You might also like
- Chapter - 1Document34 pagesChapter - 1Yuva RajNo ratings yet
- REPORT ON MECHANICAL POWER TRANSMISSIONDocument15 pagesREPORT ON MECHANICAL POWER TRANSMISSIONabdullah 3mar abou reashaNo ratings yet
- Core Cutting Machine Ijariie12718Document5 pagesCore Cutting Machine Ijariie12718Habteyes AbateNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- A Project Report Gearless Power TransmissionDocument29 pagesA Project Report Gearless Power Transmissiondon131188No ratings yet
- Gearless TransmissionDocument67 pagesGearless TransmissionPSNo ratings yet
- Title: Design and Analysis of Gearless Transmission SystemDocument6 pagesTitle: Design and Analysis of Gearless Transmission SystemLokeshNo ratings yet
- Ijresm V2 I11 98Document2 pagesIjresm V2 I11 98madhanreddy953No ratings yet
- Tutorial 3 Josephine Bakewa IDDocument10 pagesTutorial 3 Josephine Bakewa IDJosephine BakewaNo ratings yet
- Design and Fabrication of Box Transport Mechanism PDFDocument5 pagesDesign and Fabrication of Box Transport Mechanism PDFBharathNo ratings yet
- Gearless Transmission: College of Engineering &technology Ghatikia, Bhubaneswar, Odisha - 751003, IndiaDocument32 pagesGearless Transmission: College of Engineering &technology Ghatikia, Bhubaneswar, Odisha - 751003, IndiahiteshNo ratings yet
- Design and Development of Box Shifting Mechanism Using Gearless Power Transmission System1Document5 pagesDesign and Development of Box Shifting Mechanism Using Gearless Power Transmission System1International Journal of Innovative Science and Research TechnologyNo ratings yet
- Chain Mechanism Prototype Lifts ObjectsDocument13 pagesChain Mechanism Prototype Lifts ObjectsTanveer WaniNo ratings yet
- Unit 2 BCME NotesDocument43 pagesUnit 2 BCME NotesMANOJKUMAR MNo ratings yet
- Full Report Gearless TransmissionDocument33 pagesFull Report Gearless TransmissionVivace SystmNo ratings yet
- Project ReferDocument5 pagesProject ReferTYMB 29 Prasad GirdhariNo ratings yet
- 89 Research Paper PDFDocument5 pages89 Research Paper PDFsnehax2No ratings yet
- Irjet V3i4662 PDFDocument12 pagesIrjet V3i4662 PDFJeevan Landge Patil100% (1)
- Problem DefinitionDocument3 pagesProblem DefinitionGaurav PawarNo ratings yet
- Gearless Transmission Using Elbow MechanismDocument32 pagesGearless Transmission Using Elbow Mechanismsanoop joseNo ratings yet
- Shu TrsDocument4 pagesShu Trsshubham kumarNo ratings yet
- Paper 1Document7 pagesPaper 1EADummyNo ratings yet
- Electromagnetic Gear Shifter2Document12 pagesElectromagnetic Gear Shifter2Sanket Koyate SpeedsterNo ratings yet
- Ijmet 11 02 009Document7 pagesIjmet 11 02 009sivamadesh0409No ratings yet
- Efficient gearless transmission design using elbow mechanismDocument6 pagesEfficient gearless transmission design using elbow mechanismsageetha756No ratings yet
- Lab 1Document8 pagesLab 1Mansoob BukhariNo ratings yet
- Introduction of Gears:: 1.2 Gears For Parallel ShaftsDocument16 pagesIntroduction of Gears:: 1.2 Gears For Parallel ShaftsnareshNo ratings yet
- ST1503 020Document7 pagesST1503 020MainãNo ratings yet
- IJCRT22A6397Document5 pagesIJCRT22A6397Mobeen AyyazNo ratings yet
- Design and Fabrication of Gearless Power Transmisson in Angular Positions Using RodsDocument5 pagesDesign and Fabrication of Gearless Power Transmisson in Angular Positions Using RodsSiddhartha Jain100% (1)
- Gearless Mechanism at Right AngleDocument13 pagesGearless Mechanism at Right AngleAkshay Tatkare100% (1)
