You might also like
- Proportional Integral Derivative (PID)Document27 pagesProportional Integral Derivative (PID)GilagidkidNo ratings yet
- PID Control Without Math: The Darker Side by Robert LacosteDocument7 pagesPID Control Without Math: The Darker Side by Robert LacosteNae GoguNo ratings yet
- PID Controller Working Principle Explained For BeginnersDocument6 pagesPID Controller Working Principle Explained For BeginnersPramillaNo ratings yet
- Control Lab Project ReportDocument28 pagesControl Lab Project ReportDanyal QamarNo ratings yet
- PLC Motor ProgrammingDocument4 pagesPLC Motor ProgrammingInstrumentation ToolsNo ratings yet
- F5 GTM Concepts Guide v11Document209 pagesF5 GTM Concepts Guide v11Majnu SmNo ratings yet
- PLC WiringDocument7 pagesPLC WiringInstrumentation ToolsNo ratings yet
- At-15 Series III 3B6 Operator ManualDocument39 pagesAt-15 Series III 3B6 Operator ManualFausto Herrera B100% (4)
- P, I, D, PI, PD, and PID ControlDocument14 pagesP, I, D, PI, PD, and PID ControlArnav KothiyalNo ratings yet
- Historical Background of The SchoolDocument2 pagesHistorical Background of The SchoolJoel Daen50% (2)
- Taco Bell - Re EngineeringDocument6 pagesTaco Bell - Re Engineeringabcxyz2811100% (6)
- 01.anatomy of A Feedback Control SystemDocument8 pages01.anatomy of A Feedback Control SystemMahesh GonuguntlaNo ratings yet
- Introduction to PID Temperature ControlDocument8 pagesIntroduction to PID Temperature ControlBộ Môn DieuKhienhoc100% (1)
- The Working Principle of A PID Controller For BeginnersDocument15 pagesThe Working Principle of A PID Controller For BeginnersSaber AbdelaalNo ratings yet
- PID ControllerDocument20 pagesPID ControlleramitbslpawarNo ratings yet
- Design and applications of fuzzy logic PID controllerDocument19 pagesDesign and applications of fuzzy logic PID controllerPriya BhardwajNo ratings yet
- (Food Engineering Series) Gustavo V Barbosa-Cánovas - Humberto Vega-Mercado - Dehydration of Foods PDFDocument339 pages(Food Engineering Series) Gustavo V Barbosa-Cánovas - Humberto Vega-Mercado - Dehydration of Foods PDFLis FernandesNo ratings yet
- Tarea2 Investigacion-Mcca-190090Document13 pagesTarea2 Investigacion-Mcca-190090Christian MendezNo ratings yet
- Designing Pid Controller Using Labview For Controlling Fluid Level of VesselDocument5 pagesDesigning Pid Controller Using Labview For Controlling Fluid Level of VesselDeepu GudiyaNo ratings yet
- Control SystemsDocument18 pagesControl Systemsgayatri jaltareNo ratings yet
- Development of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringDocument23 pagesDevelopment of A Temperature Control System: Hakan AYKULU 20083263 Department of Computer EngineeringHakan AykuluNo ratings yet
- Jurnal 1Document5 pagesJurnal 1Zakia Puspa RamdhaniNo ratings yet
- Kfetrkt: Plant T) Process KeDocument4 pagesKfetrkt: Plant T) Process KeAmogh RNo ratings yet
- Universidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoDocument6 pagesUniversidad Politécnica Salesiana: Sistema de Control en Tiempo ContinuoAndres LozanoNo ratings yet
- Control EngineeringDocument137 pagesControl EngineeringDuc-Duy Pham NguyenNo ratings yet
