You might also like
- Mechatronics MCQDocument14 pagesMechatronics MCQNandakrishnan S L71% (7)
- Sensors & Transducers MCQDocument25 pagesSensors & Transducers MCQSaquibh Shaikh75% (4)
- EEN-021 Mechatronics Objective TYPE Q-ADocument2 pagesEEN-021 Mechatronics Objective TYPE Q-APiyush AgnihotriNo ratings yet
- Nts McqsDocument4 pagesNts McqsMudasarS78% (9)
- Sistem KontrolDocument20 pagesSistem KontrolJohann Sjbt100% (4)
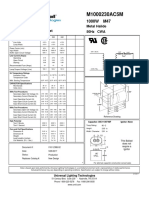
- M1000230AC5MDocument1 pageM1000230AC5MPlant Site KMI-KJANo ratings yet
- 01 Aero Thrust Pendulum IntroductionDocument40 pages01 Aero Thrust Pendulum IntroductionRooshNo ratings yet
- Thermal Equation of State and Critical PointDocument5 pagesThermal Equation of State and Critical PointJose GalvanNo ratings yet
- TRANE CCU MP40 Controller Points List For BACNET Jun09-E4Document7 pagesTRANE CCU MP40 Controller Points List For BACNET Jun09-E4Leila BenmohamedNo ratings yet
- Mechatronics MCQDocument35 pagesMechatronics MCQmech mech189% (19)
- JashuDocument204 pagesJashuPiyushsinhNo ratings yet
- Unit-5 MCQ’s on Sensors and TransducersDocument19 pagesUnit-5 MCQ’s on Sensors and TransducersasdhdahgadNo ratings yet
- MCQs and Measurement ConceptsDocument15 pagesMCQs and Measurement Conceptsdream breaker100% (1)
- Ujian Akhir Semester Sensor dan TransduserDocument5 pagesUjian Akhir Semester Sensor dan TransduserKhairiBudayawanNo ratings yet
- Sensors MCQs UNIT 1 To 5 For StudentsDocument29 pagesSensors MCQs UNIT 1 To 5 For StudentsMohit Singh100% (1)
- Emi MCQDocument27 pagesEmi MCQgautam100% (3)
- Objective Type Questions Instrumentation System & Devices (IDS)Document7 pagesObjective Type Questions Instrumentation System & Devices (IDS)mail2jaleel9952No ratings yet
- MechatronicsDocument14 pagesMechatronicsKaleab BeleteNo ratings yet
- ec2404-ESD Lab Course FileDocument30 pagesec2404-ESD Lab Course Filejayaseelanj89No ratings yet
- The Thermistor Whose Resistance Increase by Increasing TemperatureDocument6 pagesThe Thermistor Whose Resistance Increase by Increasing Temperaturesai shiva100% (1)
- 300+ TOP ELECTRONICS & INSTRUMENTATION Objective Questions and Answers PDFDocument10 pages300+ TOP ELECTRONICS & INSTRUMENTATION Objective Questions and Answers PDFC PazhanimuthuNo ratings yet
- Electrical InstrumentationDocument12 pagesElectrical Instrumentationबृजभूषणशर्माNo ratings yet
- Coc GirmayDocument3 pagesCoc Girmaytsegaymeseret2No ratings yet
- CH. 1 Transducer MCQDocument6 pagesCH. 1 Transducer MCQSBJEJNo ratings yet
- MicrocontrollersDocument1 pageMicrocontrollersprettyswagNo ratings yet
- Transducer MCQDocument18 pagesTransducer MCQgautam100% (1)
- MeasurementsDocument8 pagesMeasurementsSethu Naidu0% (1)
- Assignment 1 SoluDocument7 pagesAssignment 1 SoluAmirul AminNo ratings yet
- Question Bank: Dr. Navalar Nedunchezhiyan College of EngineeringDocument11 pagesQuestion Bank: Dr. Navalar Nedunchezhiyan College of EngineeringfaisalphyNo ratings yet
- Electronics Engineering Mastery Test 10: ECE Pre-Board ExamDocument29 pagesElectronics Engineering Mastery Test 10: ECE Pre-Board ExamXyNo ratings yet
- MCQ in Tests and Measurements Part 1 | ECE Board Exam QuestionsDocument18 pagesMCQ in Tests and Measurements Part 1 | ECE Board Exam QuestionsJirah GicangaoNo ratings yet
- InstrumentationDocument7 pagesInstrumentationRed David BallesterosNo ratings yet
- EC305 - Electronic Measurement and InstrumentationDocument8 pagesEC305 - Electronic Measurement and InstrumentationdwangdogNo ratings yet
- Mechatronics Question Bank For Mid-IIDocument10 pagesMechatronics Question Bank For Mid-IIUday Kiran BokkaNo ratings yet
- Question Yyybank For Unit I of MechatronicsDocument3 pagesQuestion Yyybank For Unit I of Mechatronicschetan patilNo ratings yet
