You might also like
- Connected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeFrom EverandConnected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeNo ratings yet
- Google's Self Driven Concept Car: Presented To You By: Shivam Kumar Bca 1 YearDocument21 pagesGoogle's Self Driven Concept Car: Presented To You By: Shivam Kumar Bca 1 YearShivam KumarNo ratings yet
- Robotic Car Seminar ReportDocument27 pagesRobotic Car Seminar ReportTom T Elias100% (9)
- Manual Book Frenic MiniDocument263 pagesManual Book Frenic Miniabdul rahmanNo ratings yet
- Rycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Document67 pagesRycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Bob Laughlin, KWØRLNo ratings yet
- Introduction 1Document22 pagesIntroduction 1SuprithaNo ratings yet
- Self Driving CarsDocument5 pagesSelf Driving CarsJhanavi ReddyNo ratings yet
- Self Driving CarDocument61 pagesSelf Driving Carimmi1989No ratings yet
- Autonomous Cars DocumentDocument11 pagesAutonomous Cars Documentomkarrsv11No ratings yet
- 3 Autonomous VehiclesDocument8 pages3 Autonomous VehiclesCARLOS LOPEZNo ratings yet
- Robotics Project Review-1: Title:-Autonomous Car SimulationDocument8 pagesRobotics Project Review-1: Title:-Autonomous Car SimulationPrayNo ratings yet
- ARTIFICIAL INTELLIGENCE Self Driving Cars-HassaanDocument11 pagesARTIFICIAL INTELLIGENCE Self Driving Cars-Hassaanhassaan.6402No ratings yet
- Ram TPPDocument11 pagesRam TPPJogu PavankalyanNo ratings yet
- 6472 yKR4PJ7Document16 pages6472 yKR4PJ7vishal agnalNo ratings yet
- GPS-copilot: Real-Time Location Based Adaptive Cruise Control System Involving Driver Health and Head Distraction AnalysisDocument5 pagesGPS-copilot: Real-Time Location Based Adaptive Cruise Control System Involving Driver Health and Head Distraction AnalysisInternational Journal of Computer Science and Engineering CommunicationsNo ratings yet
- DRIVERLESS CARS - Wikipedia PDFDocument156 pagesDRIVERLESS CARS - Wikipedia PDFlucky PatilNo ratings yet
- Ministry of Transport AVs Background Paper One Uses CasesDocument22 pagesMinistry of Transport AVs Background Paper One Uses CasesAnish chowdary alapatiNo ratings yet
- Autonomous Car Self Driving Cars UploadDocument20 pagesAutonomous Car Self Driving Cars UploadJake SmithNo ratings yet
- Autonomous Car Self Driving CarsDocument19 pagesAutonomous Car Self Driving Carsamanshahwaz023No ratings yet
- Google Driver Less CarDocument7 pagesGoogle Driver Less CarAman JolheNo ratings yet
- Lo Rui Ann Complete IceDocument17 pagesLo Rui Ann Complete Icerui annNo ratings yet
- Autonomous Car: A.Sivanagaraju P.Naga SudhakarDocument8 pagesAutonomous Car: A.Sivanagaraju P.Naga SudhakarSiva NagarajuNo ratings yet
- Driverless Car Ieee FormatDocument7 pagesDriverless Car Ieee Formatmessi100% (1)
- Autonomous CarDocument1 pageAutonomous Carmeltem parlakNo ratings yet
- Driverless CarDocument21 pagesDriverless Carlhakpa tseringNo ratings yet
- 25977-Automobile Sensors May Usher in Self Driving Cars PDFDocument6 pages25977-Automobile Sensors May Usher in Self Driving Cars PDFSandrawarman BalasundramNo ratings yet
- Saint Louis University School of Engineering and Architecture Department of Electrical EngineeringDocument12 pagesSaint Louis University School of Engineering and Architecture Department of Electrical EngineeringMr. WftyNo ratings yet
- Rapid Automotive InnovationDocument3 pagesRapid Automotive InnovationScott CairnsNo ratings yet
- B3 G1 AimlDocument27 pagesB3 G1 Aimldihosid99100% (1)
- Seminar Project Report ON Trends in Automobile IndustryDocument28 pagesSeminar Project Report ON Trends in Automobile Industrygsrawat123No ratings yet
- Autonomous Car Self Driving Cars UploadDocument19 pagesAutonomous Car Self Driving Cars UploadRohan RahalkarNo ratings yet
- Artificial Intellegency in Car: Presented by-KISHOR CHOPADE Under Guidence of-MR - UDAY BHAPKARDocument18 pagesArtificial Intellegency in Car: Presented by-KISHOR CHOPADE Under Guidence of-MR - UDAY BHAPKARKishor ChopadeNo ratings yet