- Ingenieria de ControlesDocument91 pagesIngenieria de ControlesJulio César Millán BarcoNo ratings yet
- PID Theory From WikipediaDocument7 pagesPID Theory From Wikipediaputra-tzuNo ratings yet
- PID & PLC Controllers ExplainedDocument4 pagesPID & PLC Controllers ExplainedRadab HameedNo ratings yet
- How Does A PID Controller Work - Structure & Tuning MethodsDocument12 pagesHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984No ratings yet
- System DynamicsDocument137 pagesSystem DynamicsFevzi Çakmak BolatNo ratings yet
- PID Theory Explained, Komplett PDFDocument5 pagesPID Theory Explained, Komplett PDFThierry BaudorreNo ratings yet
- Thermal Characteristics of Pid Controller Water HeaterDocument10 pagesThermal Characteristics of Pid Controller Water HeaterEhab QabashNo ratings yet
- Temperature Monitoring SystemDocument15 pagesTemperature Monitoring SystemAmanjit KaurNo ratings yet
- Temperature Monitoring SystemDocument15 pagesTemperature Monitoring SystemAmanjit KaurNo ratings yet
- Control Manual Lab 8Document12 pagesControl Manual Lab 8Hussain HadiNo ratings yet
- InputDocument13 pagesInputMuhamed IbrahimNo ratings yet
- PID ControllersDocument6 pagesPID ControllersNguyễn HảiNo ratings yet
- Mohamed IbrahimDocument15 pagesMohamed IbrahimMuhamed IbrahimNo ratings yet
- Pid Control TheoryDocument8 pagesPid Control TheorySonu SinghNo ratings yet
- Closed Loop Hydraulic Actuatormodelforrealtimesimulationwith PIDPart 2Document29 pagesClosed Loop Hydraulic Actuatormodelforrealtimesimulationwith PIDPart 2marcos Ojeda GomezNo ratings yet
- Embedded Systems and Control Systems': An Open-Loop ControllerDocument5 pagesEmbedded Systems and Control Systems': An Open-Loop Controllermohed_kamalNo ratings yet
- Control Part 1Document5 pagesControl Part 1Su Yen YapNo ratings yet
- Pid ThoryDocument24 pagesPid ThoryPravin KumarNo ratings yet
- CHAPTERDocument15 pagesCHAPTERJeevan N BNo ratings yet
- Pid Basic CodeDocument14 pagesPid Basic Codechandushar1604No ratings yet
- IoT2x Module 4 PID ActivityDocument5 pagesIoT2x Module 4 PID Activityvanishree raNo ratings yet
- PID ReportDocument38 pagesPID ReportNishiya Vijayan100% (1)
- Automated Control Resumen Unidd IVDocument23 pagesAutomated Control Resumen Unidd IVRakgnar LodbrokNo ratings yet
- Lab10 CompletoDocument10 pagesLab10 CompletoLuis Fernando Ramos OlandaNo ratings yet
- What Is A PID ControllerDocument11 pagesWhat Is A PID ControllerANRG Batch 11No ratings yet
- PID For Dummies: SearchDocument13 pagesPID For Dummies: SearchChinmoy DasNo ratings yet
- Solutions in CheDocument145 pagesSolutions in CheAnonymous 0zrCNQNo ratings yet
- Courseware Sample by Lab-VoltDocument24 pagesCourseware Sample by Lab-VoltiedmondNo ratings yet
- Control AdoresDocument6 pagesControl AdoresRebeca LópezNo ratings yet
- Monitoring and Control Systems OverviewDocument5 pagesMonitoring and Control Systems OverviewShakila ShakiNo ratings yet
- PID CONTRILLER J (1) )Document18 pagesPID CONTRILLER J (1) )Loretta CardozoNo ratings yet
- PID BasicDocument23 pagesPID BasicEliyanto E BudiartoNo ratings yet
- Digital Pid Controller - 72S173Document15 pagesDigital Pid Controller - 72S173Pandimadevi GanesanNo ratings yet
