You might also like
- UNCITRAL Guide United Nations Commission On International Trade LawDocument56 pagesUNCITRAL Guide United Nations Commission On International Trade Lawsabiont100% (2)
- Final VehiclesDocument35 pagesFinal VehiclesFaizrul YusoffNo ratings yet
- Automatic Gearbox ZF 4HP 20Document40 pagesAutomatic Gearbox ZF 4HP 20Damien Jorgensen100% (3)
- Retail Banking Black BookDocument95 pagesRetail Banking Black Bookomprakash shindeNo ratings yet
- Axera D06Document2 pagesAxera D06Cristián Fernando Cristóbal RoblesNo ratings yet
- 2016 IT - Sheilding Guide PDFDocument40 pages2016 IT - Sheilding Guide PDFlazarosNo ratings yet
- SecuritizationDocument46 pagesSecuritizationHitesh MoreNo ratings yet
- Finite Element Analysis of The Tower CraneDocument4 pagesFinite Element Analysis of The Tower CraneGogyNo ratings yet
- Fatigue Life of A Mining Dump Truck...Document9 pagesFatigue Life of A Mining Dump Truck...Esteban FaundezNo ratings yet
- Pulmonary EmbolismDocument48 pagesPulmonary Embolismganga2424100% (3)
- Methods To Determine Torsional Stiffness in A Semi-Trailer Chassis FrameDocument9 pagesMethods To Determine Torsional Stiffness in A Semi-Trailer Chassis Frameognen88No ratings yet
- 2 To 20 Years - Girls Stature-For-Age and Weight-For-Age PercentilesDocument1 page2 To 20 Years - Girls Stature-For-Age and Weight-For-Age PercentilesRajalakshmi Vengadasamy0% (1)
- Terramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignFrom EverandTerramechanics and Off-Road Vehicle Engineering: Terrain Behaviour, Off-Road Vehicle Performance and DesignRating: 5 out of 5 stars5/5 (1)
- Logiq v12 SM PDFDocument267 pagesLogiq v12 SM PDFpriyaNo ratings yet
- Maritta Koch-Weser, Scott Guggenheim - Social Development in The World Bank - Essays in Honor of Michael M. Cernea-Springer (2021)Document374 pagesMaritta Koch-Weser, Scott Guggenheim - Social Development in The World Bank - Essays in Honor of Michael M. Cernea-Springer (2021)IacobNo ratings yet
- Mechanical Engineering - Workshop Practice - Laboratory ManualDocument77 pagesMechanical Engineering - Workshop Practice - Laboratory Manualrajeevranjan_br100% (4)
- Rollover Stability Analysis of Commercial VehicleDocument6 pagesRollover Stability Analysis of Commercial VehicleMohd SolihinNo ratings yet
- Research On Fatigue Test Method of Car Body For High-Speed TrainsDocument7 pagesResearch On Fatigue Test Method of Car Body For High-Speed TrainsGAUTAM DUANo ratings yet
- Modeling of The Suspension of A Passenger Bus by Finite Element SoftwareDocument3 pagesModeling of The Suspension of A Passenger Bus by Finite Element SoftwarePrasad KhatiNo ratings yet
- Rollover Stability Analysis of Commercial VehicleDocument6 pagesRollover Stability Analysis of Commercial VehicleInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Drag Go Kart IJVD - DraftDocument13 pagesDrag Go Kart IJVD - DraftDuzzysNo ratings yet
- Drag Go Kart IJVD - Draft PDFDocument13 pagesDrag Go Kart IJVD - Draft PDFFardeen PathanNo ratings yet
- Adem Candaş, Serpil Kurt, İsmail Gerdemeli and Eren KayaoğluDocument4 pagesAdem Candaş, Serpil Kurt, İsmail Gerdemeli and Eren KayaoğluAkin ErsozNo ratings yet