- Vehicle Towing ReportDocument37 pagesVehicle Towing ReportPratiksha100% (1)
- How Autonomous Vehicles WorkDocument7 pagesHow Autonomous Vehicles WorkJeremy HorneNo ratings yet
- Autonomous CarDocument16 pagesAutonomous CarDeepak MeenaNo ratings yet
- Sensors: System, Design and Experimental Validation of Autonomous Vehicle in An Unconstrained EnvironmentDocument35 pagesSensors: System, Design and Experimental Validation of Autonomous Vehicle in An Unconstrained EnvironmentJM RamirezNo ratings yet
- Traffic Light Detection and Recognition For Autonomous Vehicles PDFDocument7 pagesTraffic Light Detection and Recognition For Autonomous Vehicles PDFAnthony Soares de AlencarNo ratings yet
- Continue: Adaptive Cruise Control System Seminar Report PDFDocument2 pagesContinue: Adaptive Cruise Control System Seminar Report PDFKnightmare 007No ratings yet
- Tesla Autopilot Semi Autonomous Driving, An Uptick For Future AutonomyDocument4 pagesTesla Autopilot Semi Autonomous Driving, An Uptick For Future AutonomyRicardo Zaldívar PichardoNo ratings yet
- Autonomous VehicleDocument15 pagesAutonomous VehiclesohanNo ratings yet
- Sensor and Object Recognition Technologies For Self-Driving CarsDocument9 pagesSensor and Object Recognition Technologies For Self-Driving CarsIsmael MoraesNo ratings yet
- Irfan ReportDocument24 pagesIrfan Reportirphan dalawaiNo ratings yet
- Project ReportDocument12 pagesProject ReportNirmal KumarNo ratings yet
- Autonomous Vehicles: Challenges and Advancements in AI-Based Navigation SystemsDocument12 pagesAutonomous Vehicles: Challenges and Advancements in AI-Based Navigation SystemsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Autonomous VehiclesDocument3 pagesAutonomous VehiclesAdnanNo ratings yet
- Smart Car (Automated Self Driving Car)Document7 pagesSmart Car (Automated Self Driving Car)laukik jahirNo ratings yet
- Evolving A Rule System Controller For Automatic Driving in A Car Racing CompetitionDocument7 pagesEvolving A Rule System Controller For Automatic Driving in A Car Racing Competitionadam sandsNo ratings yet
- ADAS ReportDocument14 pagesADAS ReportRudraksh ShuklaNo ratings yet
- Autonomous ThingsDocument36 pagesAutonomous ThingsRaju top 1234No ratings yet
- Assignment 1: AbstractDocument4 pagesAssignment 1: AbstractSaif ChogleNo ratings yet
- Google's Self Driving CarDocument10 pagesGoogle's Self Driving Carrpraveen88No ratings yet
- Introduction To Self Driving CarsDocument2 pagesIntroduction To Self Driving CarsF. A.No ratings yet
- QNS22020018 3种自动车辆传感器 2022 03 31Document14 pagesQNS22020018 3种自动车辆传感器 2022 03 31fasilNo ratings yet
- J Matpr 2020 04 736Document8 pagesJ Matpr 2020 04 736atul bhagatNo ratings yet
- Autonomous CarDocument1 pageAutonomous Car29 Octavia RamdhaniNo ratings yet
- DLD Research Paper (Ready)Document13 pagesDLD Research Paper (Ready)Jari AbbasNo ratings yet
- Use of ICT in Automobile IndustryDocument3 pagesUse of ICT in Automobile IndustryPasan De Silva100% (2)
- Application of Deep Learning To Develop An Autonomous VehicleDocument11 pagesApplication of Deep Learning To Develop An Autonomous VehicleSalman MNo ratings yet
- Autonomous Vehicle Implementation Predictions: Implications For Transport PlanningDocument19 pagesAutonomous Vehicle Implementation Predictions: Implications For Transport PlanningLethal11No ratings yet
- Opening ReportDocument18 pagesOpening ReportKhamraev AzamatNo ratings yet
- Autonomous Cars - Recent DevelopmentDocument7 pagesAutonomous Cars - Recent DevelopmentpittysNo ratings yet
- The End of Driving: Transportation Systems and Public Policy Planning for Autonomous VehiclesFrom EverandThe End of Driving: Transportation Systems and Public Policy Planning for Autonomous VehiclesNo ratings yet
- Passive SystemsDocument34 pagesPassive Systems706Saurabh BhandariNo ratings yet
- Ncap Star RatingsDocument16 pagesNcap Star Ratings706Saurabh BhandariNo ratings yet
- What Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureDocument63 pagesWhat Is Photogrammetry?: Photos - Light Gramma - To Draw Metron - To MeasureELADIONo ratings yet
