You might also like
- Robot Operating System (ROS): The Complete Reference (Volume 6)From EverandRobot Operating System (ROS): The Complete Reference (Volume 6)No ratings yet
- Professional Microsoft Robotics Developer StudioFrom EverandProfessional Microsoft Robotics Developer StudioRating: 5 out of 5 stars5/5 (1)
- Mahmoud Adel: ObjectiveDocument3 pagesMahmoud Adel: ObjectiveAhmed EmadNo ratings yet
- Resume PublicDocument1 pageResume Public22mbmb35No ratings yet
- Generic Resume TemplateDocument1 pageGeneric Resume Templatekalevaibhav436No ratings yet
- Google ResumeDocument1 pageGoogle ResumeBhargava RamNo ratings yet
- Amit Kumar Nandi: EngineerDocument2 pagesAmit Kumar Nandi: EngineerAmit NandiNo ratings yet
- AmarjeetDocument4 pagesAmarjeetAmarjeet kumarNo ratings yet
- Chakshu Sharma: Senior Test EngineerDocument5 pagesChakshu Sharma: Senior Test EngineerRakesh JhalaniNo ratings yet
- Amarjeet - CepheidDocument4 pagesAmarjeet - CepheidAmarjeet kumarNo ratings yet
- Sumit Kamble: Embedded Software EngineerDocument3 pagesSumit Kamble: Embedded Software EngineersanchitaNo ratings yet
- Embedded Engineer Resume SampleDocument2 pagesEmbedded Engineer Resume SamplesuhailNo ratings yet
- Shrinivas A Bhusannavar: ObjectiveDocument1 pageShrinivas A Bhusannavar: ObjectiveSHRINIVAS BHUSANNAVARNo ratings yet
- (Navigators) : Addverb AdvantageDocument1 page(Navigators) : Addverb AdvantagesatyaNo ratings yet
- RRRRRDocument3 pagesRRRRRk maheshNo ratings yet
- MD YASIN ARAFAT MS Fall 2020Document2 pagesMD YASIN ARAFAT MS Fall 2020YasinNo ratings yet
- ESD - DAY 1-PortalDocument35 pagesESD - DAY 1-PortaldraqulaincNo ratings yet
- Jake Nickel Fall 2021 Resume Ver 6Document1 pageJake Nickel Fall 2021 Resume Ver 6api-566032323No ratings yet
- Parnika Gupta CVDocument2 pagesParnika Gupta CVArush SinghNo ratings yet
- Meghdeep Jana Resume RDocument1 pageMeghdeep Jana Resume Rapi-485731344No ratings yet
- Design and Analysis of Gantry Robot For Pick and Place Mechanism WithDocument8 pagesDesign and Analysis of Gantry Robot For Pick and Place Mechanism WithHaider AliNo ratings yet
- Sarfraz Anwar: Electrical EngineerDocument2 pagesSarfraz Anwar: Electrical EngineerSarfrazAnwarNo ratings yet
- Wapnil Hanadrakant OndeDocument3 pagesWapnil Hanadrakant OndeRashmi TalrejaNo ratings yet
- Pipelined HighSpeed Low Power Neural NetworkDocument7 pagesPipelined HighSpeed Low Power Neural NetworkShopnil SarkarNo ratings yet
- Pawan Kumar TiwariDocument3 pagesPawan Kumar TiwariPAWAN KUMAR TIWARINo ratings yet
- Hamza Qureshi DS CVDocument1 pageHamza Qureshi DS CVUpdateGeneNo ratings yet
- Harshit Satya: Work Experience SkillsDocument1 pageHarshit Satya: Work Experience SkillsharshitNo ratings yet
- RobotperfDocument9 pagesRobotperfANUSHREE SABNISNo ratings yet
- DVishwanath ResumeaDocument5 pagesDVishwanath ResumeaRamya MestaNo ratings yet
- VishalYadav (0 0)Document1 pageVishalYadav (0 0)Ronnit ShuklaNo ratings yet
- Abha ResumeDocument1 pageAbha Resumegs2019016No ratings yet
- Sign Language TranslationDocument4 pagesSign Language TranslationNaila AshrafNo ratings yet
- Matlab AUTOSAR GuideDocument20 pagesMatlab AUTOSAR GuideAdrian MendozaNo ratings yet
- (QR Code Paper1)Document6 pages(QR Code Paper1)Muhammed MinhajNo ratings yet
- Naukri SudhindraHungund (15y 0m)Document2 pagesNaukri SudhindraHungund (15y 0m)RaahmiNo ratings yet
- Halcon Brochure enDocument20 pagesHalcon Brochure entvngzrcxtrNo ratings yet
