You might also like
- Beam-Column Part 1Document28 pagesBeam-Column Part 1Melchizedek EllNo ratings yet
- Lab Manual FormatDocument22 pagesLab Manual FormatSahil PatelNo ratings yet
- Experiment 12: Buckling TestDocument4 pagesExperiment 12: Buckling TestVenkatesh ThotaNo ratings yet
- Thick Walled Pressure VesselDocument56 pagesThick Walled Pressure VesselErick PalladaNo ratings yet
- How Linear FEA Helps in FatigueDocument7 pagesHow Linear FEA Helps in FatigueShuchi GuptaNo ratings yet
- CE Correl 4Document90 pagesCE Correl 4Marbel PerezNo ratings yet
- Execution and Evaluation of Cyclic Tests at Constant Load Amplitudes - DIN 50100:2016Document8 pagesExecution and Evaluation of Cyclic Tests at Constant Load Amplitudes - DIN 50100:2016TrimakisNo ratings yet
- ME C-15 3 and 4Document189 pagesME C-15 3 and 4nakulNo ratings yet
- Chapter 7-Continuous BeamsDocument11 pagesChapter 7-Continuous BeamsMohamed SalahNo ratings yet
- Module 2 Lecture 7 Forming Analysis-UpperboundDocument8 pagesModule 2 Lecture 7 Forming Analysis-UpperboundAnimesh PradhanNo ratings yet
- Bending Moment in A BeamDocument12 pagesBending Moment in A BeamOdarie HunterNo ratings yet
- Haagensen P6 Life AssessmentsDocument41 pagesHaagensen P6 Life AssessmentsmigescuNo ratings yet
- Final Report - Cornerstone ProjectDocument21 pagesFinal Report - Cornerstone Projectruben dollarz100% (1)
- Comparison of Local Stress of Pipe Support AttchmtDocument24 pagesComparison of Local Stress of Pipe Support AttchmthwdyangNo ratings yet
- Fatigue 2marks N 16 MarksDocument53 pagesFatigue 2marks N 16 MarksAdrian James90% (10)
- Analysis of A Braced Steel Beam-Column Subjected To Axial and Bending LoadsDocument10 pagesAnalysis of A Braced Steel Beam-Column Subjected To Axial and Bending LoadsLemark R.No ratings yet
- Beam Column Sample LectureDocument9 pagesBeam Column Sample LectureCan RapsNo ratings yet
- Stress Analysis of Reactor Nozzle to Head JunctionDocument5 pagesStress Analysis of Reactor Nozzle to Head JunctionMohamed Rafeek0% (1)
- Hydraulic Jump ExperimentDocument16 pagesHydraulic Jump ExperimentDaniel MabengoNo ratings yet
- VISVESVARAYA NATIONAL INSTITUTE OF TECHNOLOGY-NAGPUR SEMINAR REPORT ON SHEAR FORCE & BENDING MOMENTDocument6 pagesVISVESVARAYA NATIONAL INSTITUTE OF TECHNOLOGY-NAGPUR SEMINAR REPORT ON SHEAR FORCE & BENDING MOMENTNikhil MulikNo ratings yet
- Lovely Professional University, Punjab: Detailed Plan For LecturesDocument5 pagesLovely Professional University, Punjab: Detailed Plan For LecturesZain MirNo ratings yet
- Buckling Analysis of Underwater CylindriDocument7 pagesBuckling Analysis of Underwater CylindriMilaniStefanoNo ratings yet
- LAB Manual FEADocument246 pagesLAB Manual FEARajkumar MNo ratings yet
- Theory and Analysis of Flight StructuresDocument16 pagesTheory and Analysis of Flight Structuresirctcsbt6bimblikipil0% (1)
- Mfelab PDFDocument246 pagesMfelab PDFbekjuNo ratings yet
- MECE 311 Mechanics Materials Final Exam ReviewDocument3 pagesMECE 311 Mechanics Materials Final Exam ReviewStephanie BeckNo ratings yet
- 6.bending Moment ManualDocument6 pages6.bending Moment ManualLaksh RameshNo ratings yet
- Tensile For SDocument1 pageTensile For SPankaj ShrivastvaNo ratings yet
- Civil 2nd Year Notes Structural Analysis 1Document85 pagesCivil 2nd Year Notes Structural Analysis 1vaibhav panpatte100% (1)
