Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Scrambler Machine
1
Prashanth Bhat
Department of Mechanical Engineering, R.N.S Institute of Technology,
Bangalore-98, India
Abstract:- The majority of farmers in tropical parts of set to execute it. A study shows that many accidental falls
the world cultivate areca nut as a commercial crop, occur with old and experienced climbers. This is because of
India being a major producer of this crop with an annual reduction in functional efficiency of arch adapting ligaments
yield of 3.6 lakh tonnes. The current market value for [3]. Most of them end up with bruised hands, deformed feet,
areca nut is 52000 INR per quintal making it a lucrative or at least swelled up hands and feet.
crop to cultivate. Mechanization of this job is very much
required. This reduces occupational hazards and The high skilled tree climbers are reducing and the new
dependency on labourers. In this paper, we present the generation labourers are not motivated to pick up this
design of an engine-powered semi-automatic machine to professional skill as most move to cities to find better living.
climb areca trees thus eliminating manual climbing for This creates huge demand for tree climbers and their
harvesting and spraying purposes. Stability analysis availability during peak seasons becomes more challenging.
gives the key parameters for the design of the chassis. Hence small scale farmers have to spend more than one
Using the parameters, virtual simulation to validate the third of their revenue in these two processes. This manual
model and realization of the model through fabrication method of climbing has to be mechanized as there is
and testing. This machine is useful for climbing trees at a resistance in continuing this profession by the younger
faster rate, less moving parts, use of self-weight for generations due to which labour scarcity is increasing. Most
stability, portability, retrofit model are some of the tree climbers do not take any safety precautions while
advantages of this design. climbing the tree. One side the increasing number of farmers
taking up areca nut cultivation and on the other side
Keywords:- Areca Tree, Climbing Robots, Labour Scarcity, reduction in skilled tree climbers have widened the gap, thus
and Mechanization, Rolling Self-Locking, Stability Analysis. creating an opportunity for mechanization of tree climbing
process.
I. NOMENCLATURE
Integration of man and machine makes the process less
D = Tree Diameter; m = Mass of vehicle(Kg); Fs = labour intensive. Machine which replaces the manual tree
spring force(N) ;W= Weight(N); Ft = tangential force on climbing ensures safety and reduce expenditure, drudgery of
wheels ; Fn1 = Fn2 = Normal force on wheels(N) ; F3 = farmers. It increases in the timeliness of operation and rate
Force on 3rd wheel(N) ;μk = Kinetic Friction(N) ; rw = of production and therefore profitability. An ideal areca tree
Wheel radius(mm). P = Power; Sut = Ultimate tensile climbing machine should be simple to operate, effortlessly
strength; Mt = Torque transmitted ; τ = shear strength; G = climb trees and return , portable, no slipping during rainy
seasons, should not damage tree surface, using less energy
Rigidity Modulus; θ1 = angle of twist in radians.
to operate, large scale operation, least idle time an least cost
to manufacture.
II. INTRODUCTION
III. RELATED WORK
Areca nut is a commercial, lucrative crop to cultivate.
It grows well in tropical high rainfall areas. Many farmers’
This literature survey includes various designs which
incomes depend only on this plantation throughout the year.
have been successful in fabrication and testing their proof of
Over six million people in India are engaged in cultivating,
concept. Tree climbing machine has been under
processing and trade. Being one of the most lucrative crop to
investigation for last 2 decades. Different methods have
cultivate increasing the number of individuals in the supply
been adopted for this purpose. They can be broadly
chain of framing and trading of this crop. Hence the farmer
classified as continues and discrete type of climbing.
is not at advantage position to substitute harvests even
Renganathan (2012) has developed a manual tree climbing
during turbulent periods because of the resource
equipment called Multi tree climber [8] which adopts
particularity of his yield. Pesticide spraying, Harvesting,
discrete climbing technique. Provisions are made for sitting
Drying, De-shelling the nuts are the major processes of this
and holding purposes. It has 2 frames controlled by body
trade. The farmer has to climb a 40-meter-tall slender tree
weight and feet. An adjustable locking pin makes this
and perform spraying and harvesting activities.
equipment a flexible one applicable on trees with various
Unintendedly many farmers put many tree climbers in
diameters. Major disadvantage which demotivates farmers
jeopardy this could imperil their livelihood. There is a
from buying this equipment is that during hands free
strong leap of faith while climbing trees which may turn into
position conscious effort should be made by the person to
leap in the dark because a potential diseased tree can
apply a counter balance force on upper and lower frames to
dismember and brake. Thus tree climbing is itself a part of
prevent slipping and instability. As a safety precaution a
professional activity in this trade requiring a particular skill
harness belt is used.
