You might also like
- Joint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkFrom EverandJoint RES and Distribution Network Expansion Planning Under a Demand Response FrameworkNo ratings yet
- Energies 15 00990 v2Document25 pagesEnergies 15 00990 v2Akhil NairNo ratings yet
- Zalzar Et Al-2017-International Transactions On Electrical Energy SystemsDocument12 pagesZalzar Et Al-2017-International Transactions On Electrical Energy SystemsbableshNo ratings yet
- Combined Operations of Renewable Energy Systems and Responsive Demand in A Smart GridDocument9 pagesCombined Operations of Renewable Energy Systems and Responsive Demand in A Smart GridcanelengresNo ratings yet
- 1 s2.0 S0142061521009108 MainDocument14 pages1 s2.0 S0142061521009108 Mainkumar_ranjit6555No ratings yet
- Frequency Control Large BESSDocument4 pagesFrequency Control Large BESSClaysius DewanataNo ratings yet
- Unified System-Level Modeling of Intermittent Renewable Energy Sources and Energy Storage For Power System OperationDocument12 pagesUnified System-Level Modeling of Intermittent Renewable Energy Sources and Energy Storage For Power System Operationawais saeedNo ratings yet
- PhotovolticDocument10 pagesPhotovolticViraj DissanayakeNo ratings yet
- Yeh 2012Document8 pagesYeh 2012Luis PerdomoNo ratings yet
- Multi objective LFC using hybrid BFO and PSO optimized PI controllerDocument14 pagesMulti objective LFC using hybrid BFO and PSO optimized PI controllergtchsekharNo ratings yet
- Control Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniDocument16 pagesControl Engineering Practice: Youssef Krim, Dhaker Abbes, Saber Krim, Mohamed Faouzi MimouniRiad TifaNo ratings yet
- Energy Management Systems Aggregators A Literature SurveyDocument13 pagesEnergy Management Systems Aggregators A Literature SurveyHugo Andres RodriguezNo ratings yet
- (Leido) The Role of Frequency Regulation Remuneration Schemes in An Energy Matrix With High Penetration of Renewable EnergyDocument18 pages(Leido) The Role of Frequency Regulation Remuneration Schemes in An Energy Matrix With High Penetration of Renewable EnergyChristian Figueroa ValenciaNo ratings yet
- Optimal Relocating of Compensators For Real-Reactive Power Management in Distributed SystemsDocument13 pagesOptimal Relocating of Compensators For Real-Reactive Power Management in Distributed SystemsjaganNo ratings yet
- Electrical Power and Energy Systems: SciencedirectDocument8 pagesElectrical Power and Energy Systems: SciencedirectAyad M Al-AwsiNo ratings yet
- 10.1016@j.epsr.2020.106763Document9 pages10.1016@j.epsr.2020.106763Simo MilenkovićNo ratings yet
- 1 s2.0 S1568494622000898 MainDocument17 pages1 s2.0 S1568494622000898 MainAlhassanNo ratings yet
- Power Quality Improvement of Distribution Network Using BESS and Capacitor BankDocument9 pagesPower Quality Improvement of Distribution Network Using BESS and Capacitor BankIKNo ratings yet
- New Ancillary Service Market For ERCOTDocument11 pagesNew Ancillary Service Market For ERCOTLianNo ratings yet
- Optimal DeloadingDocument17 pagesOptimal DeloadingAbdullah Al Noman SiumNo ratings yet
- 339 Lombardi PowertechDocument7 pages339 Lombardi PowertechMarco OrtizNo ratings yet
- The Beneficial Role of SMES Coil in DC Lines As An Energy Buffer For Integrating Large Scale Wind PowerDocument4 pagesThe Beneficial Role of SMES Coil in DC Lines As An Energy Buffer For Integrating Large Scale Wind PowerFernando Torres LealNo ratings yet
- Impacts of Plug-In Vehicles and Distributed Storage On Electric Power Delivery NetworksDocument9 pagesImpacts of Plug-In Vehicles and Distributed Storage On Electric Power Delivery NetworkssdfsdfNo ratings yet