- Two Marks Questions - Doc-MechatronicsDocument12 pagesTwo Marks Questions - Doc-MechatronicsNagammaieie88% (8)
- Electronics Engineering Mastery Test 7 ECE Pre-Board PDFDocument29 pagesElectronics Engineering Mastery Test 7 ECE Pre-Board PDFXyNo ratings yet
- Measurements Question Bank - Without AnswersDocument13 pagesMeasurements Question Bank - Without AnswersHossam Mohamed Ahmed ahmedNo ratings yet
- 7 Elex PreboardDocument8 pages7 Elex PreboardV1NSKYNo ratings yet
- TutorialDocument57 pagesTutorialAbimael wendimuNo ratings yet
- Measuring Electrical Components Using BridgesDocument7 pagesMeasuring Electrical Components Using BridgesSweetlineSonia100% (1)
- 2014 EE617 Midsem FINAL-with-Corr PDFDocument2 pages2014 EE617 Midsem FINAL-with-Corr PDFRohitSinghNo ratings yet
- Tugas Jawab TN-F 1-100 Hal 1225-1249Document25 pagesTugas Jawab TN-F 1-100 Hal 1225-1249Anonymous jyWpsYNo ratings yet
- Mengoperasikan sistem listrik, sistem elektronik dan sistem kontrolDocument18 pagesMengoperasikan sistem listrik, sistem elektronik dan sistem kontrolOde SNo ratings yet
- 1-Which of The Following Is Not Covered Under Mechanical Energy Domain?Document6 pages1-Which of The Following Is Not Covered Under Mechanical Energy Domain?pradnya sadigaleNo ratings yet
- Lic MCQDocument148 pagesLic MCQnithyasavi67% (9)
- ECE ReviewerDocument17 pagesECE ReviewerKristine AbanadorNo ratings yet
- EM&I - TerminalDocument5 pagesEM&I - TerminalZabeehullahmiakhailNo ratings yet
- PINOYBIX Tests and MeasurementsDocument20 pagesPINOYBIX Tests and MeasurementsRogelio Tacugue MahilumNo ratings yet
- Mechatronics Assignment: Basics of Sensors and ActuatorsDocument20 pagesMechatronics Assignment: Basics of Sensors and ActuatorsPrashant KumarNo ratings yet
- C. 500w C. One Amp - OhmDocument4 pagesC. 500w C. One Amp - Ohmfiraol100% (1)
- Sri Ramakrishna Institute of Technology, Coimbatore-10: Mechatronics QUIZ-3Document5 pagesSri Ramakrishna Institute of Technology, Coimbatore-10: Mechatronics QUIZ-3Veerakumar SNo ratings yet
- MCQ-CAT-1 EXAM UNIT-1 REVIEWDocument16 pagesMCQ-CAT-1 EXAM UNIT-1 REVIEWvijayalakshmiNo ratings yet
- NTS MEPCO TEST SOLUTIONSDocument12 pagesNTS MEPCO TEST SOLUTIONSMalik Muhammad UmarNo ratings yet
- Instrument Transformers and Transducers GuideDocument33 pagesInstrument Transformers and Transducers GuideTrojanNo ratings yet
- Pra Ukp 2Document8 pagesPra Ukp 2Fauzan FatihNo ratings yet
- The Resistance of LDR - When Exposed To Radiant EnergyDocument2 pagesThe Resistance of LDR - When Exposed To Radiant EnergyKrushnasamy SuramaniyanNo ratings yet
- IR-TI - Assignment 2 SolutionDocument3 pagesIR-TI - Assignment 2 SolutionMadhu AmithNo ratings yet
- Choosing the Correct SensorDocument11 pagesChoosing the Correct Sensorkarim mohamedNo ratings yet
- Design and Implementation of Portable Impedance AnalyzersFrom EverandDesign and Implementation of Portable Impedance AnalyzersNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Analog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignFrom EverandAnalog Circuit Design Volume 2: Immersion in the Black Art of Analog DesignNo ratings yet
- 21 Cip 37Document2 pages21 Cip 37Madhu AmithNo ratings yet
- IR-TI - Assignment 4 SolutionDocument4 pagesIR-TI - Assignment 4 SolutionMadhu AmithNo ratings yet
- Industrial Robotics - Theories For Implementation - Unit 3 - Week 0 With AnswersDocument4 pagesIndustrial Robotics - Theories For Implementation - Unit 3 - Week 0 With AnswersMadhu AmithNo ratings yet
- Industrial Robotics - Theories For Implementation - Unit 3 - Week 0 With AnswersDocument4 pagesIndustrial Robotics - Theories For Implementation - Unit 3 - Week 0 With AnswersMadhu AmithNo ratings yet