IJISRT23DEC1584 www.ijisrt.com 2337
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Ganapathi Bhat (2019) has developed a motorized extends and grips the tree, then the lower body retracts
vehicle that can carry humans on top of tree. The Tree to its original position. A spraying unit is attached to the
scooter [5] uses a 2 stroke ohv petrol engines as prime lower part of the machine and the harvesting module can be
mover. A clutch reducer gearbox, sprockets and 2 chain attached to the upper part of the machine. The compressor is
drives are used as power transmission to control front and required to maintain air pressure, but this model is not
top wheels which rotate in opposite directions. It uses drum effective because of the scale of the field and terrain of the
brakes to minimize the input force. For safety additional land, it would be difficult to carry a compressor around
brake unit and harness belt are used. The machine has two the farm. Bekal (2017) has designed and fabricated.
tyres and a roller that interlocks to grasp the tree’s smooth
trunk. This is a scooter machine capable of caring human Tree climber machine [14] which works on the basic
with max load of 80 kgs. Major concern is that during principle of friction with a X frame and two rollers at the
spraying and harvesting seasons the tree surface would be bottom. The conically shaped rollers provide wedge action
soft and slippery because of constant exposure to high between the tree surfaces, maintain a strong contact. It also
moisture and humidity. If the machine fails by slip human consists of a movable arm which can rotate at a 360 degree
life would be at stake. In case the brake fails, a backup brake angle and is used for spraying pesticides. It is connected to a
will jam the wheels and stop the vehicle from rolling down Battery whose wires are passed all the way down the tree to
the tree. Another concern is that if that tree diameter is less the ground. The machine is controlled based on human
than 3.5 inches then it would add huge strain on tree and judgment and also the system is only restricted up to the
also may shear the tree which is a dangerous to lives of spraying of pesticides hence these drawbacks limit the use
humans. of this machine at a certain height up to a visible range.
Prakasan (2013) fabricated a manual tree climber An autonomous robot [17] built by Devang et al.2010.
machine called Wonder Climber [7] which uses a rope, is capable of climbing and pruning areca trees. It is a non-
pulley mechanism to operate and it or is safer compared to linear self-regulating system with flexible structure. This
other climbing techniques. lt is again a discrete motion as continuous motion system is powered by two motors with
there is expansion and contraction using pulley and spring 30 kg-cm torque capacity. It uses a self-stabilizing climbing
mechanism. Considering the vastness of areca plantation technique. There are 2 active and passive wheels to achieve
this machine is very slow in climbing, harvesting and this objective. The robot structure is made of PMMA
detaching. material making it light weight A PUMA arm with 5 DOF is
mounted on robot and is used for harvesting purpose. Digital
Autonomous tree climber robot [9] is a low cost image processing and object recognition is used as
prototype which uses discrete climbing technique. This intelligence. The microcontroller is arm cortex with Da
work includes DH conversion for manipulators, mechanical Vinci processor. A manual override is provided in case of
design, motor selection, locomotion algorithm development automation failure.
and fabrication. Power screws are used for actuation while
ascending and descending. A robotic manipulator with a IV. METHODOLOGY
rotary blade as end effector is used for harvesting purpose.
The robot is autonomous but can be remotely overridden. The semi-automated tree climber is designed to climb
The locking mechanism happens from detecting the surge in the areca nut tree and harvest it. In this paper we present the
current and the control action is implemented to prevent stability analysis, design and testing of areca tree climbing
further tightening. To detect extreme points of vertical machine.
motion IR sensors are used the prototype is in its initial
stages and needs further work to make it efficient. The stability is important criteria for designing this
machine. The center of gravity is away from tree creating an
Pole climbing robot UT-PCR [2] was designed and anti-clock wise moment around tree creating a compressive
fabricated by A.Sadeghi et al (2011). It is a continuous type force which increases the grip, thus enabling traction. When
of climbing robot using a natural compensation for stability. the strut forces were less, due less traction it was slipping.
This is simple design with less moving parts inspired by Getting a perfect balance point between these parameters
primate climbing technique. The increased payload was the key to stability and smooth climbing. Climbing
enhances traction. it is shown that beyond threshold based on Rolling self-locking phenomena that locking
frictional force stability is independent of weight factor. The happens by only friction forces only [1]. The condition must
robot is driven by motors and uses a v shaped wheels to satisfy such that the frictional forces must be greater than
increase the area of contact and also to constrain the the vertical component of the weight and in accordance, the
direction of motion. This robot is successfully tested in 2 geometry must be designed.
sizes. It is used for electric pole climbing and cleaning the
street lights. UT-PCRII was designed with a special characteristic:
the heavier the payload, the better the stability of the robot.
