You might also like
- Position, Proximity and Motion Sensor: Prepared byDocument27 pagesPosition, Proximity and Motion Sensor: Prepared bySpidy PoudelNo ratings yet
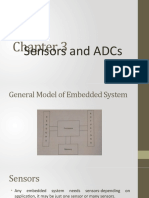
- Chapter 3Document85 pagesChapter 3Daksh BothraNo ratings yet
- ROBOTICS NOTESDocument5 pagesROBOTICS NOTESElthon JohnNo ratings yet
- 10) Wireless Distance Measurement For Satellites.Document8 pages10) Wireless Distance Measurement For Satellites.kk0511No ratings yet
- PLC Level 1Document46 pagesPLC Level 1Mohamed MamdouhNo ratings yet
- Radar System Using Arduino - Project ReportDocument23 pagesRadar System Using Arduino - Project ReportTarang SinghNo ratings yet
- UNIT_III_motion,_proximity,_ranging,_force,_magnetic_and_headingDocument84 pagesUNIT_III_motion,_proximity,_ranging,_force,_magnetic_and_headingAlemeNo ratings yet
- Robotics 6Document35 pagesRobotics 6nadiaNo ratings yet
- 40-character title for sensors and actuators chapterDocument46 pages40-character title for sensors and actuators chapterkeerthana murugeswaranNo ratings yet
- Sensors Used in Wind Power PlantsDocument27 pagesSensors Used in Wind Power PlantsDipesh BaviskarNo ratings yet
- Ultrasonic Motion DetectorDocument9 pagesUltrasonic Motion DetectorMarium AliNo ratings yet
- Sensor PDFDocument8 pagesSensor PDFConstanzaNo ratings yet
- Radar System Using Arduino UnoDocument23 pagesRadar System Using Arduino UnoAbhilash Chandran JNo ratings yet
- Module 2Document117 pagesModule 2Achsah K VijuNo ratings yet
- Smart Bin: Project GuideDocument19 pagesSmart Bin: Project GuideShashwat SharmaNo ratings yet
- Fault Detection in TM LineDocument25 pagesFault Detection in TM Linenaveen gNo ratings yet
- Lecture-2 Sensors and ActuatorsDocument39 pagesLecture-2 Sensors and ActuatorsDeepak TendolkarNo ratings yet
- Iot For Engineers Ece3501 Digital Assignment-1: L.Anirudh 18bec0559Document28 pagesIot For Engineers Ece3501 Digital Assignment-1: L.Anirudh 18bec0559anirudh lakshminarasimhanNo ratings yet
- Robotics Unit-5Document64 pagesRobotics Unit-5S19IT1215 HarshithaNo ratings yet
- Radar System Using Arduino UNO And Ultrasonic SensorDocument17 pagesRadar System Using Arduino UNO And Ultrasonic SensorSiddharthNo ratings yet
- Object Detection Using Ultrasonic Sensor RephrasedDocument12 pagesObject Detection Using Ultrasonic Sensor RephrasedkunalNo ratings yet
- TransdureDocument14 pagesTransdureRana Vivek SinghNo ratings yet
- PDD ProjectDocument30 pagesPDD ProjectIsrarul HaqueNo ratings yet
- 01 Sensors PDFDocument68 pages01 Sensors PDFNimsiri AbhayasingheNo ratings yet
- ASME IIT ROORKEE SECTION MODELS AND ROBOTICS SECTION SENSORSDocument31 pagesASME IIT ROORKEE SECTION MODELS AND ROBOTICS SECTION SENSORSDheeraj BudhirajaNo ratings yet
- MSD Module 2Document98 pagesMSD Module 2arvind valentinoNo ratings yet
- ECE211 Measure Lec 7Document33 pagesECE211 Measure Lec 7Alaa GaberNo ratings yet
- Arduino UnoDocument11 pagesArduino UnoNirav DsouzaNo ratings yet
- Automatic Street LightDocument17 pagesAutomatic Street LightRohit LamkhadeNo ratings yet
- Sensors and Data Acquisition: Radar GunDocument91 pagesSensors and Data Acquisition: Radar GunBurak Bildirici100% (1)
- Sensors and ActuatorsDocument109 pagesSensors and ActuatorsDr-Amit Kumar Singh100% (1)
- GRP ProjectDocument8 pagesGRP ProjectgunmeetsinghNo ratings yet