- PID CONTROLLER EXPERIMENTDocument13 pagesPID CONTROLLER EXPERIMENTMohd KhairiNo ratings yet
- ChE 5105 Group Experiment on PID Temperature ControlDocument10 pagesChE 5105 Group Experiment on PID Temperature ControlStephanie SomongcadNo ratings yet
- DA-PID DesignDocument6 pagesDA-PID Designjamal2877No ratings yet
- PiddocsDocument50 pagesPiddocsscribsunilNo ratings yet
- 1-Introduction MechatronicsDocument34 pages1-Introduction Mechatronicsteklaykibrom3No ratings yet
- From Design To Implementation: Linear ControllersDocument22 pagesFrom Design To Implementation: Linear Controllersสหายดิว ลูกพระอาทิตย์No ratings yet
- Banda Transportadora Polos Lógicos Teoria de ControlDocument25 pagesBanda Transportadora Polos Lógicos Teoria de ControlDayanna GómezNo ratings yet
- PLC Math InstructionsDocument4 pagesPLC Math InstructionsInstrumentation ToolsNo ratings yet
- PLC Ladder Logic Example ProgramDocument4 pagesPLC Ladder Logic Example ProgramInstrumentation ToolsNo ratings yet
- PLC Data Comparison InstructionsDocument4 pagesPLC Data Comparison InstructionsInstrumentation ToolsNo ratings yet
- PLC AnalogDocument3 pagesPLC AnalogInstrumentation ToolsNo ratings yet
- PLC Questions and AnswersDocument13 pagesPLC Questions and AnswersInstrumentation ToolsNo ratings yet
- PLC Logic Questions and AnswersDocument3 pagesPLC Logic Questions and AnswersInstrumentation ToolsNo ratings yet
- PLC Programming For PneumaticsDocument9 pagesPLC Programming For PneumaticsInstrumentation ToolsNo ratings yet
- PLC ConfigurationDocument3 pagesPLC ConfigurationInstrumentation ToolsNo ratings yet
- PLC Ladder Logic Example of AlarmsDocument8 pagesPLC Ladder Logic Example of AlarmsInstrumentation ToolsNo ratings yet
- Simple PLC ProgramDocument5 pagesSimple PLC ProgramInstrumentation ToolsNo ratings yet
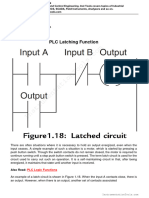
- PLC Latching FunctionDocument4 pagesPLC Latching FunctionInstrumentation ToolsNo ratings yet
- PLC Counter InstructionsDocument7 pagesPLC Counter InstructionsInstrumentation ToolsNo ratings yet
- PLC Motor LogicDocument5 pagesPLC Motor LogicInstrumentation ToolsNo ratings yet
- Programmable Logic Controller ExampleDocument3 pagesProgrammable Logic Controller ExampleInstrumentation ToolsNo ratings yet
- PLC LogicDocument8 pagesPLC LogicInstrumentation ToolsNo ratings yet
- Override Control SystemDocument4 pagesOverride Control SystemInstrumentation ToolsNo ratings yet
- PLC Analog Input SamplingDocument2 pagesPLC Analog Input SamplingInstrumentation ToolsNo ratings yet
- ThermowellsDocument3 pagesThermowellsInstrumentation ToolsNo ratings yet
- Level Sensor AnimationDocument2 pagesLevel Sensor AnimationInstrumentation ToolsNo ratings yet
- Valve StandardsDocument3 pagesValve StandardsInstrumentation ToolsNo ratings yet
- Liapunovs StabilityDocument2 pagesLiapunovs StabilityInstrumentation ToolsNo ratings yet
- Liapunovs Stability CriterionDocument4 pagesLiapunovs Stability CriterionInstrumentation ToolsNo ratings yet
- Level Sensors TerminologyDocument6 pagesLevel Sensors TerminologyInstrumentation ToolsNo ratings yet
