, [3.] "Collision Avoidance System for High-Speed Trains
depending on the type of braking command it receives from Based on Multi-Agent Approach," by Seung-Hwan
the locomotive TCAS unit. In addition to these brakes, if Kim and Tae-Hwan Kim, Proceedings of the 2018
Loco TCAS generates a Loco Brake command, it must use International Conference on Information and
LocoBrakes. Communication Technology Convergence, IEEE,
2018.
BIU consists of two modules: Electronic Module: [4.] "Safety System for Trains Based on Collision
It has a control card with built-in air brake control Avoidance," by Pattama Teetes and Worapot
logic. The board interfaces with the analog input module, Ngamsriworakul, Proceedings of the 2014 IEEE
digital input module and digital output module to monitor and Conference on Intelligent Transportation Systems,
control the stop/release application. IEEE, 2014.
[5.] "Design and Implementation of a Train Collision
Pneumatic Panel: Avoidance System," by Md. Babul Hossain, Syed
Contains various valves, pressure switch and manual
Farzanur Rahman and Tasrif Islam, Journal of
valves and electronic equipment forbrake control related to
Electrical and Electronics Engineering, Vol. 8, No.1,
the IRAB system. BIU the location of the TCAS confirms the
June 2020.
needfor collision.
[6.] Kurhe Jyoti, Gophane Prajakta, Kadam Madhuri and
XI. ADVANTAGES Panchal Anubha, "Train Collision Detection and
Avoidance", International Journal of Engineering
Train Collision Prevention System Science and Computing, March 2016.
Road safety: The main benefit of collision avoidance is to [7.] Bojarski, M., et al. (2016). End to End Learning for
ensure the safety of passengers and crew. The system Self-Driving Cars. arXiv preprint arXiv:1604.07316.
provides early warning to prevent accidents by identifying Link
potential collisions or derailments.2. Avoid human error: [8.] Choudhary, A., & Wu, W. (2020). A Review onDeep
Train accidents are often caused by human error, be it the Learning Techniques for Autonomous Vehicle
driver, conductor or other train personnel. Control. IEEE Access, 8, 39782-39806.
Accident prevention can help reduce human error by [9.] Althoff, M., & Benenson, R. (2017). Obstacle
providing automated alerts and alerts. avoidance for self-driving cars in urban environments.
Improved efficiency: The system helps improve train times In IEEE International Conference on Robotics and
and schedules by allowing trains to run faster and stick to Automation (ICRA) (pp. 3479-3486). IEEE.
tighter schedules. This will help reduce lags and improve [10.] Codevilla, F., et al. (2019). Exploring thelimitations of
overall performance. behavior cloning for autonomous driving. In
Low costs: Train crashes can be costly, both in terms of Proceedings of the IEEE International Conference on
damage to the train and infrastructure and potential legal Robotics and Automation (ICRA) (pp. 8555-8562).
issues. Avoidance techniques can help reduce these costs IEEE.
by preventing accidents before they happen. [11.] Xu, J., et al. (2019). Reinforcement learning based
autonomous driving: A survey. IEEE Transactions on
Improved maintenance: Supervisors can use accident
Intelligent Transportation Systems, 21(8), 3223-3244.
prevention data to identify and correct errors and processes
[12.] Liang, X., et al. (2020). Autonomous driving in
that could cause problems.
congested urban scenes: Real-time motion planning
Reduce environmental impact: Train crashes cause serious
with a learned collision avoidance policy. In IEEE
damage to the environment, causing oil spills and other
Conference on Computer Vision and Pattern
pollution. Collision avoidance by preventing such incidents
Recognition (CVPR) (pp. 12701-12710). IEEE.
can help reduce the environmental impact of transportation.
IJISRT23JUN1025 www.ijisrt.com 3719
Volume 8, Issue 6, June 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
[13.] Hecker, S., et al. (2018). End-to-end training ofdeep
visuomotor policies. The Journal of MachineLearning
Research, 18(1), 1334-1373.