- Mask R CNN Based Vehicle Detection Model For Traffic Management SystemDocument5 pagesMask R CNN Based Vehicle Detection Model For Traffic Management SystemVedant AgrawalNo ratings yet
- Resume RickyhugetDocument1 pageResume Rickyhugetapi-720960601No ratings yet
- Abdul Ghaffar - Resume-NewDocument5 pagesAbdul Ghaffar - Resume-NewVikky YaNo ratings yet
- Sourav KumarDocument1 pageSourav Kumarprakash gangwarNo ratings yet
- Amarjeet Kumar CV NewDocument3 pagesAmarjeet Kumar CV NewAmarjeet kumarNo ratings yet
- A Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlDocument15 pagesA Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlramykhalilNo ratings yet
- Vision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDocument5 pagesVision-Based Guidance and Navigation For Autonomous MAV in Indoor EnvironmentDRathikaNo ratings yet
- AbhishekBaheti Resume AutomationDocument1 pageAbhishekBaheti Resume Automationbhushanrpatil11No ratings yet
- Ashish SharmaDocument2 pagesAshish SharmaAyushi JaiswalNo ratings yet
- Embedded and Automotive - IoT - VLSI - Java - Data Science and Analytics CoursesDocument4 pagesEmbedded and Automotive - IoT - VLSI - Java - Data Science and Analytics CoursesCranes Varsity100% (1)
- Automated Driving With Matlab and SimulinkDocument51 pagesAutomated Driving With Matlab and Simulinkramesh gondilNo ratings yet
- Chet An ResumeDocument2 pagesChet An ResumeE3CoreTechNo ratings yet
- A Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlDocument15 pagesA Novel Deep Learning Based ANPR Pipeline For Vehicle Access ControlAbhishek Parochi Engineer thisNo ratings yet
- HimmatresumeDocument2 pagesHimmatresumeHimanshu JangidNo ratings yet
- Sameer Pande: B.Tech in Computer Science & Engineering, Iit DelhiDocument3 pagesSameer Pande: B.Tech in Computer Science & Engineering, Iit DelhiYashwant KumarNo ratings yet
- Shubham Meshram Resume-6Document1 pageShubham Meshram Resume-6Shubham MeshramNo ratings yet
- Automated Driver Drowsiness Detection SystemDocument31 pagesAutomated Driver Drowsiness Detection SystemNaren Karthikeyan RNo ratings yet
- De Automotive ElectronicsDocument12 pagesDe Automotive ElectronicsnitinlivingNo ratings yet
- Samay Gupta SynopsisDocument9 pagesSamay Gupta Synopsissamay guptaNo ratings yet
- Bikash Jha: Professional SummaryDocument2 pagesBikash Jha: Professional Summarybikash jhaNo ratings yet
- Automated Vehicle Security System Using ALPR and Face DetectionDocument9 pagesAutomated Vehicle Security System Using ALPR and Face Detectionakinlabi aderibigbeNo ratings yet
- An Experimental Performance Analysis On Robotics Process Automation (RPA) With Open Source OCR Engines: Microsoft Ocr and Google Tesseract OCRDocument10 pagesAn Experimental Performance Analysis On Robotics Process Automation (RPA) With Open Source OCR Engines: Microsoft Ocr and Google Tesseract OCRuipathlearning8No ratings yet
- Resume 2024Document2 pagesResume 2024janhavi khindkarNo ratings yet
- Babeesh Resume PDFDocument3 pagesBabeesh Resume PDFEldhose VargheseNo ratings yet
- 10.1007@s11042 019 08293 7Document16 pages10.1007@s11042 019 08293 7vaseem akramNo ratings yet
- Sample SigconfDocument11 pagesSample Sigconfvaseem akramNo ratings yet
- NMPC PDFDocument15 pagesNMPC PDFvaseem akramNo ratings yet
- Circumventing Dynamic Modeling Evaluation of The Error-State PDFDocument8 pagesCircumventing Dynamic Modeling Evaluation of The Error-State PDFvaseem akramNo ratings yet
