You might also like
- Procédures Anormales Et D'urgence Du Drone (Trinity F90+)Document2 pagesProcédures Anormales Et D'urgence Du Drone (Trinity F90+)waNo ratings yet
- QS TrinityTac TechSheet 8.5x11 BS32mm 230425Document2 pagesQS TrinityTac TechSheet 8.5x11 BS32mm 230425Michael LatoNo ratings yet
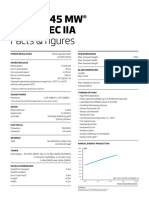
- Facts & Figures: V126-3.45 MW® Iec Iib/Iec IiaDocument1 pageFacts & Figures: V126-3.45 MW® Iec Iib/Iec IiaJulian Andres Tovar RuizNo ratings yet
- TF90 LIDAR Qube240 V001Document1 pageTF90 LIDAR Qube240 V001Presa KautsarNo ratings yet
- Katalog QuantumDocument9 pagesKatalog QuantumBrian Bagus AriantoNo ratings yet
- 4 MW Product BrochureDocument2 pages4 MW Product BrochureAdrian Martin BarrionuevoNo ratings yet
- QS TrinityF90 Overview 220912Document2 pagesQS TrinityF90 Overview 220912Presa KautsarNo ratings yet
- Optex VXI RAMDocument2 pagesOptex VXI RAMsabine.morvanNo ratings yet
- CIVE1400 Fluid Mechanics Examples AnswerDocument32 pagesCIVE1400 Fluid Mechanics Examples Answerbhilacarlos10No ratings yet
- Fluid Statics ExamplesDocument14 pagesFluid Statics ExamplesJoy CloradoNo ratings yet
- Fiche Descriptive Quantum Trinity TF90Document1 pageFiche Descriptive Quantum Trinity TF90waNo ratings yet
- Embeded Depth of Pole Foundation Site Mozambique Method 1: Rule of Thumb MethodDocument4 pagesEmbeded Depth of Pole Foundation Site Mozambique Method 1: Rule of Thumb Methodvishnumani3011No ratings yet
- V120-2.2 MW™ Iec Iib/Iec S Facts & Figures: Serrated Trailing Edge Technology Available To Reduce Sound Power LevelDocument2 pagesV120-2.2 MW™ Iec Iib/Iec S Facts & Figures: Serrated Trailing Edge Technology Available To Reduce Sound Power Levelzahir diazNo ratings yet
- Fluid Mechanic AnswerDocument32 pagesFluid Mechanic AnswerIser88% (40)
- Pilatus Aircraft LTD PC 21 ModelBuildingPlanDocument7 pagesPilatus Aircraft LTD PC 21 ModelBuildingPlanAlfredo Arnéz Paz Soldán0% (1)
- Dream The Convergence Future With Drone and Iot Technology: Ground Control SystemDocument2 pagesDream The Convergence Future With Drone and Iot Technology: Ground Control SystemNeelakanta Kalla100% (1)
- Bolt X: Longest Arm Reach of Our High Speed EquipmentDocument2 pagesBolt X: Longest Arm Reach of Our High Speed Equipmentprudhvi chowdaryNo ratings yet
- Triple Combo LWD Package Enables High Dogleg Sidetrack, Saves 50 Days and $4 MillionDocument2 pagesTriple Combo LWD Package Enables High Dogleg Sidetrack, Saves 50 Days and $4 MillionPanu PhumtabtimNo ratings yet
- Wadd - Warr: NotesDocument5 pagesWadd - Warr: NotesAndhikaPutraNo ratings yet
- A World Leading Outdoor Detector: SeriesDocument2 pagesA World Leading Outdoor Detector: Seriessydney simonNo ratings yet
- 2 - Pilatus PC6 SplitPilatus Aircraft LTD PC 6 ModelBuildingPlanDocument1 page2 - Pilatus PC6 SplitPilatus Aircraft LTD PC 6 ModelBuildingPlanRey JulienNo ratings yet
- P330 Pro DS enDocument4 pagesP330 Pro DS enPresa KautsarNo ratings yet
- Pilatus Aircraft LTD PC 6 ModelBuildingPlanDocument6 pagesPilatus Aircraft LTD PC 6 ModelBuildingPlanRey JulienNo ratings yet