[14.] Lee, D., Yoo, S., & Han, S. (2020). Vehicle collision
avoidance algorithm using machine learning-based
driving policy with real-time optimization. IEEE
Transactions on Industrial Informatics, 16(12), 7473-
7484. Link.
[15.] Ziqun Zhang, Junfeng Wang, Longlong Guo, Wenjing
Yang, Fan Wang, Peng Xu, "Research on Minimum
Non-Collision Distance and Protection Strategy for
Normal Train to Avoid Rear-End Accidents With
Braking-Fault Train", IEEE Transactions on
Intelligent Transportation Systems, vol.24, no.4,
pp.4306-4319, 2023.
[16.] Aamir Ahamed, Naeemul Islam, Md. Atikul Shahadat
Soikot, Md. Sayed Hossen, Rubel Ahmed,
Mohammad Anisul Hasan, "Train Collision
Avoidance Using GPS and GSM Module", 2019
International Conference on Power Electronics,
Control and Automation (ICPECA), pp.1-4, 2019.
[17.] Biswajeeban Mishra, "TMCAS: An MQTT based
Collision Avoidance System for Railway networks",
2018 18th International Conference on Computational
Science and Applications (ICCSA),pp.1-6, 2018.
IJISRT23JUN1025 www.ijisrt.com 3720
You might also like
- Automated Road Traffic Congestion Detection and Alarm Systems: Incorporating V2I Communications Into AtcssDocument31 pagesAutomated Road Traffic Congestion Detection and Alarm Systems: Incorporating V2I Communications Into AtcssMuhammad HassnainNo ratings yet
- IJCESRDocument8 pagesIJCESRAastiNo ratings yet
- A Review Paper On The Evaluating Cost-Effective Railway Level Crossing Protection SystemDocument3 pagesA Review Paper On The Evaluating Cost-Effective Railway Level Crossing Protection SystemtmmNo ratings yet
- ITS Application in RailwayDocument25 pagesITS Application in RailwayNIDHI JARIWALANo ratings yet
- Obstacle Detection System For Railways: Karthick S, Aishwarya Patil, Ullas S U K. SaravanakumarDocument3 pagesObstacle Detection System For Railways: Karthick S, Aishwarya Patil, Ullas S U K. Saravanakumarkarthick sNo ratings yet
- Kavach: Cab Signalling & Automatic Train Protection System for Digital RailwaysFrom EverandKavach: Cab Signalling & Automatic Train Protection System for Digital RailwaysNo ratings yet
- Automatic Railway SystemDocument5 pagesAutomatic Railway SystemTomu RomsonNo ratings yet
- A New Analytical Approach To Evaluate The Critical-Event Probability Due To WirelessDocument13 pagesA New Analytical Approach To Evaluate The Critical-Event Probability Due To Wirelessgetachew-hagos.geletaNo ratings yet
- A Key Step To Virtual CouplingDocument6 pagesA Key Step To Virtual Couplinggetachew-hagos.geletaNo ratings yet
- Transportation Research B: Nader Azad, Elkafi Hassini, Manish VermaDocument19 pagesTransportation Research B: Nader Azad, Elkafi Hassini, Manish Vermawaelrash1No ratings yet
- Railway Track Security System Report PDFDocument26 pagesRailway Track Security System Report PDFeshu50% (2)
- Railway Track Structural Heath Monitoring SystemDocument46 pagesRailway Track Structural Heath Monitoring Systempunith100% (1)
- Safety Impacts of Queue Warning in A Connected Vehicle EnvironmentDocument7 pagesSafety Impacts of Queue Warning in A Connected Vehicle Environmentniluh shintaNo ratings yet
- Advanced Train Management SystemDocument4 pagesAdvanced Train Management SystempoketupiNo ratings yet
- Studies On The Performance Characteristics of A Typical Collision-Free Transportation SystemDocument7 pagesStudies On The Performance Characteristics of A Typical Collision-Free Transportation SystemInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 1 s2.0 S0743731522000636 MainDocument14 pages1 s2.0 S0743731522000636 MainVinniNo ratings yet
- Train EstablishedDocument23 pagesTrain EstablishedErmias Assaminew AlmazNo ratings yet
- Papers PresentationDocument4 pagesPapers Presentationamit6200506882No ratings yet