- Development of Hybrid Vehicle Energy Consumption Model - I 2020Document20 pagesDevelopment of Hybrid Vehicle Energy Consumption Model - I 2020ruben rosete hernandezNo ratings yet
- Application of Bridge Weigh-in-Motion Measurements in Assessment of Existing Road BridgesDocument8 pagesApplication of Bridge Weigh-in-Motion Measurements in Assessment of Existing Road BridgesawaishahmadNo ratings yet
- Nav 009Document10 pagesNav 009Vishnu Vardhan Reddy YerasiNo ratings yet
- ICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control For Autonomous VehiclesDocument6 pagesICAC2021 YK NAO VV DI DG Optimized Selfadaptive PID Speed Control For Autonomous VehiclesLy Hoang HiepNo ratings yet
- Drakulić 2022 IOP Conf. Ser. Mater. Sci. Eng. 1271 012009Document17 pagesDrakulić 2022 IOP Conf. Ser. Mater. Sci. Eng. 1271 012009Adina ShaikhNo ratings yet
- Experiments On Motion and Oscillation Controls ofDocument6 pagesExperiments On Motion and Oscillation Controls ofAgung Tri PamungkasNo ratings yet
- Advanced Estimation Techniques For Vehicle SystemDocument26 pagesAdvanced Estimation Techniques For Vehicle SystemMinh Thắng NguyễnNo ratings yet
- Influences of The Suspension Parameters On The Vehicle Suspension Performance For A Terrain VehicleDocument5 pagesInfluences of The Suspension Parameters On The Vehicle Suspension Performance For A Terrain VehicleAnonymous 4tBJMwwiNo ratings yet
- Simultaneous Estimation of Wheel-Rail Adhesion and Brake Friction BehaviourDocument6 pagesSimultaneous Estimation of Wheel-Rail Adhesion and Brake Friction BehaviourManjunath AithalNo ratings yet
- Advpub 16-00498Document13 pagesAdvpub 16-00498Aan HunaifiNo ratings yet
- Chassis Design ImportantDocument27 pagesChassis Design ImportantNandan PoojaryNo ratings yet
- 158-02 e PDFDocument6 pages158-02 e PDFjose rosasNo ratings yet
- Weiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangDocument6 pagesWeiwei Li, Lintao Tian, Shaohong Zhang, Shumao Wang, Xin WangMohd SolihinNo ratings yet
- Measuring A Centre of Gravity of An Object Using 4 Load Transducer MethodDocument6 pagesMeasuring A Centre of Gravity of An Object Using 4 Load Transducer MethodSSMNo ratings yet
- Etrij 16 0115 0183Document11 pagesEtrij 16 0115 0183momo3No ratings yet
- Applsci 07 01027 v2 PDFDocument15 pagesApplsci 07 01027 v2 PDFHusain KanchwalaNo ratings yet
- 3 Nejad Et Al-LibreDocument10 pages3 Nejad Et Al-LibreEsthi KusumaNo ratings yet
- Mathematical Modelling of Engineering Problems: Received: 25 October 2021 Accepted: 16 March 2022Document10 pagesMathematical Modelling of Engineering Problems: Received: 25 October 2021 Accepted: 16 March 2022Hailush TgNo ratings yet
- A Tool For Calculating Braking Distances of Rail VDocument5 pagesA Tool For Calculating Braking Distances of Rail VManMohan SharmaNo ratings yet
- Research On Regenerative Braking Control Strategy of Hybrid Electric VehicleDocument4 pagesResearch On Regenerative Braking Control Strategy of Hybrid Electric VehicleRajesh MaleyNo ratings yet
- SHM of Bridges Using WIMDocument10 pagesSHM of Bridges Using WIMsachinoakNo ratings yet
- Evaluation of Vehicle Handling by A Simplified Single Track ModelDocument11 pagesEvaluation of Vehicle Handling by A Simplified Single Track Modelnvs1981No ratings yet
