You might also like
- Simpson's 1/3 Rule of IntegrationDocument12 pagesSimpson's 1/3 Rule of Integrationap021100% (1)
- User Manual SmartElex 15S DC Motor Driver 15A 30A PeakDocument14 pagesUser Manual SmartElex 15S DC Motor Driver 15A 30A PeakRakesh KurhadeNo ratings yet
- Current Dc3iobDocument14 pagesCurrent Dc3iobsunhuynhNo ratings yet
- L298motor PDFDocument12 pagesL298motor PDFpnkjinamdarNo ratings yet
- L298motor PDFDocument12 pagesL298motor PDFpnkjinamdarNo ratings yet
- L298MOTORDocument12 pagesL298MOTORTonmoyNo ratings yet
- G70364a STD ManDocument30 pagesG70364a STD Mannyaa_joelNo ratings yet
- Microcontrolador msp430g2231Document61 pagesMicrocontrolador msp430g2231Miguel Angel DkNo ratings yet
- I/O Pin Multiplexing and GPIO ControlDocument9 pagesI/O Pin Multiplexing and GPIO ControlAkash ThakurNo ratings yet
- P1C680813Document9 pagesP1C680813Monse LNo ratings yet
- 07-Design and Implementation of Smart Energy MeterDocument59 pages07-Design and Implementation of Smart Energy MeterAvetri VigneshwaranNo ratings yet
- Easyio FG 20Document24 pagesEasyio FG 20Syed Mohammad NaveedNo ratings yet
- 7SL86 P1C185365Document8 pages7SL86 P1C185365Krishnan KrishNo ratings yet
- Chapter 2 - 8051 Microcontroller ArchitectureDocument27 pagesChapter 2 - 8051 Microcontroller ArchitectureAgxin M J Xavier100% (1)
- 06-Smart Solar Tracking System For Optimal Power GenerationDocument44 pages06-Smart Solar Tracking System For Optimal Power GenerationAvetri VigneshwaranNo ratings yet
- Getting Started With PIC Microcontroller - CCS C Compiler PDFDocument19 pagesGetting Started With PIC Microcontroller - CCS C Compiler PDFNithya100% (2)
- WWW Microbuilder Eu Tutorials LPC2148 GPIO GPIOMOSFET AspxDocument3 pagesWWW Microbuilder Eu Tutorials LPC2148 GPIO GPIOMOSFET AspxcrsarinNo ratings yet
- Encore™ Usb Combination Low-Speed Usb and Ps/2 Peripheral ControllerDocument53 pagesEncore™ Usb Combination Low-Speed Usb and Ps/2 Peripheral Controllervietanh_askNo ratings yet
- Driver Capy C11G Cnc4pcDocument19 pagesDriver Capy C11G Cnc4pccastellano_rNo ratings yet
- User's Manual Pic32 Start KitDocument36 pagesUser's Manual Pic32 Start Kitlxz5101100% (1)
- BotboarduinomanualDocument8 pagesBotboarduinomanualAlvaroNo ratings yet
- SIPROTEC 5 - Transformer Protection ConfigurationDocument8 pagesSIPROTEC 5 - Transformer Protection ConfigurationAndresNo ratings yet
- Cdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Document27 pagesCdr-4Mps / Cdr-8Mps Users Guide: CDR Series Revision Date: 07/12/06Vlad PkNo ratings yet
- 6MD61xx Catalog SIP-2008 enDocument8 pages6MD61xx Catalog SIP-2008 enWaleed AhmedNo ratings yet
- Dio PSC en 02Document3 pagesDio PSC en 02ohussienNo ratings yet
- Busworks 900Mb Series Modbus-Rtu I/ODocument23 pagesBusworks 900Mb Series Modbus-Rtu I/OOmar RobaNo ratings yet
- User Manual - SN-138020 - Atmega-8 Mother BoardDocument11 pagesUser Manual - SN-138020 - Atmega-8 Mother BoardUrsap Buddy100% (1)
- P1G442419Document6 pagesP1G442419Control&Ensayos CalidadNo ratings yet
- P1J916598Document8 pagesP1J916598ethenNo ratings yet
- 2.microcontroller Based Transformer Health Monitoring System Using IotDocument38 pages2.microcontroller Based Transformer Health Monitoring System Using IotDinesh KumarNo ratings yet
- Unit-Iv Microcontroller Fundamentals For Basic Programming: GpiosDocument21 pagesUnit-Iv Microcontroller Fundamentals For Basic Programming: GpiossrikanthNo ratings yet
- Section 2 - Port Control On SAMD20: TasksDocument18 pagesSection 2 - Port Control On SAMD20: TasksjmsaakNo ratings yet
- Industrial security system using microcontroller programmingDocument6 pagesIndustrial security system using microcontroller programmingnaveenraj111No ratings yet
- 12 Catalog SIP E7 Substation AutomationDocument33 pages12 Catalog SIP E7 Substation AutomationsherubdNo ratings yet
- SKR PRO V1.1 User ManualDocument14 pagesSKR PRO V1.1 User ManualRobert Hilton100% (1)
