You might also like
- Vibration DiagnosticsDocument10 pagesVibration DiagnosticsSpiros LoutridisNo ratings yet
- Aluminium Extrusion Process PlanningDocument10 pagesAluminium Extrusion Process PlanningHarshith Rao VadnalaNo ratings yet
- The Multibody Systems Approach to Vehicle DynamicsFrom EverandThe Multibody Systems Approach to Vehicle DynamicsRating: 5 out of 5 stars5/5 (2)
- MechatronicsDocument264 pagesMechatronicschandra shekharNo ratings yet
- Atlas Copco ZT37 PartsDocument220 pagesAtlas Copco ZT37 Partsjackyt09100% (4)
- Mobile Based Feedback RailwayDocument38 pagesMobile Based Feedback Railwaymansha99No ratings yet
- Corporate HRM Information Scheduler: Submitted in Partial Fulfillment of The Requirement For The Award of Degree ofDocument50 pagesCorporate HRM Information Scheduler: Submitted in Partial Fulfillment of The Requirement For The Award of Degree ofAnonymous ty7mAZNo ratings yet
- Online Railway Reservation System ReportDocument35 pagesOnline Railway Reservation System ReportVipul Sharma67% (18)
- Reliability-Centered Maintenance Planning Based On Computer-Aided FMEADocument7 pagesReliability-Centered Maintenance Planning Based On Computer-Aided FMEAAhmed El-FayoomiNo ratings yet
- Mechatronic Design Concept and Its Application To Pick-And-Place Robotic SystemsDocument25 pagesMechatronic Design Concept and Its Application To Pick-And-Place Robotic SystemsNamLENo ratings yet
- Fitsum ProposalDocument9 pagesFitsum ProposalBarnababas BeyeneNo ratings yet
- Mech AnalyzerDocument7 pagesMech AnalyzerkcshiehNo ratings yet
- Applsci 09 00376 v2 PDFDocument40 pagesApplsci 09 00376 v2 PDFFajar GumilangNo ratings yet
- Chapter ThreeDocument10 pagesChapter Threejohnkamau9416No ratings yet
- The Effectiveness of A Vehicle Manufacturing Line Using Probabilistic Process TimingDocument24 pagesThe Effectiveness of A Vehicle Manufacturing Line Using Probabilistic Process TimingIJRASETPublicationsNo ratings yet
- Building An Algorithm For Predictive MaintenanceDocument13 pagesBuilding An Algorithm For Predictive Maintenancesima.sobhi70No ratings yet
- A Model-Based Approach To Innovation Management of Automotive Control SystemsDocument10 pagesA Model-Based Approach To Innovation Management of Automotive Control SystemsAmadeuszNo ratings yet
- DMS-Railway Management SystemDocument33 pagesDMS-Railway Management SystemSumit UshirNo ratings yet
- (IJCST-V11I2P12) :V. Raghu Ram Chowdary, G. Tejaswini, E. Divya, K. Adity, M. Varjan BabuDocument14 pages(IJCST-V11I2P12) :V. Raghu Ram Chowdary, G. Tejaswini, E. Divya, K. Adity, M. Varjan BabuEighthSenseGroupNo ratings yet
- Government Polytechnic Nandurbar: Maharashtra State Board of Technical EducationDocument15 pagesGovernment Polytechnic Nandurbar: Maharashtra State Board of Technical EducationDev MaratheNo ratings yet
- "Simulation": Sarvajanik College of Engineering & Technology, SuratDocument22 pages"Simulation": Sarvajanik College of Engineering & Technology, Suratanurag bhattNo ratings yet
- Virtual Design Tools: A Technique For Performing Qualitative Human-in-the-Loop System DesignDocument21 pagesVirtual Design Tools: A Technique For Performing Qualitative Human-in-the-Loop System DesignRaguraam ChandrasekharanNo ratings yet
- 2019 KSJ IJAMT v101 pp243-259Document17 pages2019 KSJ IJAMT v101 pp243-259Viktor SokolovNo ratings yet
- Automatic Work Piece Inspection Cum Counter ConveyorDocument10 pagesAutomatic Work Piece Inspection Cum Counter ConveyorIJRASETPublicationsNo ratings yet
- DdadaedDocument2 pagesDdadaedShuraihilqadhi KasuleNo ratings yet
- Advanced Model Based Control of A 6DOF HDocument11 pagesAdvanced Model Based Control of A 6DOF HQaim RazaNo ratings yet