- Moldovanu 2020 IOP Conf. Ser. Mater. Sci. Eng. 898 012015Document6 pagesMoldovanu 2020 IOP Conf. Ser. Mater. Sci. Eng. 898 012015Duy ĐứcNo ratings yet
- Vehicle ModelDocument6 pagesVehicle ModelHattab MakerNo ratings yet
- Mathematical Modeling of Train Dynamics - A Step Towards PC Train SimulatorDocument16 pagesMathematical Modeling of Train Dynamics - A Step Towards PC Train SimulatorLucas BarnabéNo ratings yet
- Tire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresDocument8 pagesTire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresbijejournalNo ratings yet
- CD Paper Pag 227Document10 pagesCD Paper Pag 227Anonymous lEBdswQXmxNo ratings yet
- Research Article: A Data-Driven Approach For Bridge Weigh-in-Motion From Impact Acceleration Responses at Bridge JointsDocument14 pagesResearch Article: A Data-Driven Approach For Bridge Weigh-in-Motion From Impact Acceleration Responses at Bridge JointshromanvaNo ratings yet
- Sensors 23 09691Document27 pagesSensors 23 09691niyexahehcxsvkharkNo ratings yet
- Train Run Curve Simulator (The 6th Asia-Pacific ITS Forum), 2003Document9 pagesTrain Run Curve Simulator (The 6th Asia-Pacific ITS Forum), 2003jcjong11No ratings yet
- ME06 Spoiler With VGsDocument8 pagesME06 Spoiler With VGsariekopriantoNo ratings yet
- Development of Vehicle Chassis From Novel Materials For Light Weight Electric Shuttles Using Finite Element AnalysisDocument13 pagesDevelopment of Vehicle Chassis From Novel Materials For Light Weight Electric Shuttles Using Finite Element AnalysisSnunkhaem EcharojNo ratings yet
- TraileraerodynamicsDocument9 pagesTraileraerodynamicsScurtu Iacob LiviuNo ratings yet
- BAEK Et Al. Fatigue Life Prediction Based On The Rainflow Cycle Counting Method For The End Beam of A Freight Car BogieDocument7 pagesBAEK Et Al. Fatigue Life Prediction Based On The Rainflow Cycle Counting Method For The End Beam of A Freight Car BogiePPNNo ratings yet
- On Dynamic Weighing of Highway Vehicles in Motion: September 2003Document9 pagesOn Dynamic Weighing of Highway Vehicles in Motion: September 2003JonasHirataNo ratings yet
- 1.an Introduction To Regenerative Braking of Electric Vehicles AsDocument5 pages1.an Introduction To Regenerative Braking of Electric Vehicles AsEssa SiddiquiNo ratings yet
- Mechanical Engineering and SciencesDocument11 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- Meyer 2012 Quad Rotor SimulationDocument12 pagesMeyer 2012 Quad Rotor SimulationNicolás Ilich SamusNo ratings yet
- Na Et Al 2014 A Novel Method For Bending Stiffness Evaluation of Bus BodyDocument10 pagesNa Et Al 2014 A Novel Method For Bending Stiffness Evaluation of Bus BodyHồ Thanh TùngNo ratings yet
- Simulation of ATV Roll Cage TestingDocument5 pagesSimulation of ATV Roll Cage TestingIOSRjournalNo ratings yet
- Hadboul 2021 IOP Conf. Ser. Mater. Sci. Eng. 1105 012022Document11 pagesHadboul 2021 IOP Conf. Ser. Mater. Sci. Eng. 1105 012022Luong Ngoc MinhNo ratings yet
- 2 67 1628858339 4ijmperdoct202144Document14 pages2 67 1628858339 4ijmperdoct202144TJPRC PublicationsNo ratings yet
- Ijmet 09 07 045Document13 pagesIjmet 09 07 045shreyashNo ratings yet
- Aspects of Side Impact With Vertical Cylindrical Obstacles: SciencedirectDocument7 pagesAspects of Side Impact With Vertical Cylindrical Obstacles: SciencedirectĐặng Tiến LâmNo ratings yet
