You might also like
- De-Thi HTDKN HK2 1617Document1 pageDe-Thi HTDKN HK2 1617Phùng Tiến ĐạtNo ratings yet
- Đề cương LTĐKTĐDocument17 pagesĐề cương LTĐKTĐNguyễn Duy TháiNo ratings yet
- Lý Thuyết LTĐKTĐDocument19 pagesLý Thuyết LTĐKTĐducNo ratings yet
- Thiết kế bộ điều khiển phản hồi trạng thái có bộ quan sát Luenberger cho hệ thống vòng bi từ chủ động rotor cứng 4 bậc tự doDocument6 pagesThiết kế bộ điều khiển phản hồi trạng thái có bộ quan sát Luenberger cho hệ thống vòng bi từ chủ động rotor cứng 4 bậc tự dopvdaiNo ratings yet
- Điều khiển thích nghi phản hồi đầu ra theo nguyên lý tách sử dụng quan sát trạng thái thời gian hữu hạn cho hệ phi tuyến có đồng thời tham số bất định và nhiễu đầu vàoDocument7 pagesĐiều khiển thích nghi phản hồi đầu ra theo nguyên lý tách sử dụng quan sát trạng thái thời gian hữu hạn cho hệ phi tuyến có đồng thời tham số bất định và nhiễu đầu vàopvdaiNo ratings yet
- Đêf Cương CSĐKDocument32 pagesĐêf Cương CSĐKDươngNo ratings yet
- Đề 3 Thi Ket Thuc Học Phần KT Cảm Biến (Da Ki)Document1 pageĐề 3 Thi Ket Thuc Học Phần KT Cảm Biến (Da Ki)Linh Nguyen Tien100% (1)
- Báo cáo bài tập lớn DTSDocument27 pagesBáo cáo bài tập lớn DTSMinh Hữu100% (1)
- btl vật lý 2Document4 pagesbtl vật lý 2tailun76No ratings yet
- Cách xác định bộ thông số DenavitDocument3 pagesCách xác định bộ thông số DenavitThảo Phùng Thị ThanhNo ratings yet
- Nhóm 4 - Cảm biến độ ẩm đất - FINISHDocument27 pagesNhóm 4 - Cảm biến độ ẩm đất - FINISHNguyên Nguyễn100% (1)
- Asm - Giai Đo N 1 (Ac18102)Document24 pagesAsm - Giai Đo N 1 (Ac18102)Béo TiếnNo ratings yet
- Chapter 4 - Anten MảngDocument23 pagesChapter 4 - Anten MảngTrung VũNo ratings yet
- Bai Tap Dai So Tuyen Tinh Nang CaoDocument5 pagesBai Tap Dai So Tuyen Tinh Nang CaothiNo ratings yet
- Bài 3Document4 pagesBài 3Nguyễn Thị Tài LinhNo ratings yet
- ĐỀ CƯƠNG TỔNG HỢP KỸ THUẬT ĐIỀU KHIỂN TỰ ĐỘNGDocument86 pagesĐỀ CƯƠNG TỔNG HỢP KỸ THUẬT ĐIỀU KHIỂN TỰ ĐỘNGPHÚC HỒ ĐẮCNo ratings yet
- Phuong Phap May Phat Tuong Duong.3716Document5 pagesPhuong Phap May Phat Tuong Duong.3716vawnhuwngNo ratings yet
- Báo Cáo Điều Khiển Quá Trình - Đại học Bách khoa Hà NộiDocument12 pagesBáo Cáo Điều Khiển Quá Trình - Đại học Bách khoa Hà Nộikudo potterNo ratings yet
- Bao Cao Thi Nghiem CSTD - Bai 1Document23 pagesBao Cao Thi Nghiem CSTD - Bai 1Giang Nguyen100% (1)