Pneumatic tree climber [12] uses compressed air to The self-weight of the robot creates high frictional
climb trees. The harvesting mechanism is through the forces to enhance traction and acts as a natural
shearing effect of the pruning blade which uses compressed compensation for enhanced payload [2].
air to actuate. It is designed such that the upper body
IJISRT23DEC1584 www.ijisrt.com 2338
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
IJISRT23DEC1584 www.ijisrt.com 2339
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
IJISRT23DEC1584 www.ijisrt.com 2340
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
IJISRT23DEC1584 www.ijisrt.com 2341
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Fig 7 Top View
Fig 4 Wheel A (at 3.5’’ dia. tree)
3-D Model
Fig 5 Wheel C (Accommodating for all tree diameters)
Fig 8 Isometric View
2-D Model-
V. SIMULATION AND RESULTS
The simulation solver solves the governing physics in
time bound manner. Static and dynamic frictional
coefficient of 0.75 and 0.8 respectively are used to simulate
3d contact. Engine and gas strut forces are applied
respectively on the ends of the frame. Using the motion
analysis tool dynamic analysis was performed to visualize
the system in action as shown in fig 9.
Multibody dynamics software Msc Adams solver was
used which is integrated into solid-works as motion analysis
toolbox which performs Multibody dynamics simulations.
From the theoretical calculations slip is one factor which has
to be minimized as the machine has to perform with
minimum slip condition. Hence the objective is to determine
the minimum coefficient of friction for stability and no slip
condition the forces required by the gas struts to provide
enough force for grip. This helps to study the power
consumption, torque required, reaction force, frictional
Fig 6 Front View forces, time taken to complete the task from which
slipping can be avoided.
IJISRT23DEC1584 www.ijisrt.com 2342
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
Parameters Involved for Motion Analysis are as follows, Simulation Results
Integrator type GSTIFF
Iterations 50
Initial integration step 1e -4
Min integral step size 1e-7
Max integral slip1e-2
Jacobean entry
3d cad data resolution
Static friction of 0.9
Dynamic friction of 0.8
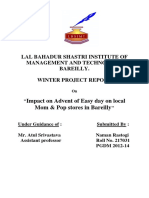
Fig 11 Reaction Force Plots
Figure 11shows the reaction forces of the wheels a,b,c
with resprect to time.The decrement in reaction force with
resepct to time is proportional to the reduction in tree
diameter with altitude. The thin cross section of the tree at
the top reacts lesser that the bottom portion of the tree hence
more force is required to stablize the machine at the top as
shown in fig 10.
Fig 9 Simulation
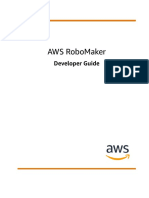
Fig.12. Velocity v.s time
From Figure 12, we see that the climbing rate is 570
mm/sec and the model attained the height of 3842mm in 5
seconds resulting in the climbing rate of 5670mm/sec.
Fig 13 Torque Plot
Fig 10 Static Test on Tree
IJISRT23DEC1584 www.ijisrt.com 2343
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
While experimenting we noted that slip occurs when
friction are below 0.6 but stable at.7 gradually increasing
traction. The analytical model and results from simulation
helped to get design insights for fabrication to reduce
iterative design cost.
Figure 13 shows that torque increases with reduction in
diameter as the machine ascends the tree. These plots give
significant design insight on position quantity of peak power
requirements for fabrication.
FEA Results
Finite element analysis is performed to inspect the
stress levels, deformations in the model. From fig 14, 15 we
see the static structural analysis using ansys software v3
version to determine von mises stress and total deformation.
Forces from body weight, engine inertia, gas struts, and
wheels were considered. The material used is structural
steel. The frame was meshed with medium smooth quality
with 14598 nodes and 6939 elements. Maximum von mises
stress of 34 Mpa and deformation of 0.29 mm. Here the
frame performed well with safe stress levels and negligible
displacements.
Fig 15 Total Deformation
VI. CONCLUSION AND FUTURE WORK
Labour scarcity has emerged foremost challenge as the
demand during the peak harvesting, spraying seasons are
rising. Mechanization of this job reduces the expenditure of
farmers and most importantly reducing occupational
hazards.This project involves design, analysis, and
fabrication of a semi- automated tree climber machine. It
has been tested for working conditions, the machine climbs
the tree thus reducing labour dependency to achieve this task
and thus reducing the occupation hazards.Center of mass is
placed significantly away to stabilize the machine.