- Demand Side EMS Using Artificial Neural Network-Based LP MethodDocument9 pagesDemand Side EMS Using Artificial Neural Network-Based LP MethodZaher F. RahamNo ratings yet
- Challenges Integrating Distributed Energy Storage Smart GridDocument6 pagesChallenges Integrating Distributed Energy Storage Smart GridAlif Imran MohamedNo ratings yet
- s00202 023 01924 1Document23 pagess00202 023 01924 1Mahdi HERMASSINo ratings yet
- EI Fact Sheet: Storage Technologies For The Power System: DriversDocument4 pagesEI Fact Sheet: Storage Technologies For The Power System: DriversThorsten StruweNo ratings yet
- Enhanced Frequency Regulation Using MultilevelDocument8 pagesEnhanced Frequency Regulation Using Multileveloctober87No ratings yet
- Impact of EVDocument6 pagesImpact of EVBùi ViệtNo ratings yet
- Real-Time Genetic Algorithm Optimization of Reactive PowerDocument10 pagesReal-Time Genetic Algorithm Optimization of Reactive Powerelias vasquezNo ratings yet
- Reactive Power Optimization of A Distribution Network With High-Penetration of Wind and Solar Renewable Energy and Electric VehiclesDocument13 pagesReactive Power Optimization of A Distribution Network With High-Penetration of Wind and Solar Renewable Energy and Electric VehiclesbhaveshNo ratings yet
- Multi-Scenario and Multi-Objective Collaborative Optimization of Distribution Network Considering Electric Vehicles and Mobile Energy Storage SystemsDocument8 pagesMulti-Scenario and Multi-Objective Collaborative Optimization of Distribution Network Considering Electric Vehicles and Mobile Energy Storage SystemsMohammed sabeelNo ratings yet
- Analysis of Fast Frequency Response Allocations in Power Systems With High System Non-Synchronous PenetrationsDocument15 pagesAnalysis of Fast Frequency Response Allocations in Power Systems With High System Non-Synchronous Penetrations16 Malola KrishnanNo ratings yet
- Applsci 11 07851 v2Document26 pagesApplsci 11 07851 v2Fathan MujibNo ratings yet
- Power System Frequencycontrol Using Battery Energy Storage SystemsDocument22 pagesPower System Frequencycontrol Using Battery Energy Storage SystemsJudith GalvezNo ratings yet
- Analysis of Control Strategies Based On Virtual Inertia For The Improvement of Frequency Stability in An Islanded Grid With Wind Generators and Battery Energy Storage SystemsDocument19 pagesAnalysis of Control Strategies Based On Virtual Inertia For The Improvement of Frequency Stability in An Islanded Grid With Wind Generators and Battery Energy Storage Systemsipazmino2353No ratings yet
- Review On Load Frequency Control Techniques in Distributed Generation Power SystemsDocument19 pagesReview On Load Frequency Control Techniques in Distributed Generation Power SystemsAkansha SnehaNo ratings yet
- Sustainable Energy, Grids and Networks: Matteo Troncia, José Pablo Chaves Ávila, Fabrizio Pilo, Tomás Gómez San RománDocument13 pagesSustainable Energy, Grids and Networks: Matteo Troncia, José Pablo Chaves Ávila, Fabrizio Pilo, Tomás Gómez San RománamirNo ratings yet
- EVs Charging Power Control for Frequency Stabilization in MicrogridsDocument15 pagesEVs Charging Power Control for Frequency Stabilization in MicrogridsissarachaiNo ratings yet
- Load Frequency Control in Power SystemsDocument16 pagesLoad Frequency Control in Power SystemsPavan uttej RavvaNo ratings yet
- Comparison of Economical and Technical Photovoltaic Hosting Capacity Limits in Distribution NetworksDocument23 pagesComparison of Economical and Technical Photovoltaic Hosting Capacity Limits in Distribution NetworksAsadNo ratings yet
