You might also like
- Control Theories Commonly Used Today Are Classical Control TheoryDocument12 pagesControl Theories Commonly Used Today Are Classical Control TheoryJuliánNo ratings yet
- Controlling an Inverted Pendulum Using FeedbackDocument17 pagesControlling an Inverted Pendulum Using FeedbackAnonymous KhhapQJVYtNo ratings yet
- Alvarez Johndave Bsece412 Ass#1Document4 pagesAlvarez Johndave Bsece412 Ass#1MelanieNo ratings yet
- Control Theory - WikipediaDocument15 pagesControl Theory - WikipediaDAVID MURILLONo ratings yet
- Control Systems OverviewDocument19 pagesControl Systems OverviewTaku Teekay MatangiraNo ratings yet
- Introduction to Control Systems EngineeringDocument3 pagesIntroduction to Control Systems EngineeringrajeshmholmukheNo ratings yet
- 1 Mechatronics - Control - DevicesDocument40 pages1 Mechatronics - Control - DevicesAdrian GCNo ratings yet
- Control Theory ExplainedDocument12 pagesControl Theory ExplainedyalllikNo ratings yet
- Control Systems - NotesDocument61 pagesControl Systems - NotesNarasimha Murthy YayavaramNo ratings yet
- Automatic Control: Open Loop Control Systems: A System in Which The Output Has No Effect On The Control Action IsDocument11 pagesAutomatic Control: Open Loop Control Systems: A System in Which The Output Has No Effect On The Control Action IsmjoNo ratings yet
- Candor Cecille-Lindsay Bsece412 Ass#11Document5 pagesCandor Cecille-Lindsay Bsece412 Ass#11MelanieNo ratings yet
- 10Document22 pages10Amneet sistersNo ratings yet
- Essay / Assignment Title: System Engineering With A Focus On Business ProcessesDocument32 pagesEssay / Assignment Title: System Engineering With A Focus On Business ProcessesAmneet sistersNo ratings yet
- Control TheoryDocument10 pagesControl TheoryAnonymous E4Rbo2sNo ratings yet
- Introduction To Control SystemsDocument3 pagesIntroduction To Control SystemsRahul SandilyaNo ratings yet
- controlICS CH1Document5 pagescontrolICS CH1Magarsaa Qana'iiNo ratings yet
- Control System18EE61Document111 pagesControl System18EE61Jose Alex MathewNo ratings yet
- Control TheoryDocument12 pagesControl TheorymCmAlNo ratings yet
- Fundamentals of Automatic Control SystemsDocument11 pagesFundamentals of Automatic Control SystemsLouie CamposNo ratings yet
- Control Systems Modeling FundamentalsDocument24 pagesControl Systems Modeling FundamentalsSiva Bala KrishnanNo ratings yet
- Lecture 1 Control SystemsDocument21 pagesLecture 1 Control SystemsMahrukh Mumtaz Hussain100% (1)
- Control Systems Notes DEE M2 JuneDocument34 pagesControl Systems Notes DEE M2 JuneThairu MuiruriNo ratings yet
- Control SystemsDocument12 pagesControl Systemsoyebowale.emmanuelNo ratings yet
- Control System NotesDocument2 pagesControl System NotesAkshata PachhapurkarNo ratings yet
- Nonlinear Control of Underactuated SystemsDocument307 pagesNonlinear Control of Underactuated SystemsszepesvaNo ratings yet
- Industrial Control Chapter 1Document19 pagesIndustrial Control Chapter 1Qayyum AqasyahNo ratings yet
- 3 - Open and Closed Loop SystemDocument15 pages3 - Open and Closed Loop SystemKenzie WalipiNo ratings yet
- EE2253 NotesDocument124 pagesEE2253 NotesSiva Kathikeyan100% (1)
- Term PaperDocument9 pagesTerm PaperJake YaoNo ratings yet
- What is a Control System - Definition, Features & ApplicationsDocument2 pagesWhat is a Control System - Definition, Features & ApplicationsAdil MahmudNo ratings yet