- Gear Drives and Coverting SystemsDocument11 pagesGear Drives and Coverting Systemsprashanth9.n.sNo ratings yet
- Linear and Planar Variable Reluctance Motors For Flexible Manufacturing CellsDocument4 pagesLinear and Planar Variable Reluctance Motors For Flexible Manufacturing Cellsarnika33No ratings yet
- The International Journal of Engineering and Science (The IJES)Document3 pagesThe International Journal of Engineering and Science (The IJES)theijes100% (1)
- Rotary-Linear Machines - A Survey: January 2010Document5 pagesRotary-Linear Machines - A Survey: January 2010Faisal MaqsoodNo ratings yet
- Power Generation Through Speed BreakersDocument22 pagesPower Generation Through Speed BreakersSaikumar MysaNo ratings yet
- 3 Design and Analysis of Gearless TransmissionDocument68 pages3 Design and Analysis of Gearless TransmissionRåjêßh M Ińtü100% (2)
- 360 Degree Conveyor Belt PDFDocument4 pages360 Degree Conveyor Belt PDFUpendra BingundiNo ratings yet
- Gearless Power TransmissionDocument3 pagesGearless Power TransmissionJayNo ratings yet
- Literature Review (Elbow Mechanism)Document15 pagesLiterature Review (Elbow Mechanism)Naveen ShuklaNo ratings yet
- Gearless TransmissionDocument51 pagesGearless TransmissionRoyalAryansNo ratings yet
- Design and Fabrication of Chainless BicycleDocument4 pagesDesign and Fabrication of Chainless BicycleGarish TerangNo ratings yet
- Design, Analysis and Fabrication of Shaft Driven MotorcycleDocument10 pagesDesign, Analysis and Fabrication of Shaft Driven MotorcycleIJRASETPublicationsNo ratings yet
- Transmisiones Flexibles: Nelson H Grimaldo Caldera Transmisiones Flexibles Maestra: Dania Honstein Dinámica de MaquinasDocument5 pagesTransmisiones Flexibles: Nelson H Grimaldo Caldera Transmisiones Flexibles Maestra: Dania Honstein Dinámica de MaquinasNELSON HERIBERTO GRIMALDO CALDERANo ratings yet
- Extra Project ReserchDocument5 pagesExtra Project Reserchsoham thumbreNo ratings yet
- Project PPT-2Document43 pagesProject PPT-2vennasrinivasrao4No ratings yet
- Electromechanical ActuatorsDocument4 pagesElectromechanical ActuatorsMohammed Asif NNo ratings yet
- Mass College ProjectDocument68 pagesMass College ProjectGLOBAL INFO-TECH KUMBAKONAMNo ratings yet
- Transmission of Motion and PowerDocument15 pagesTransmission of Motion and PowerAbhijit DeyNo ratings yet
- Gear Less Transmission System PDFDocument20 pagesGear Less Transmission System PDFAbhijeet MoreNo ratings yet
- Designing a Six-Speed GearboxDocument11 pagesDesigning a Six-Speed Gearboxadeasdfs83% (6)
- Power Transmission of A MachineDocument10 pagesPower Transmission of A MachineNaimul HasanNo ratings yet
- Design and Mathematical Modeling of Fluid Coupling for Efficient Transmission SystemsDocument6 pagesDesign and Mathematical Modeling of Fluid Coupling for Efficient Transmission SystemsChinmay JodderNo ratings yet
- AbstractDocument10 pagesAbstractMUSKAN PRNNo ratings yet
- Gearless Transmission Project ReportDocument32 pagesGearless Transmission Project ReportHarish Kumar73% (22)
- 906 PDFDocument14 pages906 PDFMahesh Daxini ThakkerNo ratings yet
- Flexible Shafts Enable Efficient Power Transmission Around ObstaclesDocument14 pagesFlexible Shafts Enable Efficient Power Transmission Around Obstaclesmohit tailorNo ratings yet
- CompleteInventory18 06 2018consumable PartsDocument10 pagesCompleteInventory18 06 2018consumable PartsHuda LestraNo ratings yet