Using FEA, MBD, structural, dynamic evaluation was
done using Solid Works and Ansys softwares. Motion
analysis was done on virtual model to check stability in
static and dynamic conditions. Easy removal from tree
which saves time and reducing effort, lightweight design
make it easy to carry around the farm. This machine is a
base machine for which provisions for attachments like
pesticide spraying and areca tree harvester can be designed
and fabricated. It is currently in semi-automatic stage but
can be further developed to become a fully-fledged
Fig.14. Von- Mises stress automated system with sensors and actuators.
The machine can be further optimized by increasing
the maximum efficiency by altering the bent angles of frame
the distance of the center of mass, wheel geometry. Wheel
force transducers can be used to determine the forces on the
tree that cause the tree to break. This can be achieved by
the application of Kill switch with sensor sensing the brake
point of tree.
IJISRT23DEC1584 www.ijisrt.com 2344
Volume 8, Issue 12, December – 2023 International Journal of Innovative Science and Research Technology
ISSN No:-2456-2165
REFERENCES
[1]. Fauroux, J.-C. (2010). Design of a climbing robot for
cylindro-conic poles based on rolling self-locking.
Industrial Robot: An International Journal. 37.
10.1108/01439911011037695.
[2]. Sadeghi, Ali & Moradi, Hadi & Ahmadabadi, Majid.
(2012). Analysis, simulation, and implementation of
a human-inspired pole climbing robot. Robotica. 30.
279 - 287. 10.1017/S0263574711000579.
[3]. Kumar, Arunachalam. (2014). A study of footprints
of tree climbing communities of South India, Nitte
University Journal of Health Science. 4. 60-64.
10.1055/s-0040-1703833.
[4]. A.P., Mohankumar & Krishnan, D & Kathirvel, K.
(2013). African Journal of Agricultural Research
Development of ergo refined coconut tree climbing
device. 8. 5530-5537.
[5]. https://www.indiatvnews.com/news/india-karnataka-
farmer-invents- ingenious-motorbike-to-climb-areca-
nut-trees-527775
[6]. M. J. Joseph, Device to Climb Arecanut or
Coconut Tree, National Innovation Foundation,
India, 2002. [3].
[7]. Prakasan, The Wonder Climber of Arecanut Tree,
Altermedia, 2013.
[8]. https://nif.org.in/innovation/coconut_tree_climber/471
[9]. Dubey, Akshay & Pattnaik, Santosh & Banerjee,
Arunava & Sarkar, Rajasree & R., Saravana. (2016).
Autonomous Control and Implementation of
Coconut Tree Climbing and Harvesting Robot.
Procedia Computer Science. 85. 755-766.
10.1016/j.procs.2016.05.263.
[10]. Design of machine elements by V.B Bhandari.
[11]. Design data handbook by Dr.K. Lingaiah,Prof. B.R
Narayana Iyengar.
[12]. Design and Fabrication of Pneumatic Coconut Tree
Climber . https://www.irjet.net/archives/V7/i4/IRJET-
V7I4506.pdf
[13]. Prof. G.S Bhalla., “The Nature of Agricultural
Development in India”
[14]. Jnanesh Bekal, M Jnanasagar Kamath, Manjunath K,
Nixon D’souza. “Tree climber machine”. Dept. of
electrical and Electronics engg. St. Joseph engg.
Collage Vamanjoor.
[15]. Mani A, Jothilingam A, “Design and Fabrication of
Coconut Harvesting Robot: Cocobot”, International
Journal of Innovative Research in Science,
Engineering and Technology, Volume 3, Special
Issue 3, March 2014.
[16]. Hamed Shokripour, Wan Ishak Wan Ismail and
Zahra Moez Karimi “Development of a self-
balancing controlled tree climbing robot”
[17]. P. S. Devang, N. A. Gokul, M. Ranjana, S.
Swaminathan and B. N. Binoy, "Autonomous
arecanut tree climbing and pruning robot,"
INTERACT-2010, 2010, pp. 278-282, doi:
10.1109/INTERACT.2010.5706160.