- Control System PPKDocument6 pagesControl System PPKP Praveen KumarNo ratings yet
- BM1301 - Introduction to Bio-Control SystemsDocument87 pagesBM1301 - Introduction to Bio-Control SystemsRajeevSangamNo ratings yet
- EEE401 Control System Design OverviewDocument170 pagesEEE401 Control System Design OverviewShazidNo ratings yet
- Closed Loop Control System ExplainedDocument6 pagesClosed Loop Control System ExplainedMUHAMMAD AKRAMNo ratings yet
- Control System - WikipediaDocument8 pagesControl System - WikipediafwefNo ratings yet
- Free Study Materials & Career Guidance for Engineers, Doctors & MoreDocument124 pagesFree Study Materials & Career Guidance for Engineers, Doctors & MoreaduveyNo ratings yet
- Control Theory - Wikipedia, The Free EncyclopediaDocument14 pagesControl Theory - Wikipedia, The Free EncyclopediaJoon Suk HuhNo ratings yet
- Subject - Mechatronics: Summer - 2018 SolutionDocument31 pagesSubject - Mechatronics: Summer - 2018 SolutionFaheem TirmiziNo ratings yet
- Unit IDocument7 pagesUnit IanandhNo ratings yet
- Introduction To Automatic ControlDocument10 pagesIntroduction To Automatic ControlFatih YıldızNo ratings yet
- Definition and Types of Control SystemsDocument6 pagesDefinition and Types of Control SystemsAdonis NicolasNo ratings yet
- EE2253 Control Systems NotesDocument124 pagesEE2253 Control Systems NotesrameshsmeNo ratings yet
- Control System EngineeringDocument95 pagesControl System EngineeringAbdulrahmanNo ratings yet
- Autonomous Power SystemDocument14 pagesAutonomous Power SystemgagagagNo ratings yet
- Introduction To Control Systems: Theme 1Document16 pagesIntroduction To Control Systems: Theme 1Murphy's LawNo ratings yet
- Lesson #M1 - 1 Introduction To Control SystemsDocument172 pagesLesson #M1 - 1 Introduction To Control SystemsShazidNo ratings yet
- Control SystemDocument3 pagesControl SystemsryunkNo ratings yet
- ME55 CONTROL ENGINEERINGDocument7 pagesME55 CONTROL ENGINEERINGManasa Sathyanarayana SNo ratings yet
- Introduction To Control Systems: June 2022Document13 pagesIntroduction To Control Systems: June 2022omar ManNo ratings yet
- From - Control System Design - by Karl Johan Åström, 2002Document38 pagesFrom - Control System Design - by Karl Johan Åström, 2002VigneshRamakrishnanNo ratings yet
- Feedback Control ProblemDocument77 pagesFeedback Control ProblemcayniNo ratings yet
- Control SystemDocument183 pagesControl Systemsantoshgowda8No ratings yet
- Comparative Analysis of MIT Rule and Lyapunov Rule in Model Reference Adaptive Control SchemeDocument11 pagesComparative Analysis of MIT Rule and Lyapunov Rule in Model Reference Adaptive Control SchemeiisteNo ratings yet
- Control EngineeringDocument2 pagesControl Engineeringamovahedian8285No ratings yet
- Ambo university MENG 5272 chapter on linear systemsDocument20 pagesAmbo university MENG 5272 chapter on linear systemsFikadu EshetuNo ratings yet
- College of Engineering Education Matina, Davao CityDocument8 pagesCollege of Engineering Education Matina, Davao CityGrazel MDNo ratings yet
- 1 - Introduction To Control SystemsDocument11 pages1 - Introduction To Control SystemsKenzie WalipiNo ratings yet
- Laboratory Manual 2021-2022: Digital Signal Processing LaboratoryDocument77 pagesLaboratory Manual 2021-2022: Digital Signal Processing LaboratorySanket AmbadagattiNo ratings yet