- Bài thí nghiệm số 2Document3 pagesBài thí nghiệm số 2Nguyễn Thành NguyênNo ratings yet
- Câu Hỏi Ôn Thi Trắc Nghiệm Vật Liệu HọcDocument2 pagesCâu Hỏi Ôn Thi Trắc Nghiệm Vật Liệu Họcvu4sutu2No ratings yet
- Tieu Luan Ve Anten GuongDocument18 pagesTieu Luan Ve Anten GuongBánh Mỳ Khô100% (1)
- Chương 1-Bài Giảng+Câu Hỏi Và Bài TậpDocument19 pagesChương 1-Bài Giảng+Câu Hỏi Và Bài Tậpkiên lêNo ratings yet
- Nghiên Cứu Phương Pháp Chỉnh Định Bộ Điều Khiển PID Cho Các Hệ Thống Có Trễ Vận Tải (Dựa Trên Lý Thuyết Hermite-Biehler)Document94 pagesNghiên Cứu Phương Pháp Chỉnh Định Bộ Điều Khiển PID Cho Các Hệ Thống Có Trễ Vận Tải (Dựa Trên Lý Thuyết Hermite-Biehler)Man EbookNo ratings yet
- Báo Cáo Thực Hành Mô Hình Hóa Và Mô Phỏng Buổi 1Document18 pagesBáo Cáo Thực Hành Mô Hình Hóa Và Mô Phỏng Buổi 1Lê TuấnNo ratings yet
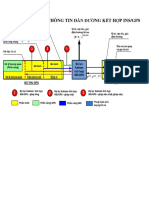
- Hệ Thống Xử Lý Thông Tin Dẫn Đường Kết Hợp InsDocument13 pagesHệ Thống Xử Lý Thông Tin Dẫn Đường Kết Hợp Insyenninh86No ratings yet
- Phu Luc EFO 1101 PDFDocument4 pagesPhu Luc EFO 1101 PDFAnonymous fdW3zKcYdiNo ratings yet
- Hamming Code MatlabDocument3 pagesHamming Code MatlabDũng Đoàn AnhNo ratings yet
- Chuong 5 So Do Khoi Radar TRac 200 Va Star 2000Document10 pagesChuong 5 So Do Khoi Radar TRac 200 Va Star 2000Lê Trung NamNo ratings yet
- Chuong 3Document37 pagesChuong 3UTEer ForNo ratings yet
- System Identification ToolboxDocument22 pagesSystem Identification Toolboxvananhbarca100% (1)
- -Lab1 - Nguyễn Văn TrungDocument10 pages-Lab1 - Nguyễn Văn TrungNguyễn Văn Trung PH 3 0 0 0 90% (1)
- IMUDocument85 pagesIMUnguyenhuu43100% (3)
- 2 L01 TNKTS ONLINE Day 2Document13 pages2 L01 TNKTS ONLINE Day 2Viện NguyễnNo ratings yet
- MẠCH ĐIỀU KHIỂN THIẾT BỊ BẰNG SÓNG RFDocument23 pagesMẠCH ĐIỀU KHIỂN THIẾT BỊ BẰNG SÓNG RFNam Bùi67% (3)
- BTL VI Xu LyDocument30 pagesBTL VI Xu LyledangtuanbkNo ratings yet
- DCCT HethongBMS NguonduphongBMSY445645Document12 pagesDCCT HethongBMS NguonduphongBMSY445645Đức ToànNo ratings yet
- Đồ án thiết kế hệ thống phân loại sản phẩmDocument42 pagesĐồ án thiết kế hệ thống phân loại sản phẩmLê Hải ĐăngNo ratings yet
- DKLGPLC - 1 - Co So Cho Dieu Khien LogicDocument12 pagesDKLGPLC - 1 - Co So Cho Dieu Khien Logicdung nguyenNo ratings yet
- Mophong HTTTDocument97 pagesMophong HTTTNguyên Thanh LâmNo ratings yet