IJISRT23DEC1584 www.ijisrt.com 2345
You might also like
- Peter Giese, J. Behrmann (Auth.), P. Giese, J. Behrmann (Eds.) - Active Continental Margins - Present and Past-Springer-Verlag Berlin Heidelberg (1994)Document249 pagesPeter Giese, J. Behrmann (Auth.), P. Giese, J. Behrmann (Eds.) - Active Continental Margins - Present and Past-Springer-Verlag Berlin Heidelberg (1994)KHIRI KHALFNo ratings yet
- August-Current Affairs-Part-3Document9 pagesAugust-Current Affairs-Part-3sailuteluguNo ratings yet
- STD X - Chapter - 6 Natural Vegetation NotesDocument8 pagesSTD X - Chapter - 6 Natural Vegetation NotesRuchira Sanket KaleNo ratings yet
- Tribal-Based Environmental Awareness For Contextualizing Indigenous People Education (IPED) Learners' Grade 10 Science LessonsDocument12 pagesTribal-Based Environmental Awareness For Contextualizing Indigenous People Education (IPED) Learners' Grade 10 Science LessonsPsychology and Education: A Multidisciplinary JournalNo ratings yet
- Dwija Anukkam July 2023-1Document32 pagesDwija Anukkam July 2023-1Santhosh MenonNo ratings yet
- Tab. Handy 05.09Document30 pagesTab. Handy 05.09Aidre SoaresNo ratings yet
- Resume ZubairAliJunaidDocument2 pagesResume ZubairAliJunaidZee100% (1)
- CT071-3-3-DDAC-Class Test Paper #2-AnswerDocument12 pagesCT071-3-3-DDAC-Class Test Paper #2-AnswerPurnima OliNo ratings yet
- Tailored Fertilizer Application Recommendations For Cassava - Nigeria AcreDocument2 pagesTailored Fertilizer Application Recommendations For Cassava - Nigeria AcreNoah MandaNo ratings yet
- The Upstate Shopper Is Now Available at All Bi-Lo StoresDocument16 pagesThe Upstate Shopper Is Now Available at All Bi-Lo StoresCoolerAds100% (2)
- GDSC LPU Info Session - 2023Document54 pagesGDSC LPU Info Session - 2023GDSC LPUNo ratings yet
- Pediatric Restorative Option For Congenitally Missing Anterior Teeth A Carolina Bridge Case SeriesDocument10 pagesPediatric Restorative Option For Congenitally Missing Anterior Teeth A Carolina Bridge Case SeriesAthenaeum Scientific PublishersNo ratings yet
- Medius Technologies - Technical Round WADocument15 pagesMedius Technologies - Technical Round WAJaya BhatiaNo ratings yet
- Helpful links and tips for downloading AuditionPH installers, patches, and troubleshooting errorsDocument4 pagesHelpful links and tips for downloading AuditionPH installers, patches, and troubleshooting errorsMarcus BrutusNo ratings yet
- Real Number NCERT Exemplar Hand Written SolutionsDocument7 pagesReal Number NCERT Exemplar Hand Written SolutionsSaksham Khushwaha 4G GNNo ratings yet
- Flytec ComputersDocument65 pagesFlytec ComputersGP GPNo ratings yet
- Í - T pÈ0Â DIGOSÂDOCTORSÂHOS ÂÂÂ Â ÇP") &77Î Digos Doctors Hospital IncDocument2 pagesÍ - T pÈ0Â DIGOSÂDOCTORSÂHOS ÂÂÂ Â ÇP") &77Î Digos Doctors Hospital IncDigos Doctors' Hospital, Inc. IT DepartmentNo ratings yet
- Math &esp With Tos 1st QuarterDocument24 pagesMath &esp With Tos 1st QuarterCristitaPobreSanchezNo ratings yet
- User's Manual: GB NL F E D IDocument21 pagesUser's Manual: GB NL F E D IFlorea NicolaeNo ratings yet
- AOICON2024Document7 pagesAOICON2024Drkrantianand AnandNo ratings yet
- Tek No Speed Pumps by LowaraDocument20 pagesTek No Speed Pumps by LowaraCatalin Frincu100% (1)
- Acme WidgetsDocument5 pagesAcme WidgetsBria DuncombeNo ratings yet
- Community Service PresentationDocument17 pagesCommunity Service PresentationLiopNo ratings yet
- Resume Rishab Bhandari2Document1 pageResume Rishab Bhandari2samuel.kumarNo ratings yet
- ( (Group 6 - (Sie1011) )Document29 pages( (Group 6 - (Sie1011) )Rohit KarmakerNo ratings yet
- Page 1 / 9Document10 pagesPage 1 / 9Ion CovanjiNo ratings yet
- Marketing Perception and Consumer Buying Behaviour of Adama Fungicide (Macoban C) in Kaushambi District of Uttar PradeshDocument7 pagesMarketing Perception and Consumer Buying Behaviour of Adama Fungicide (Macoban C) in Kaushambi District of Uttar PradeshInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Azm IoclDocument7 pagesAzm IoclSkand UpadhyayNo ratings yet
- Date Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing BalanceDocument15 pagesDate Narration Chq./Ref - No. Value DT Withdrawal Amt. Deposit Amt. Closing Balancerajdulari077No ratings yet
- Shrimantee Roy - ResumeDocument3 pagesShrimantee Roy - ResumeShrimantee RoyNo ratings yet
- STABILIZING OPEN QUANTUM BATTERIESDocument9 pagesSTABILIZING OPEN QUANTUM BATTERIESOscar BohórquezNo ratings yet