- Structural Analysis 1 (SA1) - Civil Engineering 2nd Year Notes Notes, Books, Ebook PDF DownloadDocument85 pagesStructural Analysis 1 (SA1) - Civil Engineering 2nd Year Notes Notes, Books, Ebook PDF DownloadVinnie Singh100% (2)
- Engineering MechanicsDocument121 pagesEngineering MechanicsSuresh BalamNo ratings yet
- Andrew Pytel, Ferdinand L. Singer - Strength of Materials (1987, Harpercollins College Div) - Libgen - LiDocument606 pagesAndrew Pytel, Ferdinand L. Singer - Strength of Materials (1987, Harpercollins College Div) - Libgen - LiMoshi ULNo ratings yet
- EXPERIMENTS IN MECHANICS OF SOLIDS: SEMESTER I & IIDocument44 pagesEXPERIMENTS IN MECHANICS OF SOLIDS: SEMESTER I & IIUttamNo ratings yet
- Determine Reactions for Propped Cantilever Beam LabDocument12 pagesDetermine Reactions for Propped Cantilever Beam LabAzian YusoffNo ratings yet
- Mechanics of Materials: Stress and Strain - Axial LoadingDocument42 pagesMechanics of Materials: Stress and Strain - Axial LoadingTuff qualityNo ratings yet
- Determining Deflection of a Curved Davit Using Castigliano's TheoremDocument5 pagesDetermining Deflection of a Curved Davit Using Castigliano's Theoremmuhammad faheem ziaNo ratings yet
- The Stress Analysis - FEMDocument41 pagesThe Stress Analysis - FEMCristian Ioan ȚimbolmașNo ratings yet
- Shear Component of Presstress by Equivalent LoadsDocument14 pagesShear Component of Presstress by Equivalent Loadsunix0123No ratings yet
- Finite Element Methods Course OutlineDocument2 pagesFinite Element Methods Course OutlineKedir ShiferawNo ratings yet
- Mechanics PDFDocument102 pagesMechanics PDFEBBIE V AYROOKUZHYNo ratings yet
- CL141 Engineering Mechanics Laboratory Manual: First Year B.Tech. (CL/ME/EE)Document64 pagesCL141 Engineering Mechanics Laboratory Manual: First Year B.Tech. (CL/ME/EE)Abdul RehmanNo ratings yet
- A Bi-Parametric Wo Hler Curve For High Cycle Multiaxial Fatigue AssessmentDocument16 pagesA Bi-Parametric Wo Hler Curve For High Cycle Multiaxial Fatigue AssessmentReyesHerreraSckalNo ratings yet
- Linearizing StressDocument6 pagesLinearizing Stressbo cambellNo ratings yet
- Topic 1 Revision (HES2120)Document37 pagesTopic 1 Revision (HES2120)Cheow Li JongNo ratings yet
- MECHANICS OF SOLIDS Course SyllabusDocument3 pagesMECHANICS OF SOLIDS Course SyllabusBalagopal VNo ratings yet
- Mech 324 - Prelim - Module No 4Document18 pagesMech 324 - Prelim - Module No 4Aomine DaikiNo ratings yet
- Mechanics of Materials Final PresentationDocument24 pagesMechanics of Materials Final PresentationRadia ChowdhuryNo ratings yet
- Symmetrical Components: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandSymmetrical Components: The Commonwealth and International Library: Applied Electricity and Electronics DivisionRating: 4 out of 5 stars4/5 (2)
- Mechanical PDFDocument195 pagesMechanical PDFVengadasubramanianNo ratings yet
- Analysis & Design of Statically Indeterminate StructuresDocument20 pagesAnalysis & Design of Statically Indeterminate StructuresManisha Shewale50% (2)
- s2 Bending MomentDocument22 pagess2 Bending MomentismailNo ratings yet
- Earthquake-Response Analysis of Long-Span Cable-Stayed Bridge Under Uniform and Non-Uniform ExcitationsDocument6 pagesEarthquake-Response Analysis of Long-Span Cable-Stayed Bridge Under Uniform and Non-Uniform ExcitationsNibbz NibbzcusNo ratings yet