- Railway Track Security System ReportDocument26 pagesRailway Track Security System ReportAshishNegi100% (28)
- Kalman Filter Applications For Traffic Management: Constantinos Antoniou Moshe Ben-AkivaDocument29 pagesKalman Filter Applications For Traffic Management: Constantinos Antoniou Moshe Ben-AkivaVIDYANo ratings yet
- Aplications+v1 1Document9 pagesAplications+v1 1Mxplatform Mx PlatformNo ratings yet
- Situation-Aware QoS Routing Algorithm For Vehicular Ad Hoc NetworksDocument16 pagesSituation-Aware QoS Routing Algorithm For Vehicular Ad Hoc Networksaidden03No ratings yet
- Sensors: A Novel Approach To Railway Track Faults Detection Using Acoustic AnalysisDocument19 pagesSensors: A Novel Approach To Railway Track Faults Detection Using Acoustic AnalysisChristian BNo ratings yet
- 331 Ning B Ed Advanced Train Control SystemsDocument167 pages331 Ning B Ed Advanced Train Control SystemsNitesh JadhavNo ratings yet
- A Critical Analysis of Signal Passed at Danger SPADocument7 pagesA Critical Analysis of Signal Passed at Danger SPARatul PalodhiNo ratings yet
- Vulnerabilities, Attacks, and Countermeasures in Balise-Based Train Control SystemsDocument10 pagesVulnerabilities, Attacks, and Countermeasures in Balise-Based Train Control SystemsArash AziminejadNo ratings yet
- CBTC Safety Management PDFDocument10 pagesCBTC Safety Management PDFVeeresh T KumbarNo ratings yet
- Fundamentals of Implementation of Safety Movement of Trains Under Integration of Control Systems With Hardware For Railway Infrastructure Facilities MonitoringDocument6 pagesFundamentals of Implementation of Safety Movement of Trains Under Integration of Control Systems With Hardware For Railway Infrastructure Facilities MonitoringJamil Kalil Naufal JuniorNo ratings yet
- IRSC - Cost Effective System For Railway Level Crossing Protection PDFDocument42 pagesIRSC - Cost Effective System For Railway Level Crossing Protection PDFEm ChaisukniphatNo ratings yet
- 1 - MSC Thesis Proposal 2020-Ms-Rle-104 Kashif Ali 3Document10 pages1 - MSC Thesis Proposal 2020-Ms-Rle-104 Kashif Ali 3Ibrahim BajwaNo ratings yet
- Traffic MANAGEMENT THEORY BY EEHDocument14 pagesTraffic MANAGEMENT THEORY BY EEHEgesu HenryNo ratings yet
- 10 1016@j Ssci 2020 104768Document11 pages10 1016@j Ssci 2020 104768Admin Pelayanan Permintaan DarahNo ratings yet
- Cross Layer Based Congestion Free Route Selection in Vehicular Ad Hoc NetworksDocument18 pagesCross Layer Based Congestion Free Route Selection in Vehicular Ad Hoc NetworksAIRCC - IJCNCNo ratings yet
- Smart Signal Control System For Accident Prevention and Arterial Speed Harmonization Under Connected Vehicle EnvironmentDocument11 pagesSmart Signal Control System For Accident Prevention and Arterial Speed Harmonization Under Connected Vehicle Environmentchongqi heNo ratings yet
- Attitudes of Metro Drivers Towards Design of Immediate Physical Environment and System LayoutDocument8 pagesAttitudes of Metro Drivers Towards Design of Immediate Physical Environment and System LayoutAlok MandalNo ratings yet
- InTech-Kalman Filter Applications For Traffic ManagementDocument29 pagesInTech-Kalman Filter Applications For Traffic ManagementTri WinotoNo ratings yet
- Getaneh AmeneDocument65 pagesGetaneh AmenetmmNo ratings yet
- A Broadcast Vehicle To Vehicle Communication SysteDocument7 pagesA Broadcast Vehicle To Vehicle Communication Syste다원시스No ratings yet
- Sciencedirect: A Factor Analysis of Urban Railway Casualty Accidents and Establishment of Preventive Response SystemsDocument10 pagesSciencedirect: A Factor Analysis of Urban Railway Casualty Accidents and Establishment of Preventive Response SystemsOSAMANo ratings yet
- AAR PTC Fact SheetDocument2 pagesAAR PTC Fact Sheetrogelio mezaNo ratings yet