- (Ultrasonic Radar-Naman Kataria-CSB) PresentationDocument15 pages(Ultrasonic Radar-Naman Kataria-CSB) PresentationHimanshu VermaNo ratings yet
- Ultrasonic RADAR Project using Microcontroller and Stepper MotorDocument6 pagesUltrasonic RADAR Project using Microcontroller and Stepper Motorricky100% (3)
- Module 2Document61 pagesModule 2yashpalsingh80726No ratings yet
- Semester: V Class / Branch: TE ITDocument6 pagesSemester: V Class / Branch: TE ITKaustubh SawantNo ratings yet
- Unit-4 (1)Document45 pagesUnit-4 (1)apakkiNo ratings yet
- Vibration TransducerDocument7 pagesVibration TransducerPrakash Kumar100% (1)
- Sensors Information: - Sub:Esiot - Name:Chetana Bafna - ROLL NO:60 - Class:Te (Comp)Document42 pagesSensors Information: - Sub:Esiot - Name:Chetana Bafna - ROLL NO:60 - Class:Te (Comp)Khushbu BedmuthaNo ratings yet
- batch007PPT1 PDFDocument37 pagesbatch007PPT1 PDFKranthi KumarNo ratings yet
- Ultrasonic Based Distance Measurement SystemDocument18 pagesUltrasonic Based Distance Measurement SystemAman100% (2)
- Infrared RaysDocument7 pagesInfrared RaysShree RaiNo ratings yet
- Nilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsDocument15 pagesNilkanth Solutions Welcomes All of You in 15 Days Online Internship On Arduino and SensorsGohil HardikNo ratings yet
- Turbine Supervisory Instruments Monitor Critical ParametersDocument25 pagesTurbine Supervisory Instruments Monitor Critical ParametersMorassa Chona100% (1)
- MOdule 2 - GivenDocument58 pagesMOdule 2 - Givensreeni 1005No ratings yet
- S.No. TopicsDocument71 pagesS.No. TopicsKratika JainNo ratings yet
- Sensors and ActuatorsDocument12 pagesSensors and ActuatorsSavinda SenevirathneNo ratings yet
- Vehicle Anti-Collision Using Ultrasonic SignalsDocument22 pagesVehicle Anti-Collision Using Ultrasonic SignalsAakash GuptaNo ratings yet
- Design and Analysis of Automated Guided VehicleDocument11 pagesDesign and Analysis of Automated Guided Vehiclevyshnavipalutla56No ratings yet
- Radar System Using Ultrasonic SensorDocument14 pagesRadar System Using Ultrasonic SensorSiddharth maneNo ratings yet
- Design and Fabrication of An Autonomous FireDocument11 pagesDesign and Fabrication of An Autonomous FirePraveen KumarNo ratings yet
- Rolling Mill AutomationDocument23 pagesRolling Mill AutomationMohamed AlkharashyNo ratings yet
- Accident prevention in hilly areas using ultrasonic sensorsDocument27 pagesAccident prevention in hilly areas using ultrasonic sensorsVi LNo ratings yet
- Sensors UNIT III (Part 1) : CO3: Perform Simple Process Control ApplicationsDocument91 pagesSensors UNIT III (Part 1) : CO3: Perform Simple Process Control ApplicationsAzeem .kNo ratings yet
- IE 3371:automatic Control Systems: Chapter 2:sensors and TransducersDocument54 pagesIE 3371:automatic Control Systems: Chapter 2:sensors and Transducersفيصل aNo ratings yet
- Industrial Sensors PDFDocument11 pagesIndustrial Sensors PDFGrace MendiolaNo ratings yet
- EE-04306 Sensor Technology AssignmentDocument10 pagesEE-04306 Sensor Technology AssignmentCharsi 1080No ratings yet
- SensorsDocument27 pagesSensorslykarossele.nuestroNo ratings yet
- Gesture-based communication for paralyzed patientsDocument19 pagesGesture-based communication for paralyzed patientsDivya DewkatheNo ratings yet