- Robotics and HumanityDocument19 pagesRobotics and HumanityEloisa Joy Moredo100% (1)
- Fractal Approach in RoboticsDocument20 pagesFractal Approach in RoboticsSmileyNo ratings yet
- Feb-Mar 2000 DCDDocument63 pagesFeb-Mar 2000 DCDBig ZamNo ratings yet
- BIT Paper QuestionDocument4 pagesBIT Paper QuestionVuyyuri GaneshNo ratings yet
- Unit 1 - IntroductionDocument33 pagesUnit 1 - IntroductionRavi KantNo ratings yet
- IRB14050 Single-Arm YuMi-versCDocument9 pagesIRB14050 Single-Arm YuMi-versCJosé Manuel MoaNo ratings yet
- Pneumobot: Sprue Picker RobotDocument37 pagesPneumobot: Sprue Picker RobotAlfandel VillamartinNo ratings yet
- Assignment - 2024 - Week - 1 - With SolutionDocument5 pagesAssignment - 2024 - Week - 1 - With Solutionfactsvideo2005No ratings yet
- Fanuc System 6M PDFDocument639 pagesFanuc System 6M PDFStefka PetrovaNo ratings yet
- Brief History of RoboticsDocument4 pagesBrief History of RoboticsGlenn Devaras ManaogNo ratings yet
- Glass Cleaning Robot: Guide-Dr. Swet Chandan Presented by (Group-22)Document29 pagesGlass Cleaning Robot: Guide-Dr. Swet Chandan Presented by (Group-22)MRITYUNJOY GUPTANo ratings yet
- Ev3 Program Description Solar Energy EnusDocument2 pagesEv3 Program Description Solar Energy EnusFederico VasquezNo ratings yet
- There Will Come Soft RainsDocument8 pagesThere Will Come Soft RainsEng ProfNo ratings yet
- Course Plan - ME 639Document2 pagesCourse Plan - ME 639Satya SuryaNo ratings yet
- 06 Triton AI ECE191 Drone Autonomous TakeOff Landing and Mapping Project ProposalDocument3 pages06 Triton AI ECE191 Drone Autonomous TakeOff Landing and Mapping Project ProposalTeam InspirationNo ratings yet
- Domestic Robots: Defense Institute of Advanced Technology, Pune (Deemed University) Department of Mechanical EngineeringDocument17 pagesDomestic Robots: Defense Institute of Advanced Technology, Pune (Deemed University) Department of Mechanical Engineeringajaygill5785No ratings yet
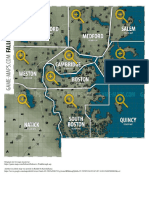
- Fallout RPG - Map - Boston AreaDocument33 pagesFallout RPG - Map - Boston Areabigkev73No ratings yet
- Robotics ThingDocument7 pagesRobotics Thingshani.No ratings yet
- Seminar On Emerging Technologies - ANIMATRONICSDocument13 pagesSeminar On Emerging Technologies - ANIMATRONICSHenry FineboneNo ratings yet
- Mike Resnick - BalanceDocument3 pagesMike Resnick - BalanceGiovanni Di FrancescoNo ratings yet
- ME 652 Mobile Robotics: Handout #1: Course IntroductionDocument32 pagesME 652 Mobile Robotics: Handout #1: Course IntroductionSumit MishraNo ratings yet
- Mint Plus ManualDocument40 pagesMint Plus ManualRu RickjamesNo ratings yet
- Box RobotDocument105 pagesBox RobotGustavo GutoNo ratings yet
- Introduction To RoboticsDocument60 pagesIntroduction To RoboticsJOEL STEPHEN 19BEE0262No ratings yet
- MOTOPAC-W Series: Arc Welding Robot PackageDocument10 pagesMOTOPAC-W Series: Arc Welding Robot PackageSandro LourençoNo ratings yet
- 4 Mobility 1Document10 pages4 Mobility 1praiselovesscienceNo ratings yet
- Prepare A Report On Autonomous Robot: Government Polytechnic, Nanded Micro Project Academic Year: 2021-22Document23 pagesPrepare A Report On Autonomous Robot: Government Polytechnic, Nanded Micro Project Academic Year: 2021-22Akash MarkhaleNo ratings yet
- JYRC ReportDocument3 pagesJYRC Reportsalma saleemNo ratings yet
- Stock Hasil ProduksiDocument183 pagesStock Hasil ProduksiPutra MahendraNo ratings yet
- BA KR AGILUS Sixx CR enDocument239 pagesBA KR AGILUS Sixx CR enCogianu PetruNo ratings yet