- Inter-Vehicular Communication Using Packet Network TheoryDocument7 pagesInter-Vehicular Communication Using Packet Network TheoryInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Improving Railway Safety With Obstacle Detection and Tracking System Using GPS-GSM ModelDocument7 pagesImproving Railway Safety With Obstacle Detection and Tracking System Using GPS-GSM ModelFìrœ Lōv MånNo ratings yet
- IOT TrackDocument7 pagesIOT TrackShantanu SinghNo ratings yet
- Development of Traffic Safety Evaluation Method Based On Simulated Conflicts at Signalized IntersectionsDocument5 pagesDevelopment of Traffic Safety Evaluation Method Based On Simulated Conflicts at Signalized IntersectionsCristian NaizaqueNo ratings yet
- Energy-Efficient Wireless MAC Protocols For Railway Monitoring ApplicationsDocument11 pagesEnergy-Efficient Wireless MAC Protocols For Railway Monitoring Applicationstariq76No ratings yet
- Train DelayDocument11 pagesTrain DelayVidhya RajNo ratings yet
- Literature SurveyDocument4 pagesLiterature SurveyThiruChNo ratings yet
- Research On The Application of Fuzzy Bayesian NetwDocument19 pagesResearch On The Application of Fuzzy Bayesian NetwFatih AtaselimNo ratings yet
- Railway Wagon MonitoringDocument11 pagesRailway Wagon MonitoringAyshwar VenkateshNo ratings yet
- Intelligent Transportation Systems - Problems and PerspectivesDocument307 pagesIntelligent Transportation Systems - Problems and Perspectives李传兴No ratings yet
- ATS Vol 1-Issue 2Document15 pagesATS Vol 1-Issue 2kwonheechoiNo ratings yet
- Traffic Signs and SignalsDocument4 pagesTraffic Signs and SignalsAlvin John BatinNo ratings yet
- Conference PaperDocument4 pagesConference PaperHelenaNo ratings yet
- Role of SMS CanadaDocument27 pagesRole of SMS CanadaTuan Anh LuongNo ratings yet
- Vijayalakshmi.G-AI Based Rush Collision Prevention in RailwaysDocument9 pagesVijayalakshmi.G-AI Based Rush Collision Prevention in RailwaysAnil KumarNo ratings yet
- Simulation of Zigbee Based Tacs For Collision Detection and Avoidance For Railway TrafficDocument5 pagesSimulation of Zigbee Based Tacs For Collision Detection and Avoidance For Railway Trafficprinceram123No ratings yet
- Development of A Smart Railway System For BangladeshDocument6 pagesDevelopment of A Smart Railway System For BangladeshAchmad Agus Eko'bNo ratings yet
- 23 Developing A New Real-Time Traffic Safety Management Framework For Urban Expressways Utilizing Reinforcement Learning Tree.Document13 pages23 Developing A New Real-Time Traffic Safety Management Framework For Urban Expressways Utilizing Reinforcement Learning Tree.felicitywxxNo ratings yet
- Pedestrian Safety Management System Using Automatically Retractable BollardsDocument7 pagesPedestrian Safety Management System Using Automatically Retractable BollardsAdvanced ClassesNo ratings yet
- Literature Review On Railway Track Security SystemDocument6 pagesLiterature Review On Railway Track Security SystemaflsjizafNo ratings yet
- Cyber Security Awareness and Educational Outcomes of Grade 4 LearnersDocument33 pagesCyber Security Awareness and Educational Outcomes of Grade 4 LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Factors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaDocument6 pagesFactors Influencing The Use of Improved Maize Seed and Participation in The Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueDocument2 pagesParastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Health Care SystemDocument8 pagesSmart Health Care SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Blockchain Based Decentralized ApplicationDocument7 pagesBlockchain Based Decentralized ApplicationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unmasking Phishing Threats Through Cutting-Edge Machine LearningDocument8 pagesUnmasking Phishing Threats Through Cutting-Edge Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Study Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoDocument6 pagesStudy Assessing Viability of Installing 20kw Solar Power For The Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Industry That Capitalizes Off of Women's Insecurities?Document8 pagesAn Industry That Capitalizes Off of Women's Insecurities?International Journal of Innovative Science and Research TechnologyNo ratings yet