- DR PDFDocument252 pagesDR PDFa_ouchar0% (1)
- Cisco Component Engineer Mixed SignalsDocument3 pagesCisco Component Engineer Mixed SignalsRahul MuralidharanNo ratings yet
- Eee-V-dcmachines and Synchronous Machines (10ee54) - SolutionDocument73 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - SolutionchaitanyaNo ratings yet
- History of Storage DevicesDocument42 pagesHistory of Storage DevicesZaira Lantican100% (2)
- Smith, LS - Neuromorphic Systems-Past, Present and FutureDocument16 pagesSmith, LS - Neuromorphic Systems-Past, Present and FutureAngel MartorellNo ratings yet
- 200807Document96 pages200807balaji_gawalwad9857No ratings yet
- PDX z9 Rrv3755Document107 pagesPDX z9 Rrv3755GustavoLopezGuardadoNo ratings yet
- LA1186Document5 pagesLA1186Michel MoacirNo ratings yet
- Lect5 Power DFGJH DJHD JDocument7 pagesLect5 Power DFGJH DJHD JRahul ShandilyaNo ratings yet
- Lazos de 4-20ma 2Document1 pageLazos de 4-20ma 2sanchez2328No ratings yet
- Plasma Vrs PermanganateDocument11 pagesPlasma Vrs PermanganatearinramNo ratings yet
- Chapter 3Document19 pagesChapter 3viaalcantsNo ratings yet
- WIL85EX Servis ManualDocument34 pagesWIL85EX Servis ManualMarija Todorović Ex BanNo ratings yet
- TIP142Document4 pagesTIP142Luis RamírezNo ratings yet
- Catalogue - Central Battery SystemDocument12 pagesCatalogue - Central Battery SystemarifzakirNo ratings yet
- Cathodic Disbondment Mul Tiple Channel Testing Unit MODEL #CD-16Document10 pagesCathodic Disbondment Mul Tiple Channel Testing Unit MODEL #CD-16Masood AlamNo ratings yet
- Class-D amplifier BOMDocument1 pageClass-D amplifier BOMCường MchwNo ratings yet
- Irfp460: N - Channel 500V - 0.22 - 20 A - To-247 Powermesh MosfetDocument8 pagesIrfp460: N - Channel 500V - 0.22 - 20 A - To-247 Powermesh MosfetBruno NascimentoNo ratings yet
- Electrical Fundamentals: Aircraft Maintenance LicenceDocument271 pagesElectrical Fundamentals: Aircraft Maintenance Licenceram rijhan yadavNo ratings yet
- EDC ManualDocument107 pagesEDC ManualmsurendiranNo ratings yet
- QSC gx3 SH Ts SCH PDFDocument1 pageQSC gx3 SH Ts SCH PDFAnibalNo ratings yet
- CMA 77 100 Clock Antenna A4 1Document3 pagesCMA 77 100 Clock Antenna A4 1Henrique MarquesNo ratings yet
- Delhi Public School Gwalior: Investigatory Project 2018-2019 PhysicsDocument22 pagesDelhi Public School Gwalior: Investigatory Project 2018-2019 PhysicsAryan TripathiNo ratings yet
- A 1 GHZ Cmos RF Front-End Ic For ADocument10 pagesA 1 GHZ Cmos RF Front-End Ic For ASP SpurtinathNo ratings yet
- Material Science 79 Important MCQ PDFDocument13 pagesMaterial Science 79 Important MCQ PDFNandakumar Reddy0% (1)
- FNCP-Improper Drainage SystemDocument9 pagesFNCP-Improper Drainage SystemJovie James Cabillan0% (1)
- Panasonic Tc-P55ut50 CH Gpf15duDocument96 pagesPanasonic Tc-P55ut50 CH Gpf15duHuanglong ZenNo ratings yet
- STR2A100 Series Application Note (Rev.0.3) : Sanken Electric Co., LTDDocument18 pagesSTR2A100 Series Application Note (Rev.0.3) : Sanken Electric Co., LTDАлександр АндриановNo ratings yet
- Safety Instructions: Warning CautionDocument141 pagesSafety Instructions: Warning CautionCarlos Rafael Chota ArévaloNo ratings yet
- Retriggerable Monostable Multivibrators Pulse Width Control GuideDocument8 pagesRetriggerable Monostable Multivibrators Pulse Width Control GuidePandarinath ParachiNo ratings yet