- Under Frequency Protection Enhancement of An Islanded Active Distribution Network Using A Virtual Inertia-Controlled-Battery Energy Storage SystemDocument39 pagesUnder Frequency Protection Enhancement of An Islanded Active Distribution Network Using A Virtual Inertia-Controlled-Battery Energy Storage Systempavan mariserlaNo ratings yet
- Grid-Connected Photovoltaic Systems With Energy Storage For Ancillary ServicesDocument34 pagesGrid-Connected Photovoltaic Systems With Energy Storage For Ancillary ServicesLuccas TadeuNo ratings yet
- A Real-Life Application of An Efficient Energy Management Method For A Local Energy System in Presence of Energy Storage SystemsDocument6 pagesA Real-Life Application of An Efficient Energy Management Method For A Local Energy System in Presence of Energy Storage SystemsSoNgita CreSthaNo ratings yet
- Modeling Study On Flexible Load's Demand ResponseDocument13 pagesModeling Study On Flexible Load's Demand ResponseAsgharNo ratings yet
- Electrical Power and Energy Systems: G. Shankar, V. MukherjeeDocument14 pagesElectrical Power and Energy Systems: G. Shankar, V. MukherjeeHamsa DeepikaNo ratings yet
- rpg2 12088Document12 pagesrpg2 12088Akhilesh Kumar MishraNo ratings yet
- biomimetics-09-00066Document24 pagesbiomimetics-09-00066khannoussi kamiliaNo ratings yet
- LVRT Neural NetworkDocument15 pagesLVRT Neural NetworkEZHILARASI GNo ratings yet
- Palma Behnke2013Document11 pagesPalma Behnke2013Itamar Peñaloza MoránNo ratings yet
- Computers and Electrical Engineering: Fatima Abu Salah, Ahmad Harb, Mohamad K. KhawajaDocument15 pagesComputers and Electrical Engineering: Fatima Abu Salah, Ahmad Harb, Mohamad K. KhawajaOussama El BouadiNo ratings yet
- FulltextDocument9 pagesFulltextzahidNo ratings yet
- Comparison of Flywheels and Supercapacitors For Energy Saving in Elevators Konstantinos Kafalis Athanasios D. KarlisDocument8 pagesComparison of Flywheels and Supercapacitors For Energy Saving in Elevators Konstantinos Kafalis Athanasios D. Karlismtp22pengNo ratings yet
- Energies 17 01485Document30 pagesEnergies 17 01485Maher AzzouzNo ratings yet
- Intelligent Topology-Oriented Load Shedding SchemeDocument10 pagesIntelligent Topology-Oriented Load Shedding SchemeBeu DeCondes BelchiorNo ratings yet
- Electric Energy Management in Residential Areas Through Coordination of Multiple Smart HomesDocument16 pagesElectric Energy Management in Residential Areas Through Coordination of Multiple Smart HomesalirezaNo ratings yet
- Generic Inertia Emulation Controller For Multiterminal VSC High Voltage Direct CurrentDocument9 pagesGeneric Inertia Emulation Controller For Multiterminal VSC High Voltage Direct CurrentPedro SCNo ratings yet
- Renewable Energy: Issam Salhi, Saïd Doubabi, Najib Essounbouli, Abdelaziz HamzaouiDocument9 pagesRenewable Energy: Issam Salhi, Saïd Doubabi, Najib Essounbouli, Abdelaziz HamzaouiSantiago GNo ratings yet
- Desarrollo SustentableDocument18 pagesDesarrollo Sustentablejuan manuelNo ratings yet
- International Journal of Multidisciplinary Research and Growth EvaluationDocument8 pagesInternational Journal of Multidisciplinary Research and Growth EvaluationJames UjamNo ratings yet
- Manual de Taller CF150 PDFDocument190 pagesManual de Taller CF150 PDFMotorcycles Workshop Amigos PulsarNo ratings yet
- Capacitors and TypesDocument11 pagesCapacitors and TypesHa FaiazNo ratings yet
- 2023 BMW 128tiDocument8 pages2023 BMW 128tikctukishi9No ratings yet
- Aug 2022 Spotlight Merged Lyst4330Document147 pagesAug 2022 Spotlight Merged Lyst4330Nitika VermaNo ratings yet
