You might also like
- Image SegmentationDocument36 pagesImage Segmentationsdot1209No ratings yet
- Computer Vision - Bagus RullyDocument92 pagesComputer Vision - Bagus RullyWemar AdhieNo ratings yet
- 0.edge Detection - Sobel Algorithm (8 Files Merged)Document33 pages0.edge Detection - Sobel Algorithm (8 Files Merged)Mahesh N 22MVD0090No ratings yet
- VP07 1 CaliperGeometryDocument21 pagesVP07 1 CaliperGeometryinigofetNo ratings yet
- Two Types of Image Segmentation Exist:: Semantic Segmentation. Objects Shown in An Image Are Grouped Based OnDocument25 pagesTwo Types of Image Segmentation Exist:: Semantic Segmentation. Objects Shown in An Image Are Grouped Based OnShivada JayaramNo ratings yet
- Dip 4Document40 pagesDip 4DEVID ROYNo ratings yet
- Image Matching Using SIFT (Scale Infariant Feature Transform) and SURF (Speed Up Robust Feature)Document16 pagesImage Matching Using SIFT (Scale Infariant Feature Transform) and SURF (Speed Up Robust Feature)Balqis DeraNo ratings yet
- Chapter One: Introduction To Interactive Computer GraphicsDocument10 pagesChapter One: Introduction To Interactive Computer Graphicsኃይለ ማርያም አዲሱNo ratings yet
- PortfolioDocument21 pagesPortfolioapi-733180654No ratings yet
- Feature ExtractionDocument23 pagesFeature Extractionabdul jawadNo ratings yet
- 11.image Processing in AgricultureDocument37 pages11.image Processing in AgricultureragjniNo ratings yet
- Image Segmentation: Ross Whitaker SCI Institute, School of Computing University of UtahDocument49 pagesImage Segmentation: Ross Whitaker SCI Institute, School of Computing University of UtahchrislucasNo ratings yet
- Pentachart Example 1Document1 pagePentachart Example 1johnnymakarroniNo ratings yet
- Elements of Visual InterpretationDocument4 pagesElements of Visual InterpretationJane AsasiraNo ratings yet
- Digital Image ProcessingDocument88 pagesDigital Image ProcessinghorlandovragasNo ratings yet
- CS231. Nhập môn Thị giác máy tính: Image segmentationDocument60 pagesCS231. Nhập môn Thị giác máy tính: Image segmentationKim Anh NguyễnNo ratings yet
- Computer Vision and Image Processing - Fundamentals and ApplicationsDocument27 pagesComputer Vision and Image Processing - Fundamentals and ApplicationsDikshant BuwaNo ratings yet
- Digital Image ProcessingDocument59 pagesDigital Image ProcessingSibgha IsrarNo ratings yet
- Digital Image FusionDocument20 pagesDigital Image FusionRahul SreedharNo ratings yet
- Harris InterestPoints Andfeatures 1Document64 pagesHarris InterestPoints Andfeatures 1Ankush JainNo ratings yet
- ME4707 Robótica: Herramientas de Visión Computacional IIDocument48 pagesME4707 Robótica: Herramientas de Visión Computacional IICarolina Garcia GuerreroNo ratings yet
- Unit8ImageSegmentationpdf 2022 11 14 13 41 12Document67 pagesUnit8ImageSegmentationpdf 2022 11 14 13 41 12SUSAN KHADKANo ratings yet
- Feature Detection and MatchingDocument50 pagesFeature Detection and Matchingarya dadhich100% (1)
- A Fused Decision Based Image Classification Based On Texture FeaturesDocument7 pagesA Fused Decision Based Image Classification Based On Texture FeaturesDavid Solomon Raju YellampalliNo ratings yet
- Computer Vision: Chapter 5. SegmentationDocument16 pagesComputer Vision: Chapter 5. SegmentationThịi ÁnhhNo ratings yet
- Bag of FeatureDocument75 pagesBag of FeatureBudi PurnomoNo ratings yet
- Chapter5 - Motion Detection, Segmentation and WaveletsDocument30 pagesChapter5 - Motion Detection, Segmentation and WaveletsAshwin Josiah SamuelNo ratings yet
- 18 Feature Detectors PDFDocument15 pages18 Feature Detectors PDFPrashanth OnlyfunNo ratings yet
- 03 FeaturesDocument84 pages03 FeaturesAnonimo Um WNo ratings yet
- Matching Features Matching With Invariant Features: Computational Photography, 6.882 Prof. Bill FreemanDocument19 pagesMatching Features Matching With Invariant Features: Computational Photography, 6.882 Prof. Bill FreemanAS햇살No ratings yet