- LT Anten Va Truyen Song - Bai 8Document67 pagesLT Anten Va Truyen Song - Bai 8Tùng QuáchNo ratings yet
- Bai Tap Truyen Dong Dien 8706Document10 pagesBai Tap Truyen Dong Dien 8706Tấn HùngNo ratings yet
- Hệ thống định vị toàn cầu GPSDocument24 pagesHệ thống định vị toàn cầu GPSvietdniit0% (1)
- TNMĐT B2Document30 pagesTNMĐT B2Khoa ĐăngNo ratings yet
- Bộ biến đổi PFC kiểu BoostDocument24 pagesBộ biến đổi PFC kiểu BoostThọ VũNo ratings yet
- QUY TRÌNH VẬN HÀNH ỨNG CỨU VÀ BẢO DƯỠNG TRẠM BTSDocument20 pagesQUY TRÌNH VẬN HÀNH ỨNG CỨU VÀ BẢO DƯỠNG TRẠM BTSHaiTrinh100% (1)
- Tinh Toan Thiet Ke Thiet Bi Dien Tu Cong Suat Tran Van Thinh p2 8737Document125 pagesTinh Toan Thiet Ke Thiet Bi Dien Tu Cong Suat Tran Van Thinh p2 8737Thành CôngNo ratings yet
- ôn triếtDocument2 pagesôn triếtabc12No ratings yet
- Võ Văn Đăng Khoa - 2011435 - lớp L04 Bài Chuẩn Bị - Thí Nghiệm 4 Điều Khiển Nhiệt Độ Dùng Bộ Điều Khiển Thích Nghi Pid Auto-TuningDocument6 pagesVõ Văn Đăng Khoa - 2011435 - lớp L04 Bài Chuẩn Bị - Thí Nghiệm 4 Điều Khiển Nhiệt Độ Dùng Bộ Điều Khiển Thích Nghi Pid Auto-Tuningkhoa võ văn đăngNo ratings yet
- Xu-Ly-Tin-Hieu-So - Trinh-Van-Loan - Xu-Ly-Tin-Hieu-So - (Cuuduongthancong - Com) PDFDocument155 pagesXu-Ly-Tin-Hieu-So - Trinh-Van-Loan - Xu-Ly-Tin-Hieu-So - (Cuuduongthancong - Com) PDFDũng ĐặngNo ratings yet
- BaocaoxlsthDocument55 pagesBaocaoxlsthQuốc DoanhNo ratings yet
- Hệ Thống Cơ Điện Tử 1Document13 pagesHệ Thống Cơ Điện Tử 1liên vănNo ratings yet
- Câu Hỏi Ôn Tập Mạch Điện 2Document3 pagesCâu Hỏi Ôn Tập Mạch Điện 2Lê Minh HiếuNo ratings yet
- ĐỀ CƯƠNG ÔN TẬP MÔN KTĐTDocument1 pageĐỀ CƯƠNG ÔN TẬP MÔN KTĐTMeme NhạtNo ratings yet
- Brief 40577 44375 1022014162736LeTrongnghiaDocument10 pagesBrief 40577 44375 1022014162736LeTrongnghiaKhiêm NguyễnNo ratings yet
- Đề cương thiết bị điệnDocument35 pagesĐề cương thiết bị điện20020569No ratings yet
- Thiết Kế Bộ Điều Khiển Đại Số Gia Tử Và Tối Ưu Bằng Giải Thuật Di Truyền Cho Robot Chuỗi Bám Quỹ ĐạoDocument12 pagesThiết Kế Bộ Điều Khiển Đại Số Gia Tử Và Tối Ưu Bằng Giải Thuật Di Truyền Cho Robot Chuỗi Bám Quỹ ĐạoHoàng ViệtNo ratings yet
- ĐỀ CƯƠNG ÔN TẬP MÔN CẢM BIẾN VÀ HỆ THỐNG ĐO 1Document12 pagesĐỀ CƯƠNG ÔN TẬP MÔN CẢM BIẾN VÀ HỆ THỐNG ĐO 1hiệu lêNo ratings yet
- Cau Hoi On Tap 20162Document15 pagesCau Hoi On Tap 20162Mạnh Tuấn100% (2)