- Impact of Easy Day on Local StoresDocument38 pagesImpact of Easy Day on Local StoresAnand shawNo ratings yet
- Comandos Cisco Ccna ExplorationDocument23 pagesComandos Cisco Ccna ExplorationJolver Gerardo Diaz FinettiNo ratings yet
- Economics - Class 9-10-11-12Document75 pagesEconomics - Class 9-10-11-12goyalrohit924No ratings yet
- Phosphonics Catalogue 2011 FullDocument80 pagesPhosphonics Catalogue 2011 Fullapi-94537271No ratings yet
- E Commerece, e BankingDocument8 pagesE Commerece, e BankingAman GuptaNo ratings yet
- MU-SIGMA PREVIOUS YEARS' QUESTIONSDocument8 pagesMU-SIGMA PREVIOUS YEARS' QUESTIONSMahesh Pandey67% (3)
- Tech Team JDDocument3 pagesTech Team JDtaposh.barmonNo ratings yet
- Organised Versus Unorganised Retail in IndiaDocument11 pagesOrganised Versus Unorganised Retail in IndiaSharma Sumant0% (1)
- To Know More, Download Study IQ APP: M.studyiq - AndroidDocument59 pagesTo Know More, Download Study IQ APP: M.studyiq - AndroidBraj KishorNo ratings yet
- Seminar Topic Endodontic Surgery With Focus On Magnification & IlluminationDocument188 pagesSeminar Topic Endodontic Surgery With Focus On Magnification & IlluminationMonalisa DebbarmaNo ratings yet
- Bayer Cropscience - 4QFY19 Result - Kotak PDFDocument6 pagesBayer Cropscience - 4QFY19 Result - Kotak PDFdarshanmadeNo ratings yet
- Sub: Risk Assumption Letter: Insured & Vehicle DetailsDocument4 pagesSub: Risk Assumption Letter: Insured & Vehicle DetailsPawan KumarNo ratings yet
- Hamza 2018 J. Phys. Conf. Ser. 1123 012063Document10 pagesHamza 2018 J. Phys. Conf. Ser. 1123 012063Sanjay singhNo ratings yet
- Waterfront City FAQ EnglishDocument7 pagesWaterfront City FAQ EnglishkarimakkiNo ratings yet
- HBase and Apache PhoenixDocument6 pagesHBase and Apache PhoenixAmitNo ratings yet
- 1920 Golden AgeDocument716 pages1920 Golden Agesoybeat0% (1)
- Prajya Dec 2022 Digital - Final 1 PDFDocument68 pagesPrajya Dec 2022 Digital - Final 1 PDFSasikumar RNo ratings yet
- Adva MineDocument2 pagesAdva MineEdgard GonzalesNo ratings yet
- Go Wyoming (Fall 2023)Document32 pagesGo Wyoming (Fall 2023)The Livingston County NewsNo ratings yet
- How Nous-Hermes-13B AI Model Can Help You Generate High Quality Content and CodeDocument8 pagesHow Nous-Hermes-13B AI Model Can Help You Generate High Quality Content and CodeMy SocialNo ratings yet
- 865G&GV&PE7MF EN Manual V1.0 0404Document70 pages865G&GV&PE7MF EN Manual V1.0 0404David Alexander Ortiz RodriguezNo ratings yet
- 08 Joshi Jumli MarshiDocument5 pages08 Joshi Jumli MarshiPravin OjhaNo ratings yet
- CELLULAR RESPIRATION BiologyDocument59 pagesCELLULAR RESPIRATION BiologyNur SafirahNo ratings yet
- CV-Amit KumarDocument4 pagesCV-Amit KumarAmit KumarNo ratings yet
- OBG Frequency ListDocument6 pagesOBG Frequency Listsakshiyadav677No ratings yet
- 2000-05 The Computer Paper - Ontario EditionDocument143 pages2000-05 The Computer Paper - Ontario Editionthecomputerpaper0% (1)
- Compare Food-Based Sites: Source and ResourcesDocument2 pagesCompare Food-Based Sites: Source and Resourcessantosh sanjyalNo ratings yet
- Videos James Wharram Designs 3Document4 pagesVideos James Wharram Designs 3noel elizagaNo ratings yet
- Design and Fabrication of Agricultural Waste Shredder MachineDocument8 pagesDesign and Fabrication of Agricultural Waste Shredder MachineMahabub AlamNo ratings yet
- An Industry that Capitalizes off of Women’s Insecurities?Document8 pagesAn Industry that Capitalizes off of Women’s Insecurities?International Journal of Innovative Science and Research TechnologyNo ratings yet
- Study Assessing Viability of Installing 20kw Solar Power for the Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoDocument6 pagesStudy Assessing Viability of Installing 20kw Solar Power for the Electrical & Electronic Engineering Department Rufus Giwa Polytechnic OwoInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Cyber Security Awareness and Educational Outcomes of Grade 4 LearnersDocument33 pagesCyber Security Awareness and Educational Outcomes of Grade 4 LearnersInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueDocument2 pagesParastomal Hernia: A Case Report, Repaired by Modified Laparascopic Sugarbaker TechniqueInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Blockchain based Decentralized ApplicationDocument7 pagesBlockchain based Decentralized ApplicationInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Cities: Boosting Economic Growth through Innovation and EfficiencyDocument19 pagesSmart Cities: Boosting Economic Growth through Innovation and EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Visual Water: An Integration of App and Web to Understand Chemical ElementsDocument5 pagesVisual Water: An Integration of App and Web to Understand Chemical ElementsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unmasking Phishing Threats through Cutting-Edge Machine LearningDocument8 pagesUnmasking Phishing Threats through Cutting-Edge Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Compact and Wearable Ventilator System for Enhanced Patient CareDocument4 pagesCompact and Wearable Ventilator System for Enhanced Patient CareInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Factors Influencing the Use of Improved Maize Seed and Participation in the Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaDocument6 pagesFactors Influencing the Use of Improved Maize Seed and Participation in the Seed Demonstration Program by Smallholder Farmers in Kwali Area Council Abuja, NigeriaInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Impact of Silver Nanoparticles Infused in Blood in a Stenosed Artery under the Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in a Sten. Art. Under the Eff. of Mag. FieldDocument6 pagesImpact of Silver Nanoparticles Infused in Blood in a Stenosed Artery under the Effect of Magnetic Field Imp. of Silver Nano. Inf. in Blood in a Sten. Art. Under the Eff. of Mag. FieldInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolDocument31 pagesThe Relationship between Teacher Reflective Practice and Students Engagement in the Public Elementary SchoolInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Insights into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesDocument8 pagesInsights into Nipah Virus: A Review of Epidemiology, Pathogenesis, and Therapeutic AdvancesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Smart Health Care SystemDocument8 pagesSmart Health Care SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Air Quality Index Prediction using Bi-LSTMDocument8 pagesAir Quality Index Prediction using Bi-LSTMInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Implications of Adnexal Invasions in Primary Extramammary Paget’s Disease: A Systematic ReviewDocument6 pagesImplications of Adnexal Invasions in Primary Extramammary Paget’s Disease: A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Predict the Heart Attack Possibilities Using Machine LearningDocument2 pagesPredict the Heart Attack Possibilities Using Machine LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Harnessing Open Innovation for Translating Global Languages into Indian LanuagesDocument7 pagesHarnessing Open Innovation for Translating Global Languages into Indian LanuagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Exploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractDocument7 pagesExploring the Molecular Docking Interactions between the Polyherbal Formulation Ibadhychooranam and Human Aldose Reductase Enzyme as a Novel Approach for Investigating its Potential Efficacy in Management of CataractInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- An Analysis on Mental Health Issues among IndividualsDocument6 pagesAn Analysis on Mental Health Issues among IndividualsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Dense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)Document2 pagesDense Wavelength Division Multiplexing (DWDM) in IT Networks: A Leap Beyond Synchronous Digital Hierarchy (SDH)International Journal of Innovative Science and Research TechnologyNo ratings yet
- Advancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisDocument8 pagesAdvancing Healthcare Predictions: Harnessing Machine Learning for Accurate Health Index PrognosisInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Investigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatDocument16 pagesInvestigating Factors Influencing Employee Absenteeism: A Case Study of Secondary Schools in MuscatInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Parkinson’s Detection Using Voice Features and Spiral DrawingsDocument5 pagesParkinson’s Detection Using Voice Features and Spiral DrawingsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIDocument6 pagesThe Making of Object Recognition