- Pilatus Aircraft LTD - Factsheet PC-12Document2 pagesPilatus Aircraft LTD - Factsheet PC-12Adan Fraga100% (1)
- DSJ400 Outlined SpecificationDocument2 pagesDSJ400 Outlined SpecificationjrladduNo ratings yet
- Load Calculations - Toll CanopyDocument8 pagesLoad Calculations - Toll Canopyvikash kumar100% (2)
- Navigation Tools - SB 1.0Document14 pagesNavigation Tools - SB 1.0Pavel ViktorNo ratings yet
- Trinity ProDocument16 pagesTrinity ProMichael LatoNo ratings yet
- SOTP - Baja PagDocument4 pagesSOTP - Baja PagRif NADORNo ratings yet
- Specification JB 117 2017Document2 pagesSpecification JB 117 2017Anonymous PibYPghNo ratings yet
- Truck Loader Crane: For Heavy-Duty VehicleDocument2 pagesTruck Loader Crane: For Heavy-Duty Vehicleryo asg3No ratings yet
- Ddbc0275 Factsheet-Cs300 en v8Document2 pagesDdbc0275 Factsheet-Cs300 en v8ngmo34No ratings yet
- TADANO 80ton GR-800EX - Specification & Load Chart PDFDocument13 pagesTADANO 80ton GR-800EX - Specification & Load Chart PDFBruce Li0% (1)
- Sterilgard CampanaDocument1 pageSterilgard CampanaLeon GarciaNo ratings yet
- Maersk Discoverer PDFDocument12 pagesMaersk Discoverer PDFAarón CespedesNo ratings yet
- 8,000 NM 7,000 NM: Upto4 0.925Document2 pages8,000 NM 7,000 NM: Upto4 0.925better pasaribuNo ratings yet
- Input: Apparent Time PeroidDocument4 pagesInput: Apparent Time PeroidMahdi FekiNo ratings yet
- Asdmnd ClkahsdlkjnlkjbkbDocument3 pagesAsdmnd ClkahsdlkjnlkjbkbYamil GalindoNo ratings yet
- Maersk Developer PDFDocument12 pagesMaersk Developer PDFmuhammad rivaiNo ratings yet
- Rangkuman Catatan CopiedDocument6 pagesRangkuman Catatan CopiedFAHMI PRAYOGINo ratings yet
- Falcon 8 Plus Datasheet 7010 2243 Reva SM 1Document2 pagesFalcon 8 Plus Datasheet 7010 2243 Reva SM 1வேல் முருகன்No ratings yet
- Hyperspectral Camera On DJI Drone FS60Document1 pageHyperspectral Camera On DJI Drone FS60Drones OmarNo ratings yet
- Wingtra ManualDocument1 pageWingtra ManualAgus Cahyadi100% (1)
- Catalogue of European Urban Wind Turbine ManufacturersDocument61 pagesCatalogue of European Urban Wind Turbine ManufacturersRoxana G. MantaNo ratings yet
- Line Tension and Pole StrengthDocument34 pagesLine Tension and Pole StrengthDon BunNo ratings yet
- Fluid Mechanics Examples and Answers: July 2016Document33 pagesFluid Mechanics Examples and Answers: July 2016bandulaNo ratings yet
- Trnasportador TELEBELT MXTB130MXTB600Document2 pagesTrnasportador TELEBELT MXTB130MXTB600yony choqueñaNo ratings yet
- Mars 2020 Entry Descent and Landing Update (June-2018)Document14 pagesMars 2020 Entry Descent and Landing Update (June-2018)Luis ContrerasNo ratings yet
- Chcnav Uav Vtol p330 ProDocument4 pagesChcnav Uav Vtol p330 ProNainNo ratings yet
- DIVERT STP DISCHARGE-rev2Document5 pagesDIVERT STP DISCHARGE-rev2zms msswiNo ratings yet
- Ancu3 Sounding 2018 1Document20 pagesAncu3 Sounding 2018 1Titis Angger PangestuNo ratings yet
- 3.4 Meteorological Sensors: 3.4.1 Atmospheric Pressure SensorDocument25 pages3.4 Meteorological Sensors: 3.4.1 Atmospheric Pressure SensorPavel KubešNo ratings yet
- Data SheetDocument2 pagesData SheetRaymundo AlarconNo ratings yet