- Eprocurement System For Organisations Under Mod: Bids ListDocument2 pagesEprocurement System For Organisations Under Mod: Bids ListHiranya BarmaNo ratings yet
- Oil Filter Cross Reference GuideDocument133 pagesOil Filter Cross Reference GuidePaulo ArrudaNo ratings yet
- Fluid Mechanics MCQ Questions & Answers - Chemical Engineering Page-8 Section-2Document1 pageFluid Mechanics MCQ Questions & Answers - Chemical Engineering Page-8 Section-2macky 2No ratings yet
- Nerf Ultimate Blaster Book PreviewDocument11 pagesNerf Ultimate Blaster Book PreviewJamal MorelliNo ratings yet
- Double Vane Type PumpDocument5 pagesDouble Vane Type PumpMiguel VlntìnNo ratings yet
- Internship Plan 2023Document2 pagesInternship Plan 2023xinyinNo ratings yet
- List Material ProyekDocument4 pagesList Material ProyekEgi Nuamsyah kosasihNo ratings yet
- Style Ss1: Normal Range .40"Document1 pageStyle Ss1: Normal Range .40"Imtiyaz KhanNo ratings yet
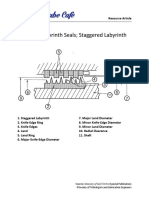
- Typical Labyrinth Seals Staggered Labyrinth: Resource ArticleDocument2 pagesTypical Labyrinth Seals Staggered Labyrinth: Resource ArticleKanchana WeerasingheNo ratings yet
- Electrical Conduit Supports 01Document1 pageElectrical Conduit Supports 01Manoj JaiswalNo ratings yet
- Layout Inspection Report: I.Performance Inspection ParametersDocument3 pagesLayout Inspection Report: I.Performance Inspection ParametersPearlsgodNo ratings yet
- Brian Kerr's Router LatheDocument7 pagesBrian Kerr's Router LatheErics100% (1)
- Method of Statement and JSA For Live Line Crosssing in PXIDocument8 pagesMethod of Statement and JSA For Live Line Crosssing in PXITwin BullsNo ratings yet
- Lufkin GearboxDocument163 pagesLufkin GearboxALEX100% (1)
- JK Cement EngDocument20 pagesJK Cement EngAlvaroNo ratings yet
- Ist KatalogDocument29 pagesIst Katalogmajmor-1No ratings yet
- Repair ManualDocument132 pagesRepair Manualicechieff96% (24)
- Pad-eye Design for 5 Mton Lifting LoadDocument2 pagesPad-eye Design for 5 Mton Lifting LoadPaulo MoreiraNo ratings yet
- Specification Chart For Conventional Duo-Cone Seal Groups (0599, 7561)Document8 pagesSpecification Chart For Conventional Duo-Cone Seal Groups (0599, 7561)Andrey GyrychNo ratings yet
- List Lifting RiggingDocument2 pagesList Lifting RiggingrezaNo ratings yet
- Chapter 4 - Stresses in BeamsDocument31 pagesChapter 4 - Stresses in BeamsJedidiah Joel AguirreNo ratings yet
- DST Tools Catalog PDF FreeDocument103 pagesDST Tools Catalog PDF FreeReza AsakerehNo ratings yet
- DHP482 Makita PDFDocument72 pagesDHP482 Makita PDFatorresh090675No ratings yet
- Instruction Sheet: Flexwell Waveguide Flaring and Connector AssemblyDocument2 pagesInstruction Sheet: Flexwell Waveguide Flaring and Connector AssemblysamiNo ratings yet
- Model PE-P4 (M199/M200) Parts CatalogDocument65 pagesModel PE-P4 (M199/M200) Parts CatalogOFBA srlNo ratings yet
- Electronic Parts Catalog - Option DetailDocument2 pagesElectronic Parts Catalog - Option DetailmunhNo ratings yet
- HILTI KB3 Vs KBTZ2Document1 pageHILTI KB3 Vs KBTZ2vivekNo ratings yet
- Yellow Pages - NP PDFDocument181 pagesYellow Pages - NP PDFkahwooi88No ratings yet
- All Movitel Sim Uses DetailsDocument11 pagesAll Movitel Sim Uses DetailsSravanPolepalliNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Recent Advances in Electrical Engineering: Applications OrientedFrom EverandRecent Advances in Electrical Engineering: Applications OrientedNo ratings yet