Eyeglasses for the Visually Impaired using Image AIInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterDocument11 pagesThe Utilization of Date Palm (Phoenix dactylifera) Leaf Fiber as a Main Component in Making an Improvised Water FilterInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- The Impact of Digital Marketing Dimensions on Customer SatisfactionDocument6 pagesThe Impact of Digital Marketing Dimensions on Customer SatisfactionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Formulation and Evaluation of Poly Herbal Body ScrubDocument6 pagesFormulation and Evaluation of Poly Herbal Body ScrubInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diabetic Retinopathy Stage Detection Using CNN and Inception V3Document9 pagesDiabetic Retinopathy Stage Detection Using CNN and Inception V3International Journal of Innovative Science and Research TechnologyNo ratings yet
- Terracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonDocument14 pagesTerracing as an Old-Style Scheme of Soil Water Preservation in Djingliya-Mandara Mountains- CameroonInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Unit 8Document11 pagesUnit 8FranciscaBalasSuarezNo ratings yet
- SolenoidDocument4 pagesSolenoidTarun ChandraNo ratings yet
- High-Speed, Low-Profile Design: Key BenefitsDocument2 pagesHigh-Speed, Low-Profile Design: Key BenefitsDave MorelandNo ratings yet
- A Teaching Demonstration Set of A 5DOF Robotic Arm Controlled by PLCInternational Journal of Information and Education TechnologyDocument5 pagesA Teaching Demonstration Set of A 5DOF Robotic Arm Controlled by PLCInternational Journal of Information and Education TechnologytheinNo ratings yet
- Projects List and ReferencesDocument5 pagesProjects List and Referencesjhon mathewsNo ratings yet
- Game Manual Part 2 TraditionalDocument55 pagesGame Manual Part 2 TraditionalCristina-Elena CartasNo ratings yet
- Devil's Flight Gamebook IndieDocument87 pagesDevil's Flight Gamebook IndieDaniel Alexandre da SilvaNo ratings yet
- Discussion 2Document3 pagesDiscussion 2Punita DoleNo ratings yet
- Ethical DilemmasDocument4 pagesEthical DilemmasPatricia Camille AustriaNo ratings yet
- Fire Fighting Robot VehicleDocument3 pagesFire Fighting Robot VehicleJeevanandam ShanmugasundaramNo ratings yet
- RobotHandbook PDFDocument12 pagesRobotHandbook PDFToscotronixNo ratings yet
- De Es ZG561 PDFDocument59 pagesDe Es ZG561 PDFamareshhrNo ratings yet
- Seminar ReportDocument35 pagesSeminar Reportsammuel johnNo ratings yet
- Volume 10 - 2021 - Tech - Trends - Robots - 5G - TransportationDocument89 pagesVolume 10 - 2021 - Tech - Trends - Robots - 5G - TransportationAnh Phung DucNo ratings yet
- Can Robotics Increase The Rate of Unemployment in Hospitals in The FutureDocument9 pagesCan Robotics Increase The Rate of Unemployment in Hospitals in The Futureapi-462519362No ratings yet
- Abhisar Parate Resume PDFDocument1 pageAbhisar Parate Resume PDFSaket SharmaNo ratings yet
- RC Buttons PDFDocument3 pagesRC Buttons PDFMohammad TahirNo ratings yet
- UNIT-1 Introduction To AI - FinalDocument95 pagesUNIT-1 Introduction To AI - Finalkarthik reddyNo ratings yet
- Agriculture-Robot-Seminar ReportDocument21 pagesAgriculture-Robot-Seminar ReportAbhimanyu Singh Bhati83% (18)
- Robotics Learning SystemDocument5 pagesRobotics Learning SystemDimple SharmaNo ratings yet
- Artificial Intelligence, Automation and The Future of Competence at Work (2021)Document171 pagesArtificial Intelligence, Automation and The Future of Competence at Work (2021)F. E. NovantoNo ratings yet
- Book Robotics AI and HumanityDocument261 pagesBook Robotics AI and HumanityAlexandro Moreno Gutiérrez100% (2)
- 2024 Crescendo KickoffDocument11 pages2024 Crescendo KickofflexnschubeNo ratings yet
- ĐỀ+ GIẢI CHI TIẾT- ĐỀ THI THỬ SỐ 48Document27 pagesĐỀ+ GIẢI CHI TIẾT- ĐỀ THI THỬ SỐ 48Đỗ Ulaw Đổi TênNo ratings yet
- Project TitleDocument3 pagesProject TitlemaniNo ratings yet
- Gray, K & Wegner, DM - Uncanny ValleyDocument6 pagesGray, K & Wegner, DM - Uncanny ValleyAngel MartorellNo ratings yet
- Aws Robomaker DGDocument493 pagesAws Robomaker DGJose ZamalloaNo ratings yet
- RobotszzDocument236 pagesRobotszzfred100% (1)
- Telemetry & Wireless Sensor NetworkDocument10 pagesTelemetry & Wireless Sensor NetworkSwapan DasNo ratings yet
- Life Second Edition Intermediate Unit 4Document7 pagesLife Second Edition Intermediate Unit 4kjrek100% (3)