- H01125763 PDFDocument7 pagesH01125763 PDFNaftalia AldaNo ratings yet
- A Synopsis Report On: Road Traffic SystemDocument9 pagesA Synopsis Report On: Road Traffic SystemBadal KumarNo ratings yet
- Annex 3 NPU Student Selection ReportDocument52 pagesAnnex 3 NPU Student Selection ReportAzhar AhamatNo ratings yet
- ACP-Incorporated Perturbation-Resistant Neural Dynamics Controller For Autonomous VehiclesDocument12 pagesACP-Incorporated Perturbation-Resistant Neural Dynamics Controller For Autonomous Vehiclesthanhtan_tvuNo ratings yet
- MB 0044 Set !Document13 pagesMB 0044 Set !DDhanNo ratings yet
- Liuping WangDocument1 pageLiuping WangGodofredoNo ratings yet
- Synopsis of CoursesDocument18 pagesSynopsis of CoursesdvarsastryNo ratings yet
- 2018 - Karnouskos Et Al. - Assessing The Integration of Software Agents and Industrial Automation Systems With ISOIEC 25010Document6 pages2018 - Karnouskos Et Al. - Assessing The Integration of Software Agents and Industrial Automation Systems With ISOIEC 25010ike rhimaNo ratings yet
- Robot Manipulators Trends and DevelopmentDocument676 pagesRobot Manipulators Trends and DevelopmentJosé Ramírez100% (1)
- Small Business Mobile App An Analytical Approach FDocument70 pagesSmall Business Mobile App An Analytical Approach Fkishorekirthik55No ratings yet
- SMU A S: Production & Operation ManagementDocument22 pagesSMU A S: Production & Operation Managementpara2233No ratings yet
- Tracking Locomotion Using Reinforcement LearningDocument9 pagesTracking Locomotion Using Reinforcement LearningIJRASETPublicationsNo ratings yet
- The Traffic Light ControllerDocument12 pagesThe Traffic Light ControllerBabio GandoNo ratings yet
- 1 JouPaper01Document27 pages1 JouPaper01EDU ANDERSON BLAS GENOVEZNo ratings yet
- A New Conceptual Approach To The Design of Hybrid Control Architecture For Autonomous Mobile RobotsDocument27 pagesA New Conceptual Approach To The Design of Hybrid Control Architecture For Autonomous Mobile RobotsEDU ANDERSON BLAS GENOVEZNo ratings yet
- Automated Timetable Generator Using Machine LearningDocument5 pagesAutomated Timetable Generator Using Machine Learningmehari kirosNo ratings yet
- Applsci 12 04570 v2Document24 pagesApplsci 12 04570 v2장호종No ratings yet
- Design and Implementation of An Autonomous Robotic ArmDocument11 pagesDesign and Implementation of An Autonomous Robotic ArmInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mohammed 2013Document17 pagesMohammed 2013FiandjafarNo ratings yet
- An Introduction To Human Systems Integration (HSI) in The U.S. Railroad IndustryDocument17 pagesAn Introduction To Human Systems Integration (HSI) in The U.S. Railroad IndustrymasoudNo ratings yet
- Evaluation Traffic Simulation ModelsDocument7 pagesEvaluation Traffic Simulation ModelsTanzila RahmanNo ratings yet
- Authors' ProfilesDocument378 pagesAuthors' ProfilesHabib MasumNo ratings yet
- Ai ML Lab Project Template FinalDocument27 pagesAi ML Lab Project Template FinalRishabh KhetanNo ratings yet
- Zimit 2018Document16 pagesZimit 2018Trường Quang NguyễnNo ratings yet
- Property Patterns For The Formal Verification of Automated Production Systems ?Document6 pagesProperty Patterns For The Formal Verification of Automated Production Systems ?rcfrcf279No ratings yet
- Multi-Agent Systems For Industrial Applications: Design, Development, and ChallengesDocument27 pagesMulti-Agent Systems For Industrial Applications: Design, Development, and Challengeshyoung65No ratings yet
- Ok Java Case StudyDocument18 pagesOk Java Case Studyht100401No ratings yet
- Synosis Print ReportDocument6 pagesSynosis Print ReportNIKHIL ASNo ratings yet