- Multimedia Systems: Multimedia Databases - Image Processing BasicsDocument58 pagesMultimedia Systems: Multimedia Databases - Image Processing BasicsOliver KiburiNo ratings yet
- Distinctive Image Feature From Scale-Invariant Keypoints: David G. Lowe, 2004Document27 pagesDistinctive Image Feature From Scale-Invariant Keypoints: David G. Lowe, 2004Wei LiuNo ratings yet
- Computer Vision and Image Computer Vision and Image Processing (CSEL Processing (CSEL - 393) 393) 4Document27 pagesComputer Vision and Image Computer Vision and Image Processing (CSEL Processing (CSEL - 393) 393) 4ali sheikhNo ratings yet
- Image Feature Extraction and SegmentationDocument36 pagesImage Feature Extraction and SegmentationMonark MehtaNo ratings yet
- Topology For Data Science: Morse Theory and Application: Colleen M. FarrellyDocument16 pagesTopology For Data Science: Morse Theory and Application: Colleen M. Farrellykadarsh226521No ratings yet
- Computer Vision ch5Document55 pagesComputer Vision ch5ssNo ratings yet
- Lecture 9 Image Enhancement - 1st - 2nd OrderDocument55 pagesLecture 9 Image Enhancement - 1st - 2nd OrderCh wahab GujjarNo ratings yet
- Machine Visi N: Lecture # 8: Basics of DIP ContDocument17 pagesMachine Visi N: Lecture # 8: Basics of DIP ContSohaib SajidNo ratings yet
- Image SegmentationDocument103 pagesImage Segmentationchaman.singh.ug20No ratings yet
- 3D Articular Human Tracking From Monocular Video: From Condensation To Kinematic JumpsDocument5 pages3D Articular Human Tracking From Monocular Video: From Condensation To Kinematic Jumpspankaj301188No ratings yet
- Computer Vision: Edge DetectionDocument23 pagesComputer Vision: Edge DetectionThịi ÁnhhNo ratings yet
- Lecture 1Document15 pagesLecture 1kamaleshwaran3117No ratings yet
- FeaturesDocument36 pagesFeaturesLê Thị Hoàng YếnNo ratings yet
- Unit 3 (Slides) PDFDocument233 pagesUnit 3 (Slides) PDFKeerthana g.krishnanNo ratings yet
- MIPImage Segmentation CDocument17 pagesMIPImage Segmentation CyadakakyNo ratings yet
- INF4300 2011 f02 TextureDocument15 pagesINF4300 2011 f02 TexturepriyapgandhiNo ratings yet
- IP.03-Image Enhancement-b.Spatial FiltersDocument95 pagesIP.03-Image Enhancement-b.Spatial FiltersDũng Trần TiếnNo ratings yet
- Town - ComputerVision - L5Document13 pagesTown - ComputerVision - L5Iniyan Thiruselvam Navaladi KarthikeyanNo ratings yet
- Object Recognition From Local Scale-Invariant FeaturesDocument8 pagesObject Recognition From Local Scale-Invariant FeaturesAnung 'Hidayat Panuntun'No ratings yet
- Implementation of Image Enhancement and Image Segmentation TechniquesDocument8 pagesImplementation of Image Enhancement and Image Segmentation TechniquespNo ratings yet
- Image Segmentation, Representation & DescriptionDocument42 pagesImage Segmentation, Representation & DescriptionEshan JainNo ratings yet
- Machine Vision CamerasDocument27 pagesMachine Vision CamerasParth Desai100% (1)
- EE 604 Image ProcessingDocument15 pagesEE 604 Image Processingmuskan agarwalNo ratings yet
- Lecture 1Document80 pagesLecture 1Reema AmgadNo ratings yet
- DIP 3rd UnitDocument16 pagesDIP 3rd UnitVaishnavi BavalekarNo ratings yet
- Digital Image Processing Chapter 8 Image Analysis and Pattern RecognitionDocument36 pagesDigital Image Processing Chapter 8 Image Analysis and Pattern RecognitionShaikh Sumit NoorNo ratings yet
- Digital Photogrammetry-98Document50 pagesDigital Photogrammetry-98BELAY TAFACHUNo ratings yet
- A Survey Based On Region Based Segmentation: S.Karthick Dr.K.SathiyasekarDocument5 pagesA Survey Based On Region Based Segmentation: S.Karthick Dr.K.SathiyasekarJunaid KhanNo ratings yet
- 9 Vision Lec 6Document58 pages9 Vision Lec 6Kareem SamirNo ratings yet
- Day 3 - Single Image OrientationDocument22 pagesDay 3 - Single Image OrientationAarthi shreeNo ratings yet
- Gene-Definition, Concept of Gene-Classical and Modern ConceptsDocument4 pagesGene-Definition, Concept of Gene-Classical and Modern ConceptsAarthi shreeNo ratings yet