- Fortune - Tafadzwa - Madzivo - Infrastructure & Cyber Security OfficerDocument4 pagesFortune - Tafadzwa - Madzivo - Infrastructure & Cyber Security OfficerFortune Tafadzwa MadzivoNo ratings yet
- Cafés/Bars in Vietnam: Euromonitor International April 2019Document10 pagesCafés/Bars in Vietnam: Euromonitor International April 2019Nguyễn ThuNo ratings yet
- In-Depth Look at Football TacticsDocument104 pagesIn-Depth Look at Football Tacticsbolebs14100% (1)
- The Three BearsDocument4 pagesThe Three Bearsmanbg100% (1)
- CV TemplateDocument2 pagesCV Templatewill choeneNo ratings yet
- Fashion and Function With Stretch FabricsDocument2 pagesFashion and Function With Stretch FabricsMaria MirandaNo ratings yet
- AnaheimDocument29 pagesAnaheimdonotreply.nutriboomNo ratings yet
- Jisicom - Smart System of Fast Internet Access Development Using Backbone Network MethodDocument9 pagesJisicom - Smart System of Fast Internet Access Development Using Backbone Network MethodVerdi YasinNo ratings yet
- Main Practice 1Document7 pagesMain Practice 1sureshrnalNo ratings yet
- Daftar Link Limacahayanatv NewDocument7 pagesDaftar Link Limacahayanatv NewPenoz NovanNo ratings yet
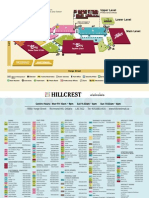
- Hillcrest Floor PlanDocument2 pagesHillcrest Floor PlanscriptkittiesNo ratings yet
- CPA and PCA NO ANSWERDocument5 pagesCPA and PCA NO ANSWERAmphee ZyNo ratings yet
- B. I'd Like To Be A Pilot. C. I Like PilotsDocument8 pagesB. I'd Like To Be A Pilot. C. I Like PilotsMỹ HàNo ratings yet
- Markhor Service and Travel Change GuideDocument28 pagesMarkhor Service and Travel Change GuideKristy Hill100% (1)
- ESMT Case StudyDocument4 pagesESMT Case StudyARVIND PATELNo ratings yet
- ListDocument34 pagesListPendidikan FisikaNo ratings yet
- EIDER Product GuideDocument2 pagesEIDER Product Guidemev sterNo ratings yet
- Topic 7 Cardiorespiratory Adaptations To TrainingDocument26 pagesTopic 7 Cardiorespiratory Adaptations To TrainingCikguAmelia100% (1)
- Once A Week Comprehension Book 1 Answers: Test 1Document30 pagesOnce A Week Comprehension Book 1 Answers: Test 1Syed Ashar75% (4)
- Aquabot Turbo ManualDocument32 pagesAquabot Turbo ManualJAVIERNo ratings yet
- Anurag DixitDocument1 pageAnurag DixitPrajwal AlvaNo ratings yet
- Nacipo Justine Bel C - Strategic PricingDocument2 pagesNacipo Justine Bel C - Strategic PricingJustine nacipoNo ratings yet
- Nool ListDocument3 pagesNool ListJana PlusNo ratings yet
- Hanoi - Ho Chi Minh Travel Guide BookDocument146 pagesHanoi - Ho Chi Minh Travel Guide BookcitypassguideNo ratings yet
- POULTRYDocument16 pagesPOULTRYcutiepattotieNo ratings yet
- Ambition Macbeth 3rd DraftDocument5 pagesAmbition Macbeth 3rd DraftDCHSsoccer25071725No ratings yet
- Progress ReportDocument15 pagesProgress ReportConception & Fabrication MécaniqueNo ratings yet
- Tron AIS TR-8000: Automatic Identification System Class ADocument2 pagesTron AIS TR-8000: Automatic Identification System Class Amehdi moghimiNo ratings yet
- Batre LithiumDocument7 pagesBatre LithiumihsanjuNo ratings yet
- Penelitian Film Kota SaranjanaDocument8 pagesPenelitian Film Kota Saranjanaarsylshop08No ratings yet