- Analytical and Numerical Methods For Volterra EquationsDocument242 pagesAnalytical and Numerical Methods For Volterra EquationsНадежда БурмистроваNo ratings yet
- Assignment 2Document7 pagesAssignment 2ue06037No ratings yet
- Chapter 2Document20 pagesChapter 2Fahad AbdullahNo ratings yet
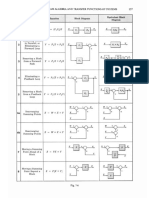
- CHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsDocument6 pagesCHAP. 71 Block Diagram Algebra and Transfer Functions of SystemsIan UdhiliNo ratings yet
- Wiberg-StateSpaceLinearSystems Text PDFDocument246 pagesWiberg-StateSpaceLinearSystems Text PDFVishnu SreeKumar100% (2)
- 1.1. Discrete-Time Signals and Systems. Basic DefinitionsDocument11 pages1.1. Discrete-Time Signals and Systems. Basic DefinitionsNirmal Kumar PandeyNo ratings yet
- Network Analysis and Synthesis - Franklin F. KuoDocument531 pagesNetwork Analysis and Synthesis - Franklin F. KuoMarco VrajaNo ratings yet
- Signal ProcessingDocument275 pagesSignal ProcessingBruno Martins100% (1)
- Linear System Theory and DesignDocument351 pagesLinear System Theory and DesignMaria Alvarez100% (1)
- DSP 2018 Lecture 1Document75 pagesDSP 2018 Lecture 1Alphonse BiziyaremyeNo ratings yet
- Discrete Signals and SystemsDocument58 pagesDiscrete Signals and Systemsgebretsadkan abrhaNo ratings yet
- Pengolahan Sinyal Digital: Adhi Harmoko SaputroDocument60 pagesPengolahan Sinyal Digital: Adhi Harmoko SaputroKevin AkmalansyahNo ratings yet
- Linear Systems: Prof Sung-Ho HurDocument30 pagesLinear Systems: Prof Sung-Ho HurYousef BilbeisiNo ratings yet
- Fixed Point Signal Processing by W PaddgetDocument133 pagesFixed Point Signal Processing by W Paddgettest mail100% (1)
- CS Lect.2 Modeling in The Frequency DomainDocument60 pagesCS Lect.2 Modeling in The Frequency DomainHassan AliNo ratings yet
- NonLinSys NSJ MCTDocument19 pagesNonLinSys NSJ MCTshiwapreetheeNo ratings yet
- Universidad de Las Fuerzas Armadas Espe: Fausto Granda GDocument13 pagesUniversidad de Las Fuerzas Armadas Espe: Fausto Granda GLuis Adrian CamachoNo ratings yet
- Signal & Systems - EE 221 - A-1Document6 pagesSignal & Systems - EE 221 - A-1Piyush OjhaNo ratings yet
- Embedded Control Systems in CC++ - An Introduction For Software Developers Using MATLABDocument214 pagesEmbedded Control Systems in CC++ - An Introduction For Software Developers Using MATLABdiminano2745No ratings yet
- Chapter 1 Signal and SystemsDocument30 pagesChapter 1 Signal and SystemsJex DeyNo ratings yet
- JNTUA Digital Signal Processing Notes - R20Document88 pagesJNTUA Digital Signal Processing Notes - R20durgatathaNo ratings yet
- Review ChapterDocument13 pagesReview ChaptermirosehNo ratings yet
- Basics of Signals and Systems ExplainedDocument81 pagesBasics of Signals and Systems ExplainedSaeed Ali ShahaniNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- (J. Fernández de Cañete, C. Galindo, J. Barbanch (B-Ok - CC)Document373 pages(J. Fernández de Cañete, C. Galindo, J. Barbanch (B-Ok - CC)Camilo Ignacio Arriagada JaraNo ratings yet
- Lab3 Lcs 09032023 100213amDocument31 pagesLab3 Lcs 09032023 100213amMaryam anjumNo ratings yet
- BDSP Lecture 3Document79 pagesBDSP Lecture 3Mohammed FarisNo ratings yet
- Overview Lecture 1: Anders Rantzer and Giacomo ComoDocument6 pagesOverview Lecture 1: Anders Rantzer and Giacomo Comohmalikn7581No ratings yet