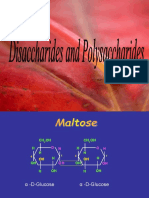
- Disaccharides and PolysaccharidesDocument17 pagesDisaccharides and PolysaccharidesAarthi shreeNo ratings yet
- Properties of Mono SacchardiesDocument16 pagesProperties of Mono SacchardiesAarthi shreeNo ratings yet
- Structure of MonosacchardiesDocument7 pagesStructure of MonosacchardiesAarthi shreeNo ratings yet
- M. AARTHI SHREE 2020012001: Answer KeyDocument3 pagesM. AARTHI SHREE 2020012001: Answer KeyAarthi shreeNo ratings yet
- Overview of Central Dogma of LifeDocument4 pagesOverview of Central Dogma of LifeAarthi shreeNo ratings yet
- LOGIC - Immediate InferenceDocument32 pagesLOGIC - Immediate InferencePearl DomingoNo ratings yet
- Game Theory and Business Strategy: Individual Assignment 2Document2 pagesGame Theory and Business Strategy: Individual Assignment 2PKNo ratings yet
- GAT SamplesDocument30 pagesGAT SamplesMohamed Zayed100% (1)
- Speed Controller of Servo Trainer Part 2Document8 pagesSpeed Controller of Servo Trainer Part 2jameswattNo ratings yet
- Freshman ReflectionDocument5 pagesFreshman Reflectionapi-385758014No ratings yet
- Vibration Analysis LevelDocument230 pagesVibration Analysis LevelAhmed shawkyNo ratings yet
- MCQ in Computer Fundamentals Part 1 ECE Board ExamDocument18 pagesMCQ in Computer Fundamentals Part 1 ECE Board ExamLuelson CordovaNo ratings yet
- Stratego AlgorithmsDocument74 pagesStratego AlgorithmsbobertstokesNo ratings yet
- 2 Bit Full AdderDocument21 pages2 Bit Full AdderSilvestre VásquezNo ratings yet
- Operations Research Mid-TermDocument16 pagesOperations Research Mid-TermMohammad Zaid AkramNo ratings yet
- Process ControlDocument57 pagesProcess Controlneerajtrip123No ratings yet
- Solution - Real Analysis - Folland - Ch1Document14 pagesSolution - Real Analysis - Folland - Ch1胡爻垚No ratings yet
- Expense QuotasDocument3 pagesExpense QuotasabhiNo ratings yet
- Mathematics 8 Summative Test IIIDocument2 pagesMathematics 8 Summative Test IIIJunly Jeff NegapatanNo ratings yet
- First Page PDFDocument1 pageFirst Page PDFVenkata DeekshitNo ratings yet
- Fluid Mechanics Fundamentals and Applications, Cengel, Mcgraw Hill, Chapter 10Document4 pagesFluid Mechanics Fundamentals and Applications, Cengel, Mcgraw Hill, Chapter 10jcaza20No ratings yet
- Lecture 3 Bilinear TFDocument32 pagesLecture 3 Bilinear TFNathan KingoriNo ratings yet
- CSEC MayJune2013 01234020.SPEC PDFDocument36 pagesCSEC MayJune2013 01234020.SPEC PDFCarl Agape Davis0% (1)
- 300+ TOP Neural Networks Multiple Choice Questions and AnswersDocument29 pages300+ TOP Neural Networks Multiple Choice Questions and AnswersJAVARIA NAZIRNo ratings yet
- Time Series ForecastingDocument11 pagesTime Series ForecastingAshish GuptaNo ratings yet
- NotesDocument193 pagesNotesLemi TuroNo ratings yet
- Skip Lists: A Probabilistic Alternative To Balanced TreesDocument9 pagesSkip Lists: A Probabilistic Alternative To Balanced TreeshendersonNo ratings yet
- PHY103A: Lecture # 7: Semester II, 2015-16 Department of Physics, IIT KanpurDocument13 pagesPHY103A: Lecture # 7: Semester II, 2015-16 Department of Physics, IIT KanpurShreyaNo ratings yet
- Work, Energy, Power: Chapter 7 in A NutshellDocument31 pagesWork, Energy, Power: Chapter 7 in A NutshellArun Kumar AruchamyNo ratings yet
- List - Assignment 1.1Document2 pagesList - Assignment 1.1Pham Nguyen Thien Chuong K16 DNNo ratings yet
- Problems Analysis and EOS 2011-1Document2 pagesProblems Analysis and EOS 2011-1Jenny CórdobaNo ratings yet
- Simplex Algorithm - WikipediaDocument20 pagesSimplex Algorithm - WikipediaGalata BaneNo ratings yet
- C4 Vectors - Vector Lines PDFDocument33 pagesC4 Vectors - Vector Lines PDFMohsin NaveedNo ratings yet
- BCECE 2016 First Stage Question PaperDocument28 pagesBCECE 2016 First Stage Question PaperdesotyaNo ratings yet
- Air Bearing CalculationDocument47 pagesAir Bearing CalculationtomekzawistowskiNo ratings yet