- Linear Ma To Square Root MaDocument1 pageLinear Ma To Square Root MaInstrumentation ToolsNo ratings yet
- Linear Approximation Non Linear SystemDocument5 pagesLinear Approximation Non Linear SystemInstrumentation ToolsNo ratings yet
- Linear To Square Root ExtractionDocument2 pagesLinear To Square Root ExtractionInstrumentation ToolsNo ratings yet
- Level Instrumentation Design BasicsDocument12 pagesLevel Instrumentation Design BasicsInstrumentation ToolsNo ratings yet
- Resistors DisadvantagesDocument3 pagesResistors DisadvantagesInstrumentation ToolsNo ratings yet
- Orphanage Cum Old Age Home: Amruta Prakash BedmuthaDocument2 pagesOrphanage Cum Old Age Home: Amruta Prakash BedmuthaNamrata Bhandari100% (1)
- CPA Review Module on Accounting Standards and RegulationDocument13 pagesCPA Review Module on Accounting Standards and RegulationLuiNo ratings yet
- LinAlg CompleteDocument331 pagesLinAlg Completes0uizNo ratings yet
- XFARDocument14 pagesXFARRIZA SAMPAGANo ratings yet
- Jun 2005 - AnsDocument13 pagesJun 2005 - AnsHubbak Khan100% (1)
- Dispersion of Carbon Nanotubes in Water and Non-Aqueous SolventsDocument41 pagesDispersion of Carbon Nanotubes in Water and Non-Aqueous SolventsSantiago OrtizNo ratings yet
- SampleContract ShuttleDocument10 pagesSampleContract ShuttleLJ BNo ratings yet
- Collective BargainingDocument18 pagesCollective Bargainingchandni kundel100% (3)
- Korean Enthusiasm and PatriotismDocument68 pagesKorean Enthusiasm and PatriotismYukino Hera100% (1)
- First Preliminary Music Video ScriptDocument1 pageFirst Preliminary Music Video Scriptapi-455734096No ratings yet
- Folktalesofkeral 00 MenoDocument124 pagesFolktalesofkeral 00 Menoreena sudhirNo ratings yet
- Saura, Jasmin E. - DVM - 2B Biochemistry (Activity 2)Document2 pagesSaura, Jasmin E. - DVM - 2B Biochemistry (Activity 2)Jasmin SauraNo ratings yet
- Forcepoint Email Security Configuration Information v8.5Document64 pagesForcepoint Email Security Configuration Information v8.5ajay chaudharyNo ratings yet
- Williamstown Cannabis Cultivation PlanDocument48 pagesWilliamstown Cannabis Cultivation PlanOltion JaupajNo ratings yet
- v16 n3Document219 pagesv16 n3Mark ReinhardtNo ratings yet
- Pradeep Kumaresan Resume - Software Testing ExperienceDocument3 pagesPradeep Kumaresan Resume - Software Testing ExperienceSANTANo ratings yet
- Bizagi Licensing Explained ENGDocument7 pagesBizagi Licensing Explained ENGGuidoNo ratings yet
- Robert K Boscarato and Matthew Skaggs Corprate Credit Book Draft 1.Document70 pagesRobert K Boscarato and Matthew Skaggs Corprate Credit Book Draft 1.Robert BoscaratoNo ratings yet
- Advanced Engineering Economics: Combining FactorsDocument19 pagesAdvanced Engineering Economics: Combining FactorsA GlaumNo ratings yet
- SP Manual Addendum For OS 3 - 03Document2 pagesSP Manual Addendum For OS 3 - 03kevmac88No ratings yet
- SHP 21 DS en 20Document4 pagesSHP 21 DS en 20Marko Maky ZivkovicNo ratings yet
- Irregular Verbs Multiple ChoiceDocument2 pagesIrregular Verbs Multiple Choicecloudcatching0% (1)
- RSG 303Document196 pagesRSG 303Makinde TimiNo ratings yet
- E VTOLDocument12 pagesE VTOLsaikumar raviNo ratings yet