- TSC-TCR and STATCOMDocument24 pagesTSC-TCR and STATCOMAlisha Anjum100% (3)
- Calculate Numbers of Plate - Pipe - Strip Earthings (Part-3) - Electrical Notes & ArticlesDocument11 pagesCalculate Numbers of Plate - Pipe - Strip Earthings (Part-3) - Electrical Notes & ArticlesMohamad HishamNo ratings yet
- Wave Equation Problems and SolutionsDocument4 pagesWave Equation Problems and Solutionsmusic genieNo ratings yet
- How To Determine Correct Number of Earthing Electrodes Strips Plates and Pipes Part 1Document6 pagesHow To Determine Correct Number of Earthing Electrodes Strips Plates and Pipes Part 1Francisco MartinezNo ratings yet
- Fluent Multiphase 15.0 WSopt 01 Bubble ColumnDocument18 pagesFluent Multiphase 15.0 WSopt 01 Bubble ColumnVenkat GaneshNo ratings yet
- Magnetic Induction: Physics Electricity & Magnetism Electromagnetism & InductionDocument12 pagesMagnetic Induction: Physics Electricity & Magnetism Electromagnetism & InductionGerardo Alberto Navarro LopezNo ratings yet
- PI9000 Series Frequency Inverter Manual PDFDocument256 pagesPI9000 Series Frequency Inverter Manual PDFJose Larey BerdinNo ratings yet
- Revision of Chapter 10 - Electrical Maintenance Schedule of LHB Manual (Electrical)Document50 pagesRevision of Chapter 10 - Electrical Maintenance Schedule of LHB Manual (Electrical)Harsh Vardhan SinghNo ratings yet
- Review and Simulation of Flyback Topology For Module Level Parallel Inverters in PV Power SystemsDocument6 pagesReview and Simulation of Flyback Topology For Module Level Parallel Inverters in PV Power SystemsAMIT SHARMANo ratings yet
- Energies 12 04136Document14 pagesEnergies 12 04136Rania YaseenNo ratings yet
- HCM434EDocument8 pagesHCM434E3efooNo ratings yet
- Daconta - Boyle's & Charles' Law PPDocument10 pagesDaconta - Boyle's & Charles' Law PPLisa DacontaNo ratings yet
- Girvin Notes Superconducting Qubits and Circuits 2011Document132 pagesGirvin Notes Superconducting Qubits and Circuits 2011Aakash RabbiiNo ratings yet
- HVAC NewDocument25 pagesHVAC NewRaj BariaNo ratings yet
- Module and Activity 1 Fluid Mechanics ENSC 26A BSEE 201Document16 pagesModule and Activity 1 Fluid Mechanics ENSC 26A BSEE 201niel lunaNo ratings yet
- Homework 3 - CEE 511 - F19Document13 pagesHomework 3 - CEE 511 - F19John Shottkey100% (1)
- PHYS420 (Spring 2002) Riq Parra Homework # 2 Solutions ProblemsDocument6 pagesPHYS420 (Spring 2002) Riq Parra Homework # 2 Solutions ProblemsasknariñoNo ratings yet
- 11.water Level ControlDocument43 pages11.water Level Controlsandeep kumarNo ratings yet
- Lewin's Circuit Paradox: Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544Document10 pagesLewin's Circuit Paradox: Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544aiace00No ratings yet
- Objective Questions (MCQS) On Unit1 Kec 101T/201T: Diode Operation and ApplicationsDocument24 pagesObjective Questions (MCQS) On Unit1 Kec 101T/201T: Diode Operation and ApplicationsH.M. RaiNo ratings yet
- Finalreport SwetasinghDocument19 pagesFinalreport Swetasinghsaurav kumarNo ratings yet
- PSE100 Datenblatt - DC-DC Wandler Polyamp - 01.2017Document4 pagesPSE100 Datenblatt - DC-DC Wandler Polyamp - 01.2017paresh joshiNo ratings yet
- Problems - I Order SystemsDocument8 pagesProblems - I Order SystemskindenewNo ratings yet
- Optimize Your Water Supply System with Grundfos Horizontal PumpsDocument12 pagesOptimize Your Water Supply System with Grundfos Horizontal Pumpsnightmare_hong5818No ratings yet
- Condensate Recovery Pump: ModelDocument2 pagesCondensate Recovery Pump: ModelCTHNo ratings yet
- ANSI/NETA ATS-2009 electrical capacitor testing proceduresDocument2 pagesANSI/NETA ATS-2009 electrical capacitor testing proceduresfernandoquecaNo ratings yet