- Coast Down Test - Theoretical and Experimental Approach: October 2010Document9 pagesCoast Down Test - Theoretical and Experimental Approach: October 2010giuliobomberNo ratings yet
- Structural Dynamics of The Chassis of A Light Trailer: Walter J. Paucar Casas Jun S. Ono FonsecaDocument8 pagesStructural Dynamics of The Chassis of A Light Trailer: Walter J. Paucar Casas Jun S. Ono FonsecaSanjana ShettyNo ratings yet
- Materials Today: Proceedings: Mohammad Waseem, Mumtaz Ahmad, Aasiya Parveen, Mohd SuhaibDocument5 pagesMaterials Today: Proceedings: Mohammad Waseem, Mumtaz Ahmad, Aasiya Parveen, Mohd Suhaibyogita borudeNo ratings yet
- Standard Test Methods For Rheological Properties of Non-Newtonian Materials by Rotational (Brookfield Type) ViscometerDocument8 pagesStandard Test Methods For Rheological Properties of Non-Newtonian Materials by Rotational (Brookfield Type) ViscometerRodrigo LopezNo ratings yet
- Syllabus PDFDocument3 pagesSyllabus PDFBibin Raj B SNo ratings yet
- UM-140-D00221-07 SeaTrac Developer Guide (Firmware v2.4)Document154 pagesUM-140-D00221-07 SeaTrac Developer Guide (Firmware v2.4)Antony Jacob AshishNo ratings yet
- Statistics and Probability: Quarter 4 - (Week 6)Document8 pagesStatistics and Probability: Quarter 4 - (Week 6)Jessa May MarcosNo ratings yet
- Introduction To DifferentiationDocument10 pagesIntroduction To DifferentiationaurennosNo ratings yet
- C4 Vectors - Vector Lines PDFDocument33 pagesC4 Vectors - Vector Lines PDFMohsin NaveedNo ratings yet
- Curriculum Guide Ay 2021-2022: Dr. Gloria Lacson Foundation Colleges, IncDocument9 pagesCurriculum Guide Ay 2021-2022: Dr. Gloria Lacson Foundation Colleges, IncJean Marie Itang GarciaNo ratings yet
- Matka Queen Jaya BhagatDocument1 pageMatka Queen Jaya BhagatA.K.A. Haji100% (4)
- BLP#1 - Assessment of Community Initiative (3 Files Merged)Document10 pagesBLP#1 - Assessment of Community Initiative (3 Files Merged)John Gladhimer CanlasNo ratings yet
- 07 GDL Web-Site 04 (2021-2022) For 15284Document2 pages07 GDL Web-Site 04 (2021-2022) For 15284ABCDNo ratings yet
- Product Manual 26086 (Revision E) : EGCP-2 Engine Generator Control PackageDocument152 pagesProduct Manual 26086 (Revision E) : EGCP-2 Engine Generator Control PackageErick KurodaNo ratings yet
- Notes On Antibodies PropertiesDocument3 pagesNotes On Antibodies PropertiesBidur Acharya100% (1)
- List of Iconic CPG Projects in SingaporeDocument2 pagesList of Iconic CPG Projects in SingaporeKS LeeNo ratings yet
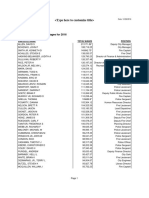
- 2016 W-2 Gross Wages CityDocument16 pages2016 W-2 Gross Wages CityportsmouthheraldNo ratings yet
- CiscoDocument6 pagesCiscoNatalia Kogan0% (2)
- E-Versuri Ro - Rihana - UmbrelaDocument2 pagesE-Versuri Ro - Rihana - Umbrelaanon-821253100% (1)
- Comparative Study Between Online and Offilne Learning With Reference of Tutedude E-LearningDocument61 pagesComparative Study Between Online and Offilne Learning With Reference of Tutedude E-LearningDeeksha Saxena0% (2)
- Epreuve Anglais EG@2022Document12 pagesEpreuve Anglais EG@2022Tresor SokoudjouNo ratings yet
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Document3 pagesWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912No ratings yet