- PX4212 3Document2 pagesPX4212 3kalpanaNo ratings yet
- ST MicroInverter SchemeticDocument12 pagesST MicroInverter Schemeticpuspendu janaNo ratings yet
- Spare Parts ListDocument89 pagesSpare Parts ListQalb MorhafNo ratings yet
- Arch 001 Architectural Design 01 Introduction of Design Ar, Ryan BakingDocument12 pagesArch 001 Architectural Design 01 Introduction of Design Ar, Ryan BakingZendrick EspartinezNo ratings yet
- Power Boost BulletinDocument3 pagesPower Boost BulletinBrianHazeNo ratings yet
- WALA Case StudyDocument6 pagesWALA Case StudyPandji AhmadNo ratings yet
- Crane Grab ManualDocument42 pagesCrane Grab ManualAurvin Singh100% (2)
- Overview of Uninteruptive Power Systems (UPS) : Course ContentDocument34 pagesOverview of Uninteruptive Power Systems (UPS) : Course ContentSaber AbdelaalNo ratings yet
- SemiconductorDocument69 pagesSemiconductorSatheshNo ratings yet
- Wal Mart Case Group 10Document2 pagesWal Mart Case Group 10Prajapati BhavikMahendrabhaiNo ratings yet
- Defining FlashoverDocument10 pagesDefining Flashoverslamet_rNo ratings yet
- CF CF: Instruction ManualDocument16 pagesCF CF: Instruction ManualMiguel HerreraNo ratings yet
- FT - JURNAL - An Update of Second Law Analysis and Optimization of A Single-Flash - BAYU RUDIYANTODocument10 pagesFT - JURNAL - An Update of Second Law Analysis and Optimization of A Single-Flash - BAYU RUDIYANTOWahyu Dwi TarunaNo ratings yet
- Indian Ocean Rising Maritime Security and Policy Challenges (PDFDrive)Document136 pagesIndian Ocean Rising Maritime Security and Policy Challenges (PDFDrive)Kebede MichaelNo ratings yet
- Brochure Truong Thinh - enDocument18 pagesBrochure Truong Thinh - envinhquangbk10No ratings yet
- Volvo 940 1993 Wiring Diagrams MFI DI Systems ComponentsDocument31 pagesVolvo 940 1993 Wiring Diagrams MFI DI Systems Componentskubuntu704No ratings yet
- 11 KV SwitchgearDocument13 pages11 KV SwitchgearSandip AhireNo ratings yet
- Model Lp3: Installation and Service Instructions For Streamline™ Lp3 Strobe LightsDocument20 pagesModel Lp3: Installation and Service Instructions For Streamline™ Lp3 Strobe LightsRogers Hermann Olivares CuevaNo ratings yet
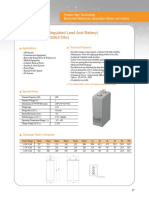
- (Valve Regulated Lead Acid Battery) ESG 200 (2V, 200AH/10hr)Document1 page(Valve Regulated Lead Acid Battery) ESG 200 (2V, 200AH/10hr)RosiinNo ratings yet
- Towards Carbon Neutral Airport Operations Through The Use of Renewable Energy Sources: The Case of Chhatrapati Shivaji Maharaj and Indira Gandhi International Airports, IndiaDocument17 pagesTowards Carbon Neutral Airport Operations Through The Use of Renewable Energy Sources: The Case of Chhatrapati Shivaji Maharaj and Indira Gandhi International Airports, IndiaMamta AgarwalNo ratings yet
- CH 3 - Problems 2023-12-27 22 - 14 - 56Document2 pagesCH 3 - Problems 2023-12-27 22 - 14 - 56rb8q9sz8hrNo ratings yet
- Wärtsilä Jovytec Pms 2002K / 3002K: Operating ManualDocument32 pagesWärtsilä Jovytec Pms 2002K / 3002K: Operating ManualIlham WaskitoNo ratings yet
- Sci 8 Q1 W3 FinalDocument4 pagesSci 8 Q1 W3 FinalShiela Belandres MendozaNo ratings yet
- Standard Specification For Automotive Spark-Ignition Engine Fuel PDFDocument29 pagesStandard Specification For Automotive Spark-Ignition Engine Fuel PDFMohamed KARASADNo ratings yet
- Cow ChecklistDocument4 pagesCow ChecklistGarvit MalhotraNo ratings yet
- Express Limited Warranty: FORM 6315 First EditionDocument2 pagesExpress Limited Warranty: FORM 6315 First EditionLei LiNo ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)