- TQM CO PEOsDocument4 pagesTQM CO PEOsHarish GVNo ratings yet
- Tuggener 2019Document6 pagesTuggener 2019catNo ratings yet
- Sensores Basilea SuizaDocument17 pagesSensores Basilea SuizaXAILA ROB RONo ratings yet
- Smarsly 2021 eDocument17 pagesSmarsly 2021 ecawifi4523No ratings yet
- Synopsis On Coll MGMTDocument27 pagesSynopsis On Coll MGMTJeffrey ShawNo ratings yet
- Online FDP - Civil Engg-VIT ChennaiDocument2 pagesOnline FDP - Civil Engg-VIT ChennaiDharmesh DharmaNo ratings yet
- DS5300Document4 pagesDS5300kishore kumarNo ratings yet
- In-Flight Characterization of Image Spatial Quality Using Point Spread FunctionsDocument38 pagesIn-Flight Characterization of Image Spatial Quality Using Point Spread Functionssaritha K MenonNo ratings yet
- Dynamic Cold Plate - 2023Document4 pagesDynamic Cold Plate - 2023구경하No ratings yet
- Web Technology Lesson PlanDocument4 pagesWeb Technology Lesson PlanBhavana VenkatNo ratings yet
- Jfet Spice StandardjftDocument18 pagesJfet Spice StandardjftAna Luisa Torres ParedesNo ratings yet
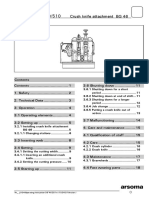
- Crush Knife Attachment - BG46Document19 pagesCrush Knife Attachment - BG46DeniMestiWidiantoNo ratings yet
- Solar PV Methodology - BRIDocument20 pagesSolar PV Methodology - BRI2020dlb121685No ratings yet
- Using Piazza: I. Looking For AnswersDocument3 pagesUsing Piazza: I. Looking For Answersnmra abidNo ratings yet
- Nex TracDocument2 pagesNex TracZouhair WahbiNo ratings yet
- Data Sheet: NPN General Purpose TransistorDocument8 pagesData Sheet: NPN General Purpose TransistorNewsUPdateNo ratings yet
- Lesson Plan - COADocument4 pagesLesson Plan - COAmvdurgadeviNo ratings yet
- TYBCA Cyber Security Notes 1Document99 pagesTYBCA Cyber Security Notes 1pradneshshinde29No ratings yet
- 160 Years of Siemens Umar IjazDocument11 pages160 Years of Siemens Umar Ijazfarhad_iiuiNo ratings yet
- Cs 1Document132 pagesCs 1Nafisa AhmadNo ratings yet
- Pipeline Flooding, Dewatering and VentingDocument10 pagesPipeline Flooding, Dewatering and VentingAntonioNo ratings yet
- Anypoint Platform Development: Fundamentals (Mule 4) Setup RequirementsDocument3 pagesAnypoint Platform Development: Fundamentals (Mule 4) Setup RequirementsKakz KarthikNo ratings yet
- Animal ConcertsDocument5 pagesAnimal ConcertsPR.comNo ratings yet
- Suladan Point of Sall Managment SystemDocument75 pagesSuladan Point of Sall Managment SystemMohamed Ahmed AbdiNo ratings yet
- A. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdDocument70 pagesA. Levitin "Introduction To The Design & Analysis of Algorithms," 3rd EdAmro AbosaifNo ratings yet
- IOT BASED HEALTH MONITORING SYSTEM - DakshDocument17 pagesIOT BASED HEALTH MONITORING SYSTEM - DakshMohit MehraNo ratings yet
- Web3, Also Known As Web 3.0,: TerminologyDocument3 pagesWeb3, Also Known As Web 3.0,: TerminologyDionisio MarquezNo ratings yet
- 2016 - 07 - 05 Com-Sea - 0 - 0Document232 pages2016 - 07 - 05 Com-Sea - 0 - 0Satyamraju PNo ratings yet
- UART To Bus Core SpecificationsDocument10 pagesUART To Bus Core Specificationsgoud.mahesh0584269No ratings yet
- Week 4 (Educational Technology) Answer KeyDocument4 pagesWeek 4 (Educational Technology) Answer KeyChristian PadillaNo ratings yet
- Humber Battery Charger - CDHD-60-24III4-J0说明书 (中英文)Document13 pagesHumber Battery Charger - CDHD-60-24III4-J0说明书 (中英文)Clarence ClarNo ratings yet
- Determining Cause of Fuel Dilution of EnginesDocument6 pagesDetermining Cause of Fuel Dilution of EnginespedriscoNo ratings yet
- MC14043B, MC14044B Cmos Msi: Quad R S LatchesDocument7 pagesMC14043B, MC14044B Cmos Msi: Quad R S LatchespaulpuscasuNo ratings yet