- Visual Water: An Integration of App and Web To Understand Chemical ElementsDocument5 pagesVisual Water: An Integration of App and Web To Understand Chemical ElementsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Insights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocument8 pagesInsights Into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Cities: Boosting Economic Growth Through Innovation and EfficiencyDocument19 pagesSmart Cities: Boosting Economic Growth Through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parkinson's Detection Using Voice Features and Spiral DrawingsDocument5 pagesParkinson's Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Impact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldDocument6 pagesImpact of Silver Nanoparticles Infused in Blood in A Stenosed Artery Under The Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in A Sten. Art. Under The Eff. of Mag. FieldInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Compact and Wearable Ventilator System For Enhanced Patient CareDocument4 pagesCompact and Wearable Ventilator System For Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Air Quality Index Prediction Using Bi-LSTMDocument8 pagesAir Quality Index Prediction Using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Predict The Heart Attack Possibilities Using Machine LearningDocument2 pagesPredict The Heart Attack Possibilities Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Investigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatDocument16 pagesInvestigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship Between Teacher Reflective Practice and Students Engagement in The Public Elementary SchoolDocument31 pagesThe Relationship Between Teacher Reflective Practice and Students Engagement in The Public Elementary SchoolInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- An Analysis On Mental Health Issues Among IndividualsDocument6 pagesAn Analysis On Mental Health Issues Among IndividualsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewDocument6 pagesImplications of Adnexal Invasions in Primary Extramammary Paget's Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Harnessing Open Innovation For Translating Global Languages Into Indian LanuagesDocument7 pagesHarnessing Open Innovation For Translating Global Languages Into Indian LanuagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Keywords:-Ibadhy Chooranam, Cataract, Kann Kasam,: Siddha Medicine, Kann NoigalDocument7 pagesKeywords:-Ibadhy Chooranam, Cataract, Kann Kasam,: Siddha Medicine, Kann NoigalInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix Dactylifera) Leaf Fiber As A Main Component in Making An Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix Dactylifera) Leaf Fiber As A Main Component in Making An Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions On Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions On Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning For Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning For Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Object Recognition Eyeglasses For The Visually Impaired Using Image AIDocument6 pagesThe Making of Object Recognition Eyeglasses For The Visually Impaired Using Image AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing As An Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains - CameroonDocument14 pagesTerracing As An Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains - CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Free Pre-Demolition Checklist - 2021 EditionDocument2 pagesFree Pre-Demolition Checklist - 2021 EditionBillyNo ratings yet