- 2080 sg001 - en P PDFDocument64 pages2080 sg001 - en P PDFAlaa RamadanNo ratings yet
- P8X32A QuickStart Guide v1.3Document6 pagesP8X32A QuickStart Guide v1.3Benjamin DoverNo ratings yet
- L.D. College of Engineering, Gujarat Technological UniversityDocument10 pagesL.D. College of Engineering, Gujarat Technological UniversityBadshah ParmarNo ratings yet
- Motor Control Reference GuideDocument48 pagesMotor Control Reference GuidedcesentherNo ratings yet
- Laboratory2 Marking SchemeDocument12 pagesLaboratory2 Marking SchemeAmna EhtshamNo ratings yet
- SIPROTEC 5 - Configuration: Technical DataDocument6 pagesSIPROTEC 5 - Configuration: Technical DataMARTINCORTES1992No ratings yet
- Bluetooth Controlled Mecanum Wheel Robot AbstractDocument12 pagesBluetooth Controlled Mecanum Wheel Robot AbstractZeynal Abidin ŞabaşNo ratings yet
- System Controllers: A Navya Vishnu 1210410304Document33 pagesSystem Controllers: A Navya Vishnu 1210410304Ananda KrishnaNo ratings yet
- Remote CommunicationDocument4 pagesRemote Communicationwagner_guimarães_1100% (1)
- An-1202 - Design Considerations For IGBT in Inverters and DrivesDocument30 pagesAn-1202 - Design Considerations For IGBT in Inverters and Drivesjlruizmat8679No ratings yet
- 02-Wireless Low Cost Power Monitoring and Management SystemDocument50 pages02-Wireless Low Cost Power Monitoring and Management SystemAvetri VigneshwaranNo ratings yet
- Application Note 1335: Main Applications and Selection of Gate Driver OptocouplersDocument8 pagesApplication Note 1335: Main Applications and Selection of Gate Driver OptocouplerselecompinnNo ratings yet
- E560 CMG10 CSDocument8 pagesE560 CMG10 CSYasser RagabNo ratings yet
- Arduino Irf520 Mosfet Driver ModuleDocument11 pagesArduino Irf520 Mosfet Driver ModuleSisil BandaraNo ratings yet
- TMS320F2812 - Digital I/ODocument30 pagesTMS320F2812 - Digital I/OPantech ProLabs India Pvt LtdNo ratings yet
- Training ReportDocument43 pagesTraining ReportTarus DssNo ratings yet
- Controlador de BAHIA Siemens 6MD61Document7 pagesControlador de BAHIA Siemens 6MD61mjbriceno@gmail.comNo ratings yet
- 07 KT 97Document54 pages07 KT 97max_ingNo ratings yet
- Introduction To Controls & Robotics: EC2481 Year 02 - Semester 02 (2019)Document34 pagesIntroduction To Controls & Robotics: EC2481 Year 02 - Semester 02 (2019)Heshan GamageNo ratings yet
- P1C616041Document8 pagesP1C616041Torrez JeanNo ratings yet
- Laboratory2 IoTDocument11 pagesLaboratory2 IoTfa20-bce-046No ratings yet
- DataSheet 16v8Document23 pagesDataSheet 16v8Sergio Alberto Olivas LoredoNo ratings yet
- 1Document29 pages1Ronniel de RamosNo ratings yet
- MSP430Document48 pagesMSP430abab74No ratings yet
- GSM Based Car Engine Control System To Detect Car TheftDocument24 pagesGSM Based Car Engine Control System To Detect Car TheftPriya Ammu100% (1)
- Touch Screen HOW DOES IT WORKDocument1 pageTouch Screen HOW DOES IT WORKJeya RamanNo ratings yet
- SMB101 PDFDocument4 pagesSMB101 PDFJeya RamanNo ratings yet
- 80.safety Parsel Courier SystemDocument3 pages80.safety Parsel Courier SystemRambhupalReddyNo ratings yet
- Automation of OFF - Grid Solar Based SystemDocument2 pagesAutomation of OFF - Grid Solar Based SystemJeya RamanNo ratings yet
- Touch Screen Based Industrial Device Management SystemDocument3 pagesTouch Screen Based Industrial Device Management SystemRambhupalReddyNo ratings yet
- My Distance EditeDocument1 pageMy Distance EditeJeya RamanNo ratings yet
- Tilt MeasuremtnDocument18 pagesTilt MeasuremtnridwantpNo ratings yet
- Pic ControllerDocument12 pagesPic ControllerJeya RamanNo ratings yet
- Datasheet Datasheet Datasheet Datasheet: DocumentationDocument3 pagesDatasheet Datasheet Datasheet Datasheet: DocumentationJeya RamanNo ratings yet
- Using The Serial Port With A MATLAB GUIDocument34 pagesUsing The Serial Port With A MATLAB GUIJeya RamanNo ratings yet