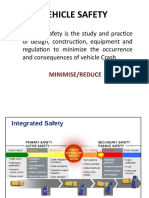
- Intoduction To Vehicle Safety (Autosaved)Document5 pagesIntoduction To Vehicle Safety (Autosaved)706Saurabh BhandariNo ratings yet
- Bharat New Vehicle Safety Assessment Program 19-20Document15 pagesBharat New Vehicle Safety Assessment Program 19-20706Saurabh BhandariNo ratings yet
- Restraint SystemsDocument64 pagesRestraint Systems706Saurabh BhandariNo ratings yet
- ManualDocument110 pagesManual706Saurabh BhandariNo ratings yet
- Simulation of Vehicle Path For Autonomous Vehicles For Different ScenariosDocument24 pagesSimulation of Vehicle Path For Autonomous Vehicles For Different Scenarios706Saurabh BhandariNo ratings yet
- Electronic SystemsDocument100 pagesElectronic Systems706Saurabh BhandariNo ratings yet
- Stellar Phoenix Excel RecoveryDocument9 pagesStellar Phoenix Excel Recoveryharrygrace32No ratings yet
- 26681p020 Navtex - Nav-5 PDFDocument2 pages26681p020 Navtex - Nav-5 PDFdityoz1288No ratings yet
- Grandstream Networks, Inc.: Analog Telephone Adaptor With FXS/FXO PortDocument20 pagesGrandstream Networks, Inc.: Analog Telephone Adaptor With FXS/FXO PortJulian RamirezNo ratings yet
- Tellabs 8000 Network Manager R17A Installation and Configuration Guide For Northbound InterfaceDocument31 pagesTellabs 8000 Network Manager R17A Installation and Configuration Guide For Northbound InterfacenagrajNo ratings yet
- Certificate: of ConformityDocument3 pagesCertificate: of ConformityGerson SouzaNo ratings yet
- Sharp AR-M207, AR-M165, AR-M162 Parts & ServiceDocument178 pagesSharp AR-M207, AR-M165, AR-M162 Parts & Service4555556100% (2)
- Value Chain Analysis - Dell IncDocument2 pagesValue Chain Analysis - Dell IncGANESH JAINNo ratings yet
- Uah 2018 PDR PresentationDocument84 pagesUah 2018 PDR PresentationAdarshNo ratings yet
- MCBSP SPI TutorialDocument3 pagesMCBSP SPI TutorialS Rizwan HaiderNo ratings yet
- Shawn Puri ResumeDocument2 pagesShawn Puri ResumeShawn PuriNo ratings yet
- k2012 Jan E11 Course OutlineDocument1 pagek2012 Jan E11 Course OutlineApril IngramNo ratings yet
- Ittip - Co.cc VNFE 1-2003 AMDocument73 pagesIttip - Co.cc VNFE 1-2003 AMacquatroi2No ratings yet
- Edited Research ProposalDocument4 pagesEdited Research Proposalal_badwiNo ratings yet
- Os ShivaniDocument208 pagesOs ShivaniUmashankar MishraNo ratings yet
- Quality Engineer Control Manager Manufacturing-CVDocument7 pagesQuality Engineer Control Manager Manufacturing-CVabdulyunus_amirNo ratings yet
- DBMS Final Exam (1) 147-166Document20 pagesDBMS Final Exam (1) 147-166Sriharsha BNo ratings yet
- Bitdefender AntivirusDocument4 pagesBitdefender AntivirusMohd Jamil PatahNo ratings yet
- Vizag Steel Plant Management Trainee Syllabus 2020 - MT Exam Pattern PDFDocument21 pagesVizag Steel Plant Management Trainee Syllabus 2020 - MT Exam Pattern PDFEmmaniel rockNo ratings yet
- MR730,720,700,480 Service ManualDocument64 pagesMR730,720,700,480 Service ManualIP3RS RSABHKNo ratings yet
- ECE 3113 - Introduction To RF Circuit DesignDocument5 pagesECE 3113 - Introduction To RF Circuit DesignSrinivas KaratlapelliNo ratings yet
- 523A Finals PDFDocument16 pages523A Finals PDFDexter Custodio0% (1)
- Alumni Placment 2014 2021Document131 pagesAlumni Placment 2014 2021samyakNo ratings yet
- Elmo Motion Control SAX 14 230 Datasheet 202062515269Document6 pagesElmo Motion Control SAX 14 230 Datasheet 202062515269許駿瑋No ratings yet
- Student Handbook - Tech Course IDocument4 pagesStudent Handbook - Tech Course I5129 SRI RAM SNo ratings yet
- Pravin R. AwalkondeDocument3 pagesPravin R. Awalkondepravin awalkondeNo ratings yet
- 700 RTU User ManualDocument81 pages700 RTU User ManualSunny Jun PaclibarNo ratings yet
- AutomationDocument32 pagesAutomationsjsujiprasadNo ratings yet
- Greenlightningai: An Efficient Ai System With Decoupled Structural and Quantitative KnowledgeDocument15 pagesGreenlightningai: An Efficient Ai System With Decoupled Structural and Quantitative Knowledgeyosamec917No ratings yet