- Managing Business Risk in NigeriaDocument15 pagesManaging Business Risk in NigeriaIfeanyin OkoloNo ratings yet
- Advancing Road Safety in India Summary Report PDFDocument31 pagesAdvancing Road Safety in India Summary Report PDFwasu sheebuNo ratings yet
- Crushing/ Amputation of Limbs: Maintenance - No.51 Waste Compactor And/or BalerDocument2 pagesCrushing/ Amputation of Limbs: Maintenance - No.51 Waste Compactor And/or Balersuriya karthikeyanNo ratings yet
- Kone Technical SubmittalDocument151 pagesKone Technical Submittalzampacaanas73% (11)
- IOSH Paper For APOSHO 31 On ISO 45001Document7 pagesIOSH Paper For APOSHO 31 On ISO 45001hamidsohailNo ratings yet
- Word 134087Document14 pagesWord 134087ghanbari8668No ratings yet
- Chain Feeding System: Installation and Operation ManualDocument76 pagesChain Feeding System: Installation and Operation ManualA.K.M.Mustafa KamalNo ratings yet
- Safety InductionDocument10 pagesSafety InductionShabio 926No ratings yet
- Emergency Response Procedure For All Areas - Rev.0Document5 pagesEmergency Response Procedure For All Areas - Rev.0SheikhFarid100% (1)
- Bomag BMP 8500 Operating and Maintenance ManualDocument128 pagesBomag BMP 8500 Operating and Maintenance ManualIslam AttiaNo ratings yet
- Labour Welfare & Safety: Ms. Dulari S.SDocument14 pagesLabour Welfare & Safety: Ms. Dulari S.SRiya RajuNo ratings yet
- MSDS Bimoli Botol & Pouch PDFDocument3 pagesMSDS Bimoli Botol & Pouch PDFDwi Puji RahayuNo ratings yet
- Workers AccomodationDocument38 pagesWorkers Accomodationadeoye_okunoye100% (1)
- A16 ManualDocument14 pagesA16 ManualBrigith VelasquezNo ratings yet
- Backfill: Analisa Keselamatan KerjaDocument3 pagesBackfill: Analisa Keselamatan KerjaEthos SeptiansyahNo ratings yet
- Sample Written Hazard Communication ProgramDocument3 pagesSample Written Hazard Communication ProgramLiz CNo ratings yet
- Food Safety 1 3Document29 pagesFood Safety 1 3JadeFragaNo ratings yet
- Eucalyptus Oil Natural: Safety Data SheetDocument8 pagesEucalyptus Oil Natural: Safety Data SheetKhan Abdul BasitNo ratings yet
- SDS Moplen EP340KDocument15 pagesSDS Moplen EP340KafidyusufNo ratings yet
- Failure Mode, Effects, and Criticality AnalysisDocument8 pagesFailure Mode, Effects, and Criticality AnalysisFederico VillagránNo ratings yet
- IOSH Managing SafelyDocument79 pagesIOSH Managing SafelyMuhammad IrfanNo ratings yet
- Course Prospectus 2010Document50 pagesCourse Prospectus 2010SV SANKARAMOORTHYNo ratings yet
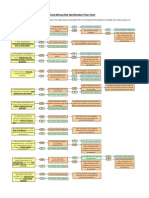
- Coal Mining Risk Identification Flow ChartDocument1 pageCoal Mining Risk Identification Flow ChartZ Babar Khan100% (1)
- Pankaj BhattDocument4 pagesPankaj Bhattpankajbhatt376No ratings yet
- B U L L E T I N: Application EngineeringDocument7 pagesB U L L E T I N: Application EngineeringMaria DazaNo ratings yet
- FGL Distribution 2016 Asset Management PlanDocument195 pagesFGL Distribution 2016 Asset Management PlanAbhishek Ranjan SinghNo ratings yet
- Pocket Guide VibrationsDocument23 pagesPocket Guide VibrationsMani Rathinam RajamaniNo ratings yet
- Petrol Petrol Filling StationsDocument4 pagesPetrol Petrol Filling StationsFairuz HaykalNo ratings yet
- Method Statement For Civil Works For Control BuildingDocument26 pagesMethod Statement For Civil Works For Control BuildingUtku Can KılıçNo ratings yet