- lm2576 PDFDocument26 pageslm2576 PDFNguyen DucNo ratings yet
- Instrumentation Training Tutorial Part2Document25 pagesInstrumentation Training Tutorial Part2Gary8100% (1)
- WSN-based Large Electrical Equipment MonitoringDocument6 pagesWSN-based Large Electrical Equipment MonitoringJeya RamanNo ratings yet
- Creating OWASP ZAP Extensions and Add-Ons: Johanna CurielDocument20 pagesCreating OWASP ZAP Extensions and Add-Ons: Johanna CurielSabit IncomarNo ratings yet
- Administrator's Guide To VMware Virtual SANDocument63 pagesAdministrator's Guide To VMware Virtual SANHoang KhuyenNo ratings yet
- Latest RRB NTPC Exam Questions & AnswersDocument28 pagesLatest RRB NTPC Exam Questions & AnswerssalimNo ratings yet
- Head Count PayrollDocument2 pagesHead Count PayrollchaitanyaNo ratings yet
- The Art of Go Volume 2Document98 pagesThe Art of Go Volume 2Spiros Tramountanas100% (1)
- PowerPoint Slides To Chapter 07Document7 pagesPowerPoint Slides To Chapter 07Shreya DwivediNo ratings yet
- Porting NewlibDocument41 pagesPorting NewlibDavid Z. ChenNo ratings yet
- Internet Has Done More Harm Than Good in The SocietyDocument2 pagesInternet Has Done More Harm Than Good in The SocietyShashwatNo ratings yet
- BU 0950 - en TIA Standard Modules: Supplementary Manual Options For NORD - Frequency InvertersDocument48 pagesBU 0950 - en TIA Standard Modules: Supplementary Manual Options For NORD - Frequency InvertersRoberto BarranquillaNo ratings yet
- WalkthroughDocument31 pagesWalkthroughjairocardenasNo ratings yet
- Huawei Wi-Fi 6 METODOLOGIA (IEEE 802.11ax) Technology White PaperDocument29 pagesHuawei Wi-Fi 6 METODOLOGIA (IEEE 802.11ax) Technology White PaperLeidy ChNo ratings yet
- IJCRT22A6562Document8 pagesIJCRT22A6562sruthisrivenkateswaran SIESGSTNo ratings yet
- Switched Ethernet vs. Classic EthernetDocument3 pagesSwitched Ethernet vs. Classic EthernetDon WaltonNo ratings yet
- Basic Principles of Counseling ProcessDocument2 pagesBasic Principles of Counseling ProcessBhavna SinghalNo ratings yet
- 42,0426,0021, en PDFDocument248 pages42,0426,0021, en PDFJavi HerreraNo ratings yet
- Real-Time Kinematic and Differential GPS: PrintDocument13 pagesReal-Time Kinematic and Differential GPS: PrintBijay Krishna Das100% (1)
- QBASIC Notes: Algorithms, Psuedocode, and Problem SolvingDocument224 pagesQBASIC Notes: Algorithms, Psuedocode, and Problem SolvingAnkit DasNo ratings yet
- 1 - 1946 - B7 - NTC AmendmentsDocument13 pages1 - 1946 - B7 - NTC AmendmentsVilma Santos RectoNo ratings yet
- Firepower Management Center Configuration Guide, V6.6Document2,814 pagesFirepower Management Center Configuration Guide, V6.6WafikNo ratings yet
- Mixing Tips - Your Daily Mixing Tips - PDF - PRO 4Document5 pagesMixing Tips - Your Daily Mixing Tips - PDF - PRO 4Lucas eduardoNo ratings yet
- 4-LINE DISPLAY MODULE TITLEDocument15 pages4-LINE DISPLAY MODULE TITLEOneil ZárateNo ratings yet
- Movie Tickit Man SynopDocument10 pagesMovie Tickit Man SynopAnonymous g7uPednI100% (1)
- Screencast Videography PreprintDocument60 pagesScreencast Videography Preprintsita deliyana FirmialyNo ratings yet
- Pythontrainingtutorial 170613150508Document32 pagesPythontrainingtutorial 170613150508Ali M. RiyathNo ratings yet
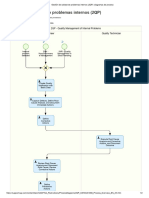
- Gestión de Calidad de Problemas Internos (2QP) - Diagramas de ProcesoDocument2 pagesGestión de Calidad de Problemas Internos (2QP) - Diagramas de ProcesoDiego CincottaNo ratings yet
- Log TestingDocument188 pagesLog Testingமுத்து செல்வன்No ratings yet
- Chapter Wise Question BankDocument15 pagesChapter Wise Question BankManoj KavediaNo ratings yet
- Document-SAP EWM For Fashion 1.0: 1.general IntroductionDocument3 pagesDocument-SAP EWM For Fashion 1.0: 1.general IntroductionAnonymous u3PhTjWZRNo ratings yet
- Storytelling - Design Research TechniquesDocument4 pagesStorytelling - Design Research TechniquesPaolo BartoliNo ratings yet