- AE 411 Prelim Module 3 - Continuity and Compressibility PDFDocument22 pagesAE 411 Prelim Module 3 - Continuity and Compressibility PDFKen OracioNo ratings yet
- Modelling of Load Devices Lisans TeziDocument151 pagesModelling of Load Devices Lisans Tezitaner56No ratings yet
- Forces and Pin-Jointed Frames - LectureDocument9 pagesForces and Pin-Jointed Frames - Lecturepilas_nikolaNo ratings yet
- Engr225 Pe-16Document1 pageEngr225 Pe-16ruukiNo ratings yet
- Engr225 Pe-5Document2 pagesEngr225 Pe-5ruukiNo ratings yet
- ENGR 225 Practice Exercise 4Document2 pagesENGR 225 Practice Exercise 4ruukiNo ratings yet
- Engr225 Pe-16Document1 pageEngr225 Pe-16ruukiNo ratings yet
- Engr225 Pe-7Document1 pageEngr225 Pe-7ruukiNo ratings yet
- Content Question Preparation Part2-Optic+answerDocument3 pagesContent Question Preparation Part2-Optic+answerruukiNo ratings yet
- 2021 Ex Oscillations and Communications SystemsDocument2 pages2021 Ex Oscillations and Communications SystemsruukiNo ratings yet
- AA HL - Questionbank - Calculus - EasyDocument74 pagesAA HL - Questionbank - Calculus - EasyruukiNo ratings yet
- Engr225 Pe-6Document1 pageEngr225 Pe-6ruukiNo ratings yet
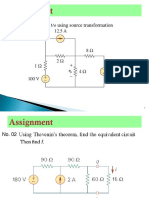
- Week 6 Circuits Theorem.Document25 pagesWeek 6 Circuits Theorem.ruukiNo ratings yet
- Find circuit voltages and energies given currents and initial conditionsDocument2 pagesFind circuit voltages and energies given currents and initial conditionsruukiNo ratings yet
- Content Question Preparation G8 Part 1Document2 pagesContent Question Preparation G8 Part 1ruukiNo ratings yet
- De Anza College Physics 4B - Chiang Fall 2021Document5 pagesDe Anza College Physics 4B - Chiang Fall 2021ruukiNo ratings yet
- Mechanics Assignment Energy, Work and Power ProblemsDocument1 pageMechanics Assignment Energy, Work and Power ProblemsruukiNo ratings yet
- Sample Problem With Solution Lect 06 CIrcuit TheoremsDocument8 pagesSample Problem With Solution Lect 06 CIrcuit TheoremsruukiNo ratings yet
- Assignment #02 Electrical Engineering 02Document2 pagesAssignment #02 Electrical Engineering 02ruukiNo ratings yet
- 2018 HSC PhysicsDocument48 pages2018 HSC PhysicsruukiNo ratings yet
- Eryne Sohor - Term 2 Sound Absorption ExperimentDocument2 pagesEryne Sohor - Term 2 Sound Absorption ExperimentruukiNo ratings yet
- Homework 6 StaticsDocument2 pagesHomework 6 StaticsruukiNo ratings yet
- 4B W2021 MT1 SolutionDocument7 pages4B W2021 MT1 SolutionruukiNo ratings yet
- MEGR3210 Homework2Document3 pagesMEGR3210 Homework2ruukiNo ratings yet
- Inclass Ch5 SolveDocument2 pagesInclass Ch5 SolveruukiNo ratings yet
- MEGR3210 Homework4Document2 pagesMEGR3210 Homework4ruukiNo ratings yet
- Physics Syllabus 2020Document17 pagesPhysics Syllabus 2020Fatima PuspaNo ratings yet
- Pointers EASE 2 Physics Grade 8 2020-2021Document2 pagesPointers EASE 2 Physics Grade 8 2020-2021ruukiNo ratings yet
- HSC Physics Trial ExamDocument35 pagesHSC Physics Trial ExamruukiNo ratings yet
- NUS and NTU Physics Entrance ExamDocument152 pagesNUS and NTU Physics Entrance ExamruukiNo ratings yet
- 2012 Natural Sciences Test-421Document14 pages2012 Natural Sciences Test-421amandashn96No ratings yet
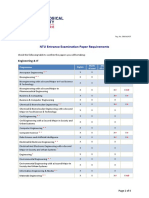
- NTU Entrance Examination Paper Requirements: Engineering & ITDocument4 pagesNTU Entrance Examination Paper Requirements: Engineering & ITDaffa WidyadhanaNo ratings yet